MyActuator社制のBLDCモータ"RMD-X10"(https://www.myactuator.com/rmd-x) をM5Stacjから駆動する方法について.
はじめに
Boston Dynamics社SPOTやMIT cheetahなどの四足ロボットが開発され,一部は市場に出回るようになってきました.
この流れに乗ってか,小型・高出力のBLDCサーボが多く販売され始めています.しかも1台50,000円〜100,000円程度と安い.Dynamixel Xシリーズと同じくらいの価格帯ですね.非常に便利なので使ってみましょう.
今回は,2023年現在で最新版のモータードライバであるV3系列の使い方を説明します.
必要なもの
- RMD-X10 (SwitchScienceで購入)
- 電源装置(48V)
- M5 Stack
- M5 Stack COMMU
電源装置はある程度電流値を確保できるものが良いでしょう.筆者の環境ではTEXIO PSW-720L8を使用しました.
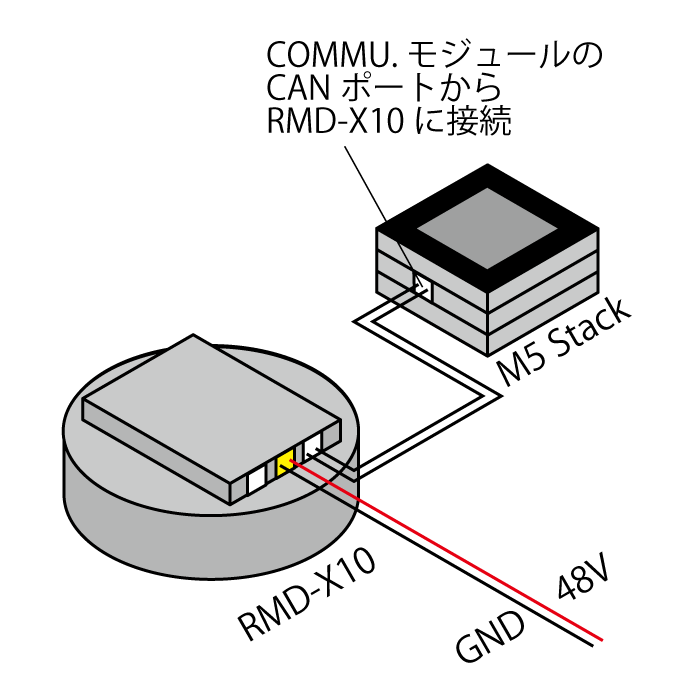
システムの構成は以下のようになります.
一般にCAN通信には終端抵抗が必要になりますが,今回は追加で終端抵抗を準備する必要はありません.
CAN_HとCAN_Lを逆に繋いでしまうと通信できませんので注意してください.
Arduino IDEの準備
まずは,M5 Stackのプログラミング環境を整えます.筆者は情弱なので,かんたんに書けるようにArduino IDEを使います.
(参考) https://docs.m5stack.com/
- Arduino IDEをインストールしましょう.
- Arduino IDEを起動し,「ファイル」から「環境設定」を開き,「追加のボードマネージャのURL」に" https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json "を追記します.
- 「ツール」から「ボードマネージャ」を開きます.
- 「esp32」を検索し,「esp32 by Espressif Systems」をインストール(ver. 2.0.2で動作確認)
- 「ツール」から「ライブラリを管理」を選択して「ライブラリマネージャ」を呼び出します.
- 「M5stack」を検索し,「M5stack by M5stack」をインストール(ver. 0.3.9で動作確認)
- M5 StackをPCに接続し,「ツール」から「ボード」を展開し,"M5Stack-core-ESP32"を選択します.
次に,COMMUモジュールでCAN通信ができるようにmpc_canライブラリを追加します.
ただし,sparkfun社のArduino用CAN-Bus shieldのライブラリも同名ですので,ここではmpc_can_m5に変更します.
-
C:\Users\ユーザー名\Documents\Arduino\libraries\M5Stack\examples\Modules\COMMUのMCP_CAN_lib.rarを解凍 (windows以外の方は同じディレクトリを探してください) - 生成された
MPC_CAN_libフォルダをC:\Users\ユーザー名\Documents\Arduino\librariesに移動 -
mcp_can.hをmcp_can_m5.hに変更 -
mcp_can.cppをmcp_can_m5.cppに変更 -
mcp_can_m5.hをエディタで開き,MCP_CANをMCP_CAN_M5に置換 -
mcp_can_m5.cppをエディタで開き,MCP_CANをMCP_CAN_M5に置換
あるいは, https://github.com/t-kamimura/RMDx8_m5stack をクローンし,以上の変更を済ませた"MPC_CAN_lib"フォルダを抜き出す.
RMD-X8のCANプロトコルを確認
https://www.myactuator.com/dowload からプロトコルをダウンロードして読みましょう.
動作確認用に,PIDパラメータを問い合わせるデータはこちら.
| Data[0] | Data[1] | Data[2] | Data[3] | Data[4] | Data[5] | Data[6] | Data[7] |
|---|---|---|---|---|---|---|---|
| 0x30 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
これを送ってやると,以下のようなデータが返ってきます.
| Data[0] | Data[1] | Data[2] | Data[3] | Data[4] | Data[5] | Data[6] | Data[7] |
|---|---|---|---|---|---|---|---|
| 0x30 | 0x00 | anglePID_KP | anglePID_KI | speedPID_KP | speedPID_KI | currentPID_KP | currentPID_KI |
今回は,このデータの送受信までやってみることにしましょう.
送受信プログラムを作る
下地となるプログラム
サンプルプログラムをベースにしましょう.
