背景
・開発環境/ランタイムのアプリ依存は完全に排除することは非常に困難。
・ROSアプリによっては特定のversionやpackageに依存する。(例えば、melodic依存など)
・docker使えば、上記は排除できるし、アプリ提供者がシステムを気にしなくてもいい。
・開発環境もランタイムもアプリごとに自由だし、界面もdockerでわかりやすい。
ここで試してみること
- ROSノードを複数のdockerで起動して通信できることを確認する。
- ROS2ノードを複数のdockerで起動して通信できることを確認する。
- ROS/ROS2ノードを複数のdockerで起動し、ros1_bridgeを利用してROS/ROS2間で通信できることを確認する。
(*) ROSのrosmasterはhostで動作させることにする。他のROS/ROS2ノードはすべてdockerでの実行。
環境
Host Linux: Ubuntu16.04.5 LTS
Docker: 18.09.0, build 4d60db4
Host Linux ROS version: kinetic
Docker imageの準備
Host LinuxのROS及びdocker自体のインストール設定は省きます。(ググればOK)
docker pull ros:kinetic
docker pull ros:melodic
docker pull osrf/ros2:bouncy-desktop
docker pull osrf/ros2:bouncy-ros1-bridge
docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros melodic 9425ec5f7a7f 3 days ago 1.27GB
osrf/ros2 bouncy-ros1-bridge 495f9879df9e 2 weeks ago 1.2GB
osrf/ros2 bouncy-desktop 3e9aa775362d 2 weeks ago 2.41GB
ros kinetic 6f91828bbf93 4 weeks ago 1.19GB
1. ROSノード複数Docker通信
[Overview]
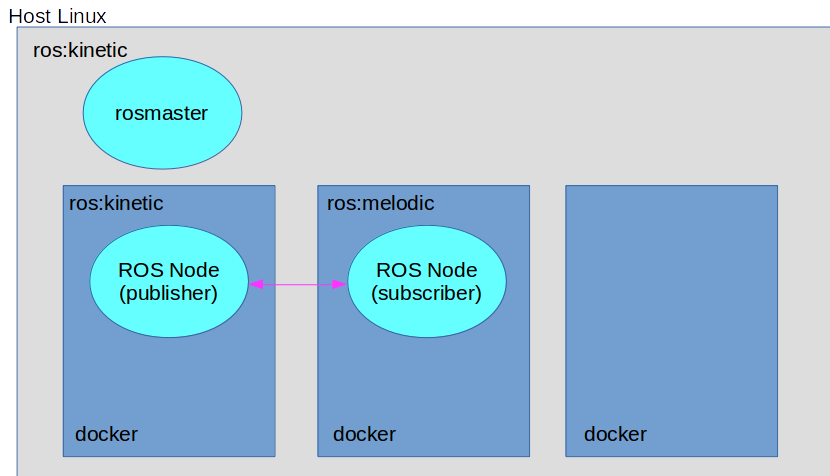
[Procedure]
1-1. Host Linuxでroscore起動
# docker networkを利用するので以下の設定でroscoreを起動する。
export ROS_MASTER_URI=http://172.17.0.1:11311
export ROS_IP=172.17.0.1
roscore
...
1-2. ros:kinecit dockerでpublisher起動
# docker ros:kinetic start
docker run -it 6f91828bbf93
# net-tools install (IP addressを念の為確認するため)
apt update
apt install net-tools
ifconfig
# ROS IP setting
export ROS_MASTER_URI=http://172.17.0.1:11311
export ROS_IP=172.17.0.2
# topic publish start
rostopic pub -r 10 /chatter std_msgs/String "this is ros:kinetic"
1-3. ros:melodic dockerでsubscliber起動
# docker ros:melodic start
docker run -it 9425ec5f7a7f
# net-tools install (IP addressを念の為確認するため)
apt update
apt install net-tools
ifconfig
# ROS IP setting
export ROS_MASTER_URI=http://172.17.0.1:11311
export ROS_IP=172.17.0.3
# topic publish start
root@c489bf255877:/# rostopic echo /chatter
data: "this is ros:kinetic"
...
