オムニホイール搭載のJetbotの兄弟機! NVIDIA Kayaを作ったよの製作編です。
https://qiita.com/usashirou/items/27ebfa85b9408f1593ea
今回の筐体も、精密板金加工を行う協和工業株式会社さんに製作してもらいました。
https://www.bankin.co.jp/
レーザー加工

一枚のアルミ板をレーザー加工機で切り出します。

タッピング
ネジ加工をします。

プレス
今回は、角度があるので逃げが結構大変です。

一個一個角度を確認していきます。

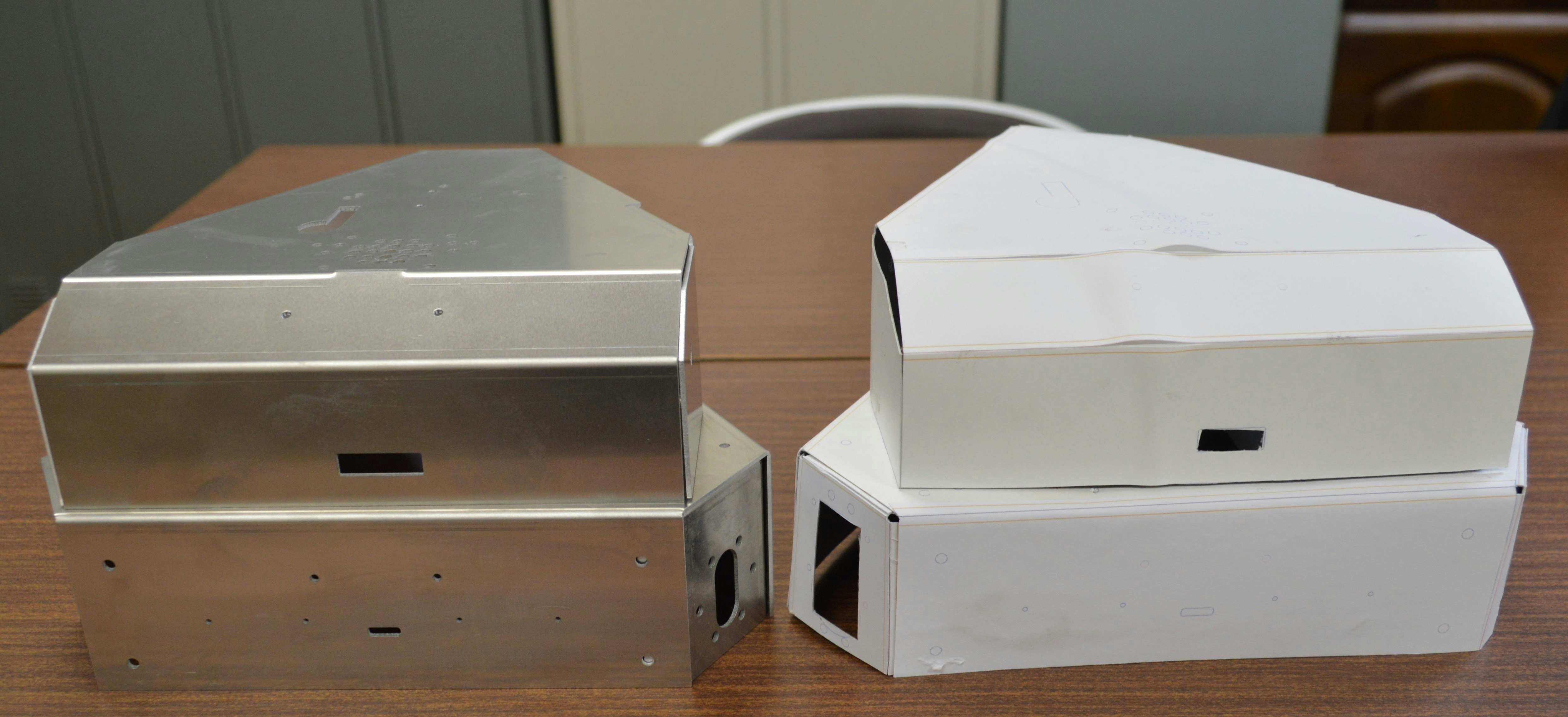
仮組み
今回も、紙で試作をしておきました
当然、一緒ですね
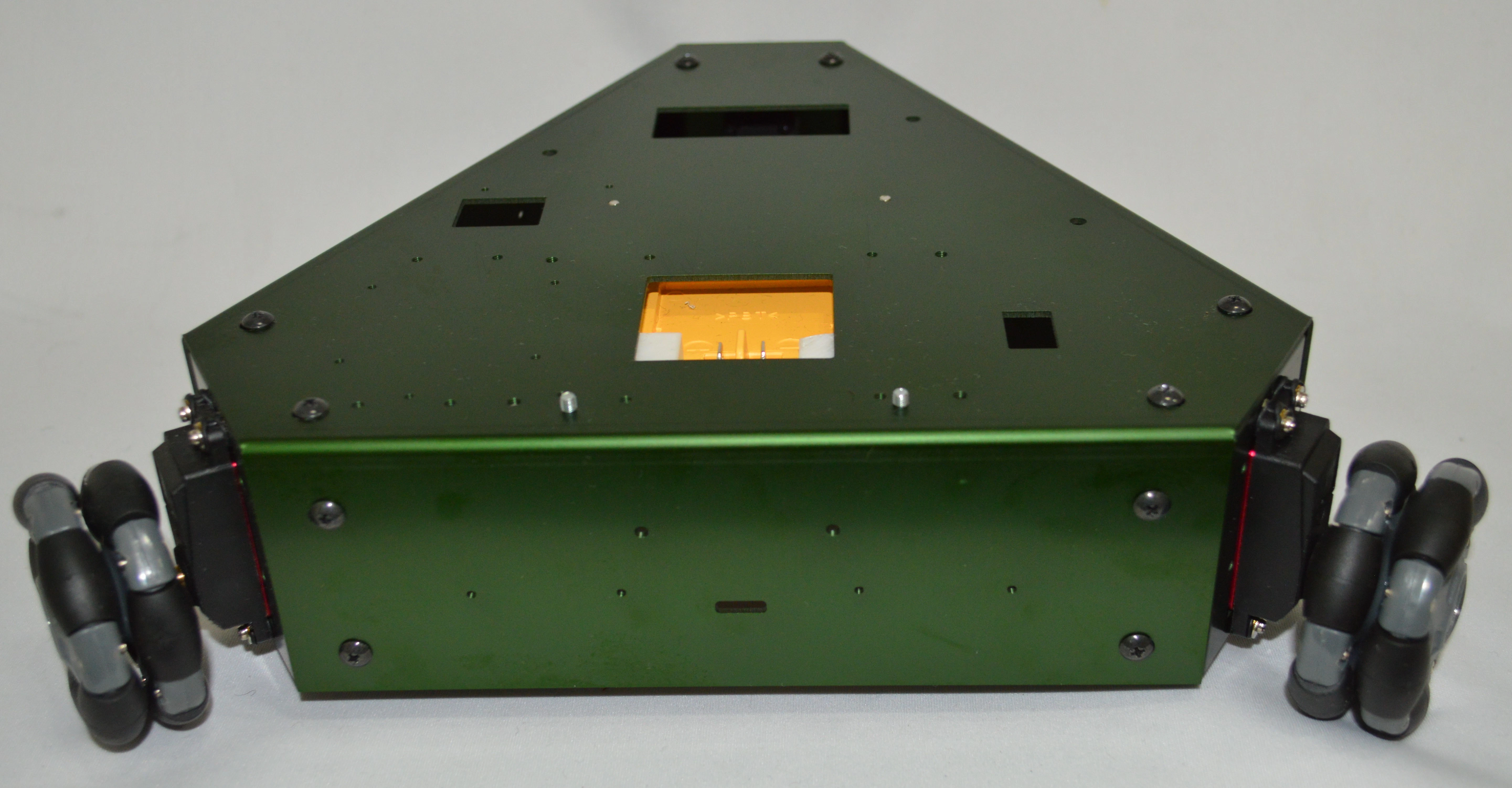
アルマイト
Kayaのイメージカラーが緑なので緑アルマイトにしました