Arduino IDEを開き,「ファイル」から「スケッチ例」→「M5Stack」→「Modules」→「COMMU」→「CAN」のcommu_can_receiverとcommu_can_transmitterを開きます.
今回は,commu_can_receiverをベースにcommu_can_transmitterを合体させてプログラムを改造していきます.
「ファイル」から「名前を付けて保存」で,RMD-X10_test.inoとしてファイルを作っておきます.
ライブラリ名の変更
mpc_can.hを書き換えたので,このクラス関連の記述を修正します.
- 7行目の
#include<mpc_can.h>を#include <mcp_can_m5.h>に変更します. - 26行目の
MCP_CAN CAN0(12);をMCP_CAN_M5 CAN0(12);に変更します.
受信プログラムの改造
サンプルプログラムでは,読み込みも書き込みも void test_can(); という関数名になっています.まずは受信する関数の名前を変更しましょう.
- 29行目の
void test_can();をvoid read_can();に変更 - 81行目の
void test_can(){をvoid read_can(){に変更 - 55行目の
test_can();をread_can();に変更
これで読み込み側は完成です.
送信プログラムの組み込み
commu_can_transmitterから,送信に関する部分を持ってきます.
-
void read_can();の下にvoid write_can();を追加 - "commu_can_transmitter"の
void test_can{~}(71行目から82行目)を全部コピーし,"RMD-X8_test"の最後の部分にペースト -
void test_can{~}の名前をvoid write_can{~}に変更 -
void loop{~}内のread_can();のすぐ上にwrite_can();を追加 -
write_can()が始まってすぐ下のbyte sndStat = CAN0.sendMsgBuf(0x100, 0, 8, data);をbyte sndStat = CAN0.sendMsgBuf(0x141, 0, 8, data);に変更(送り先アドレスを指定 - )
- 14行目を
byte data[8] = {0x30, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};に変更
これで完成です.出来上がったプログラムを以下に示します.
/*
Please add MCP_CAN_LIB to your library first........
MCP_CAN_LIB file in M5stack lib examples -> modules -> COMMU -> MCP_CAN_lib.rar
*/
#include <M5Stack.h>
#include <mcp_can_m5.h>
// #include "m5_logo.h"
/**
* variable for loop
*/
byte data[8] = {0x30, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
/**
* variable for CAN
*/
long unsigned int rxId;
unsigned char len = 0;
unsigned char rxBuf[8];
char msgString[128]; // Array to store serial string
#define CAN0_INT 15 // Set INT to pin 2
MCP_CAN_M5 CAN0(12); // Set CS to pin 10
void init_can();
void read_can();
void write_can();
void setup() {
M5.begin();
M5.Power.begin();
Serial.begin(9600);
Serial2.begin(9600, SERIAL_8N1, 16, 17);
// M5.Lcd.pushImage(0, 0, 320, 240, (uint16_t *)gImage_logoM5);
delay(500);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextColor(GREEN, BLACK);
M5.Lcd.setTextSize(1);
init_can();
Serial.println("Test CAN...");
}
void loop() {
if(M5.BtnA.wasPressed())
{
M5.Lcd.clear();
M5.Lcd.printf("CAN Test A!\n");
// M5.Lcd.pushImage(0, 0, 320, 240, (uint16_t *)gImage_logoM5);
init_can();
Serial.println("Test CAN...");
}
write_can();
read_can();
M5.update();
}
void init_can(){
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(0, 10);
// M5.Lcd.pushImage(0, 0, 320, 240, (uint16_t *)gImage_logoM5);
delay(500);
M5.Lcd.printf("CAN Test A!\n");
M5.Lcd.printf("Receive first, then testing for sending function!\n");
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_1000KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
CAN0.setMode(MCP_NORMAL); // Set operation mode to normal so the MCP2515 sends acks to received data.
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Receive Example...");
}
void read_can(){
if(!digitalRead(CAN0_INT)) // If CAN0_INT pin is low, read receive buffer
{
CAN0.readMsgBuf(&rxId, &len, rxBuf); // Read data: len = data length, buf = data byte(s)
if((rxId & 0x80000000) == 0x80000000) // Determine if ID is standard (11 bits) or extended (29 bits)
sprintf(msgString, "Extended ID: 0x%.8lX DLC: %1d Data:", (rxId & 0x1FFFFFFF), len);
else
sprintf(msgString, "Standard ID: 0x%.3lX DLC: %1d Data:", rxId, len);
Serial.print(msgString);
M5.Lcd.printf(msgString);
if((rxId & 0x40000000) == 0x40000000){ // Determine if message is a remote request frame.
sprintf(msgString, " REMOTE REQUEST FRAME");
Serial.print(msgString);
} else {
for(byte i = 0; i<len; i++){
sprintf(msgString, " 0x%.2X", rxBuf[i]);
Serial.print(msgString);
M5.Lcd.printf(msgString);
}
}
M5.Lcd.printf("\n");
Serial.println();
}
}
void write_can(){
// send data: ID = 0x100, Standard CAN Frame, Data length = 8 bytes, 'data' = array of data bytes to send
byte sndStat = CAN0.sendMsgBuf(0x141, 0, 8, data);
if(sndStat == CAN_OK){
Serial.println("Message Sent Successfully!");
M5.Lcd.printf("Message Sent Successfully!\n");
} else {
Serial.println("Error Sending Message...");
M5.Lcd.printf("Error Sending Message...\n");
}
delay(200); // send data per 200ms
}
動かしてみる
M5 stackにプログラムを書き込み,モーターとつないで電源を投入します.
モーターからデータが返ってきていたら成功です.