nVidiaが提唱するNVIDIA Kayaを板金で製作しました。
NVIDIA Kayaとは
KayaはnVidiaが提唱している自律走行ロボットであり、Isaacというロボット開発のプラットフォームを使用している。
Kayaは3Dプリンタで製作したシャーシにオムニホイールと、JetsonNano、Realsenseを組み合わせたものです。
https://docs.nvidia.com/isaac/isaac/doc/tutorials/assemble_kaya.html

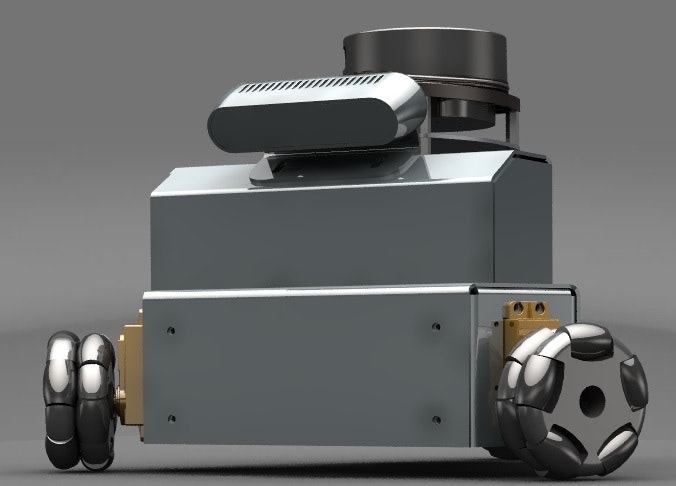
完成イメージ
3Dデータです。
紙で試作品を作ります。
ROTSONとの比較です。
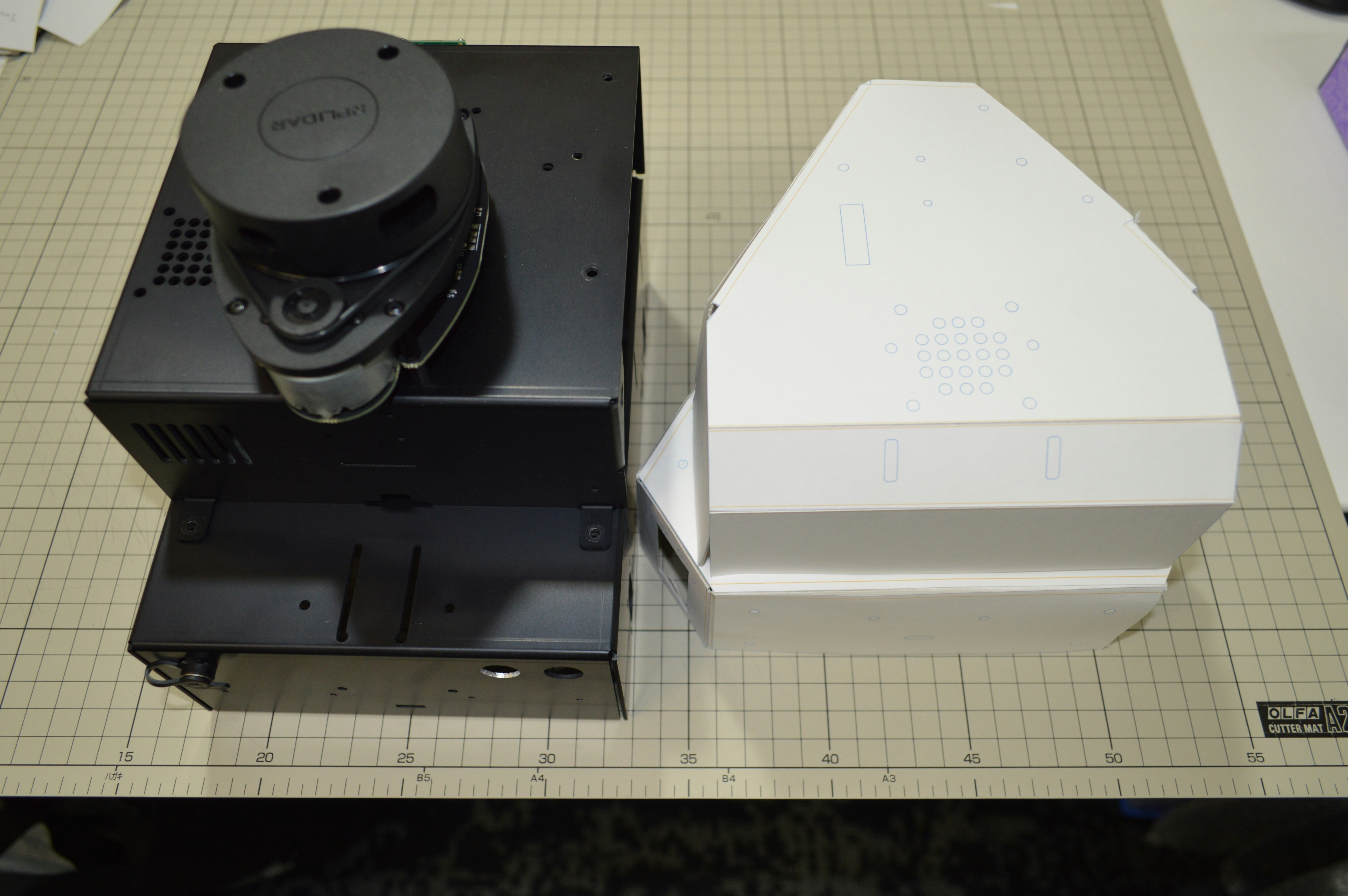
当初はこのサイズを考えていました。
しかし、搭載するバッテリーのサイズから一回り大きくなることに
サーボモータ
KayaはDynamixel MX-12Wが推奨されていますが、シリアルサーボTS-315でも使えるようマウントを設計しました。