ボトム組立
サーボモーターの組み立て
TS-315とサーボホルダーを組み立てます。

3個のサーボホルダーとボトム、バッテリのマウンタを取り付けます。

バッテリー
バッテリーはマキタの18Vバッテリを使用しました。
マキタのバッテリーは、アダプターが分売されている上、マウンタのデータが公開されており3Dプリンターで出力したものを使用しました。

58㎜のオムニホイールを取り付けます。
電圧変換
JetsonNanoには5V6Aを
モーターには可変出力のDC/DCコンバーターにより7V出力しています。
Raspberry Pi3/JetsonNanoで使えるDC-DCコンバータを見てみよう
https://qiita.com/usashirou/items/f12486e3ecd28028818a
DC/DCコンバーターとスイッチを取り付けます。

裏から

トップ組み立て
シリアル変換ボードと、JetsonNanoを取り付けます。

基板用ワンタッチスペーサー
シリアル変換ボードは、足を付ける穴が開いていないので、秋月電子の以下を使用しました。
ただし、半分に切ったりと調整はしています。
【P-12347】 基板用ワンタッチスペーサー 両面テープ付
http://akizukidenshi.com/catalog/g/gP-12347/
Wi-Fiアンテナの取り付け

Realsense用USBケーブル
Amazonで売っているL型のUSB3.0対応ケーブルを使用しました。

Realsenseの取り付け
今回は、RealSenseD435です。

完成

テスト走行
MicroSDは、交換しやすいようにエクステンションケーブルを使っています。
Jetson nano by Isaac Kaya#jetson pic.twitter.com/Mu1N0CyQkN
— usashirou (@usashirou1) July 23, 2020