👉 前回の記事:🐶 Raspberry Pi 4 の初期設定
https://qiita.com/tri-edge/items/df545c0aaac6975101ed
このセクションでは、Raspberry Pi の環境を整えるために以下を行います:
必要な Python ライブラリの導入
ハードウェアインターフェースの有効化(I2C、カメラ)
モジュールが正しく動作するかの確認
👉 FreeNove ロボット犬のコードを実行する前に、必須の手順です
🧭 手順の概要
- ロボットコードの取得と Python3 の設定
- 必要なインターフェース(I2C、カメラ)の有効化
- 必要な Python ライブラリの導入
- ハードウェア通信の確認
📥 コードの取得と Python3 の設定
FreeNove Robot Dog のコードをダウンロード

cd
git clone --depth 1 https://github.com/Freenove/Freenove_Robot_Dog_Kit_for_Raspberry_Pi
👉 ホームディレクトリにコードがダウンロードされます
Python バージョンの確認
python
👉 このチュートリアルでは Python3 が必要です
デフォルトが Python2 の場合は、以下のように変更します:
cd /usr/bin
sudo rm python
sudo ln -s python3 python
⚙️ 必要なインターフェースの有効化(GUI)
Raspberry Pi のデスクトップ環境から設定できます。
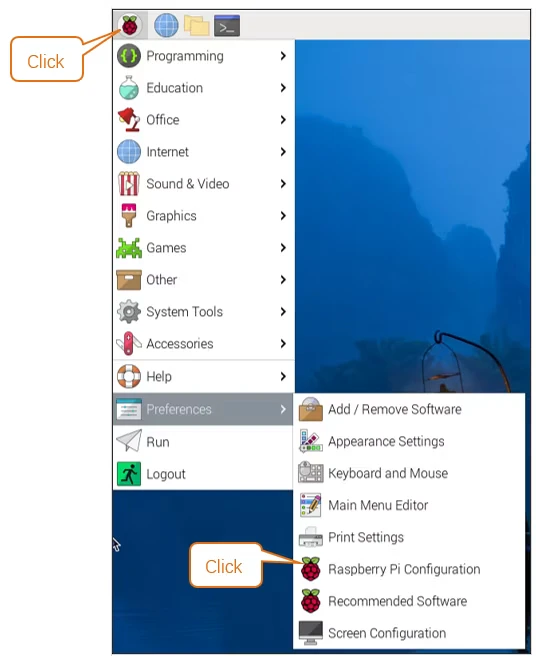
🖱️ 設定画面を開く
左上の Raspberry Pi アイコンをクリック
以下へ移動:
Preferences → Raspberry Pi Configuration
🔧 インターフェースを有効化
以下を ON にします:
✅ SSH → リモートターミナル接続
✅ VNC → リモートデスクトップ接続(本記事で使用)
✅ I2C → センサー用(MPU6050、PCA9685)
👉 他の項目は必要がなければ OFF のままでOK
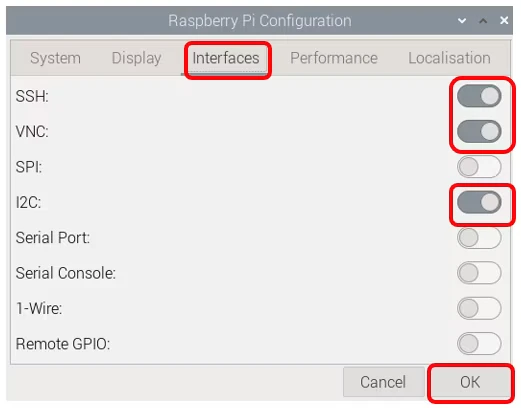
「OK」をクリック
🔄 再起動
sudo reboot
👉 設定を反映するために必要です
📦 Python ライブラリの導入
プロジェクトディレクトリへ移動:
cd ~/Freenove_Robot_Dog_Kit_for_Raspberry_Pi/Code
実行:
sudo python setup.py
👉 以下のライブラリが導入されます:
- ハードウェア制御用ライブラリ
- センサードライバ
- GUI関連(例:PyQt5)
🔍 I2C モジュールの確認(システムレベル)
まず、I2C のカーネルモジュールが有効か確認します:
lsmod | grep i2c
期待される出力例
i2c_dev
i2c_brcmstb
i2c_designware_platform
i2c_designware_core
💡 解説
- これらは I2C 通信に必要なカーネルモジュールです
- 表示されていれば I2C は有効化済み
❌ 何も表示されない場合 → I2C が有効になっていません
✅ 出力があれば → システムレベルでは正常
🔍 I2C 接続確認(デバイスレベル)
ツールの導入
sudo apt-get install i2c-tools
sudo apt-get install python3-smbus
デバイススキャン
i2cdetect -y 1
期待される結果
40 → 検出
48 → 検出
💡 これらの意味
- I2C はデバイス同士を接続する通信方式です。
- 各デバイスには固有のアドレスがあります。
- i2cdetect は接続されているデバイスを一覧表示します。
👉 このロボットでの対応関係
0x40 → PCA9685(サーボコントローラ)
→ ロボットの脚(モーター)を制御
0x48 → PCF8591(ADCチップ)
→ センサーやアナログデータの取得
✅ 両方表示されれば、コントロール基板は正常に接続されています
⚠️ 注意点
- Raspberry Pi OS(デスクトップ版)を使用すること
- インストールには時間がかかる場合があります
- 電源は安定したアダプタを使用(PCのUSB給電は非推奨)
- 失敗した場合は setup.py を再実行
✅ まとめ
-FreeNove リポジトリをクローン
- Python3 をデフォルトに設定
- SSH / VNC / I2C / カメラを有効化
- 必要なライブラリを導入
- I2C 通信を確認
🎯 重要ポイント
確認は2段階あります:
✅ lsmod → I2C がシステムで有効か
✅ i2cdetect → デバイスが接続されているか
両方成功して初めて、ロボットは正常に動作します
👉 次の記事
🛠️ FreeNove ロボット犬の組み立て
https://qiita.com/tri-edge/items/61102e5ae0df0b685eff