(当然ですが、)ROSノード間でPub/Sub通信できていることが確認できました。
2. ROS2ノード複数Docker通信
[Overview]
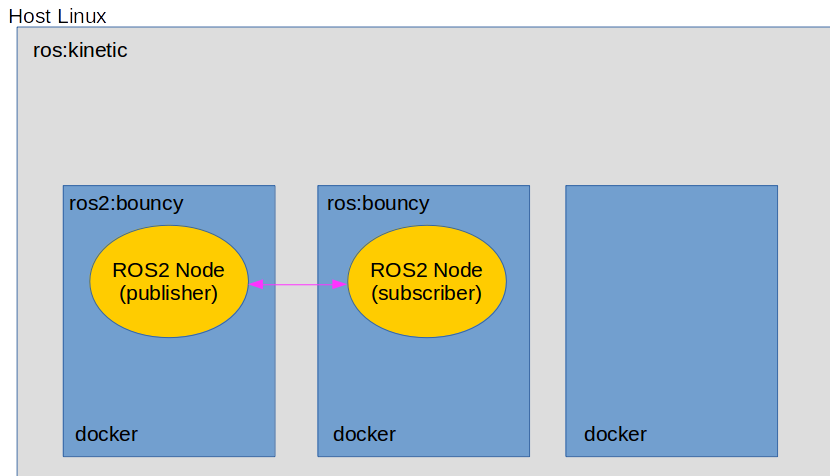
2-1. ros2:bouncy-desktop dockerでpublisher起動
# docker ros2:bouncy-desktop start
docker run -it 3e9aa775362d
# topic publish start
ros2 topic pub /chatter std_msgs/String "data: this is ros2:bouncy-desktop"
publisher: beginning loop
publishing #1: std_msgs.msg.String(data='this is ros2:bouncy-desktop')
2-2. ros2:bouncy-desktop dockerでsubscriber起動
# docker ros2:bouncy-desktop start
docker run -it 3e9aa775362d
# topic subscriber start
ros2 topic echo /chatter std_msgs/String
data: this is ros2:bouncy-desktop
ROS2ノードでdocker間通信ができました。
3. ROS/ROS2ノード複数Docker通信
[Overview]
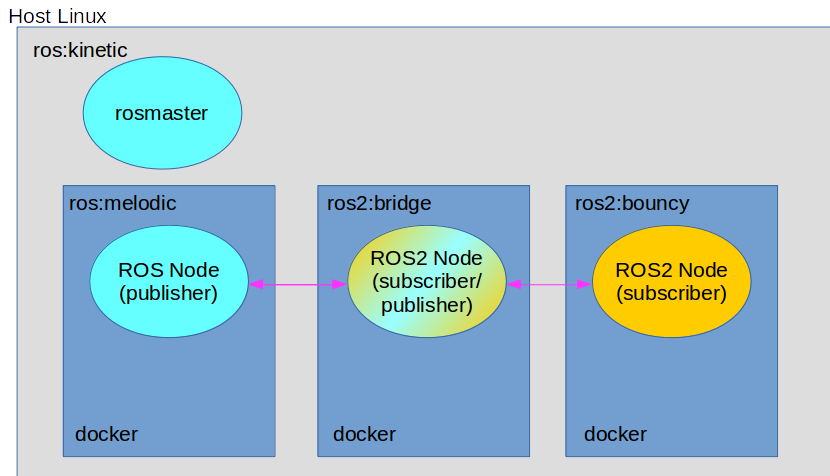
3-1. Host Linuxでroscore起動
# docker networkを利用するので以下の設定でroscoreを起動する。
export ROS_MASTER_URI=http://172.17.0.1:11311
export ROS_IP=172.17.0.1
roscore
...
3-2. ros:melodic dockerでpublisher起動
# docker ros:melodic start
docker run -it 9425ec5f7a7f
# net-tools install (IP addressを念の為確認するため)
apt update
apt install net-tools
ifconfig
# ROS IP setting
export ROS_MASTER_URI=http://172.17.0.1:11311
export ROS_IP=172.17.0.2
# topic publish start
rostopic pub /chatter std_msgs/String "this is ros:melodic"
3-3. docker ros2:bouncy-ros1-bridge start
# docker ros2:bouncy-ros1-bridge start
docker run -it 495f9879df9e
# net-tools install (IP addressを念の為確認するため)
apt update
apt install net-tools
ifconfig
# ROS IP setting
export ROS_MASTER_URI=http://172.17.0.1:11311
export ROS_IP=172.17.0.5
# ROS/ROS2 bridge start
ros2 run ros1_bridge dynamic_bridge /chatter std_msgs/String
created 1to2 bridge for topic '/chatter' with ROS 1 type 'std_msgs/String' and ROS 2 type 'std_msgs/String'
3-4. ros2:bouncy-desktop dockerでsubscriber起動
# docker ros2:bouncy-desktop start
docker run -it 3e9aa775362d
# topic subscriber start
ros2 topic echo /chatter std_msgs/String
data: this is ros:melodic
ROS bridgeを利用して、docker間でROS/ROS2通信を確認できました。
ということで、dockerを使えばROS分散型開発が簡単にできる。