360度回転対応ワンワイヤー(1Wire)シリアルサーボ TS-315を使う
オムニホイール
オムニホイールは、アダプターを3Dプリンターで作るようになっていますが、今回は、58mmのものを使用しました。
360度サーボモーターに58mmオムニホイールを使う
https://qiita.com/usashirou/items/a8665f94892964827613
以上で金額をかなり抑える事が可能です。
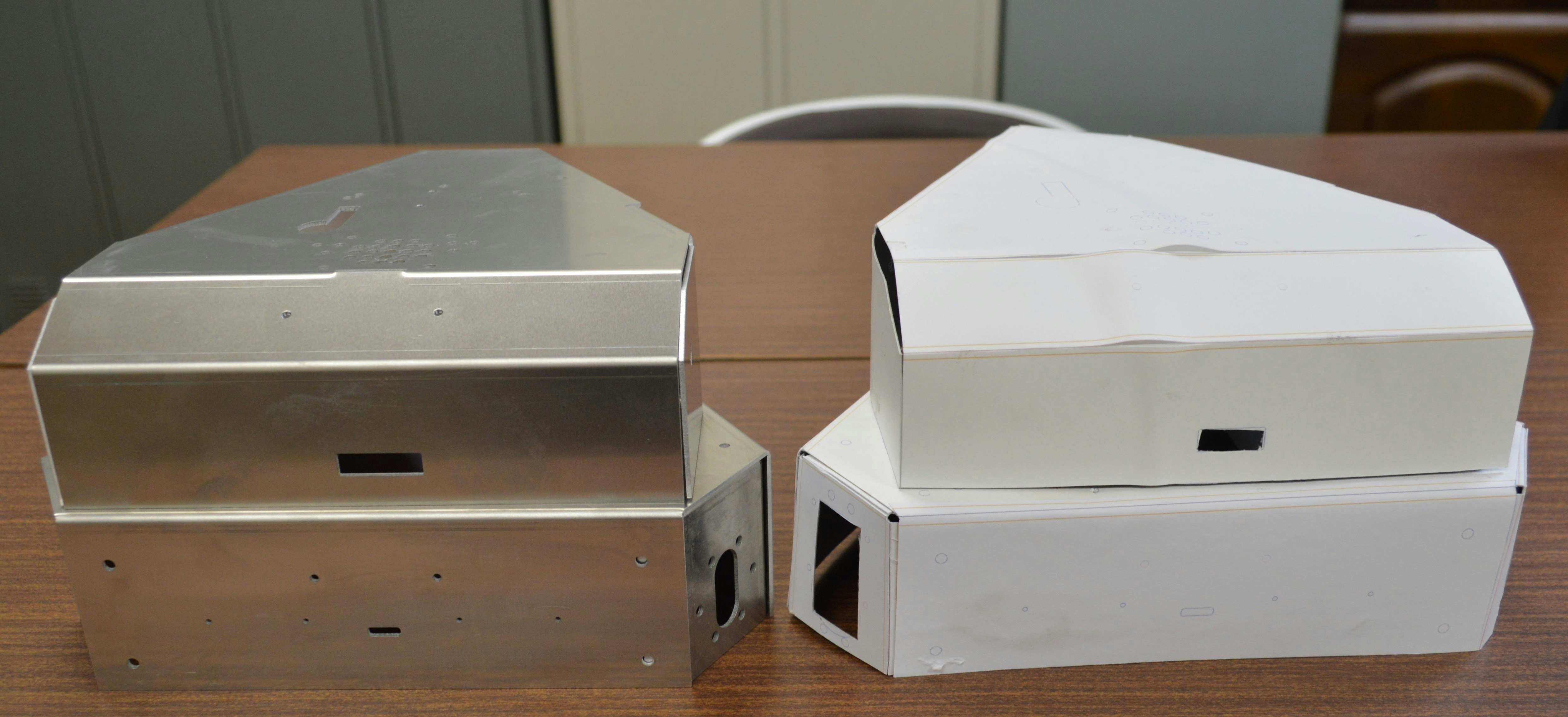
筐体の製作
今回も、協和工業さんに製作して頂きました。
http://www.bankin.co.jp/
材料はアルミのA5052 t1.5です。

当然ですが紙で作ったものと同じですね
アルマイト
Kayaはイメージカラーが緑のようなので緑アルマイトにしてみました。

全景
標準構成のRealsenseD435を搭載した状態です。
RPLidarA1もYDLidarX2も搭載可能です。
