TOPPERS/EV3RTを使用し、C言語で開発する環境を構築する方法を紹介します。
そもそも、TOPPERS/EV3RTとは?
・TOPPERS/EV3RT(Real-Time platform for EV3)とは、メモリ保護機能付きRTOSであるTOPPERS/HRP2カーネルをベースとしたMindstorm EV3用の開発プラットフォームです。
・EV3RTを使って、CやC++などの開発言語でリアルタイム性の高いアプリケーションを開発することができます。
・ETロボコン2015の公式ソフトウェアプラットフォームの1つとして採用されています。
・名古屋大学 大学院情報科学研究科 高田研究室を中心に開発を進めています。
以上、TOPPERSページより引用しました。なお、ETロボコン2016でも公式ソフトウェアプラットフォームとして採用されているようです。
私の端末のOSがWindows10、開発言語はC、開発環境がTOPPERS/EV3RTなので、ここではWindouwsでの構築法になるのでご了承ください!
Cygwinの導入
まずはCygwinのサイトからインストーラをダウンロードします。
→64bit版 →32bit版
ダウンロードしたら、インストーラ起動!
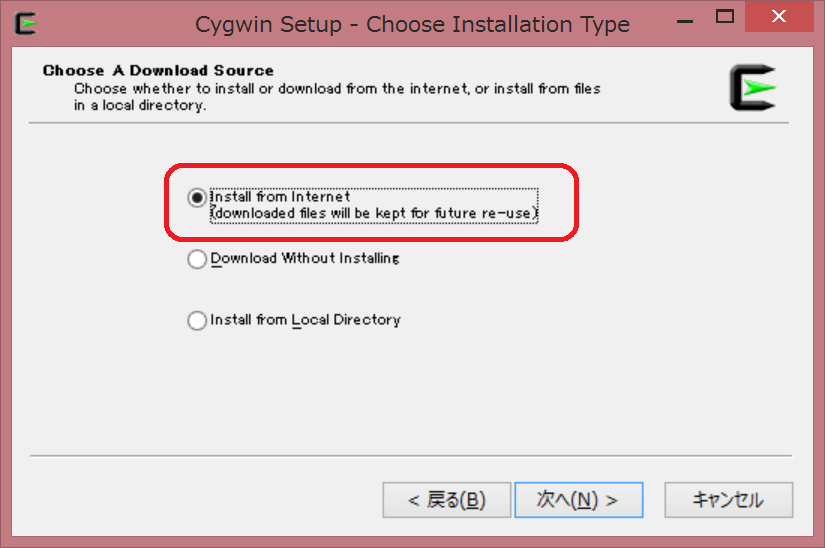
「次へ」を選択し、インストールの方法を選択します。インターネットが使えるなら、"Install from Internet"を選択して、「次へ」をクリックします。
その後、インストール先やダウンロードしたパッケージの保存先を設定します。私はデフォルトの設定のまま設定しちゃいました。(忘れっぽいので、任意の保存先にすると後々後悔しそう、という残念な理由です。。。)
パッケージをダウンロードするサイトを決めます。特に理由がなければ、安心と信頼の日本国内サイト(URL語尾が.jpのもの)からダウンロードするといいです。

今度はインストールするパッケージを選択します。必要なパッケージは以下の4つ!
- gcc-core(バージョン4.9.0-1以降のもの)
- make(バージョン4.0-2以降のもの)
- diffutils(バージョン3.3-2以降のもの)
- perl(バージョン5.22.1以降のもの)
どんな感じにやればいいのか、gcc-coreを選択する作業を通してご紹介します。
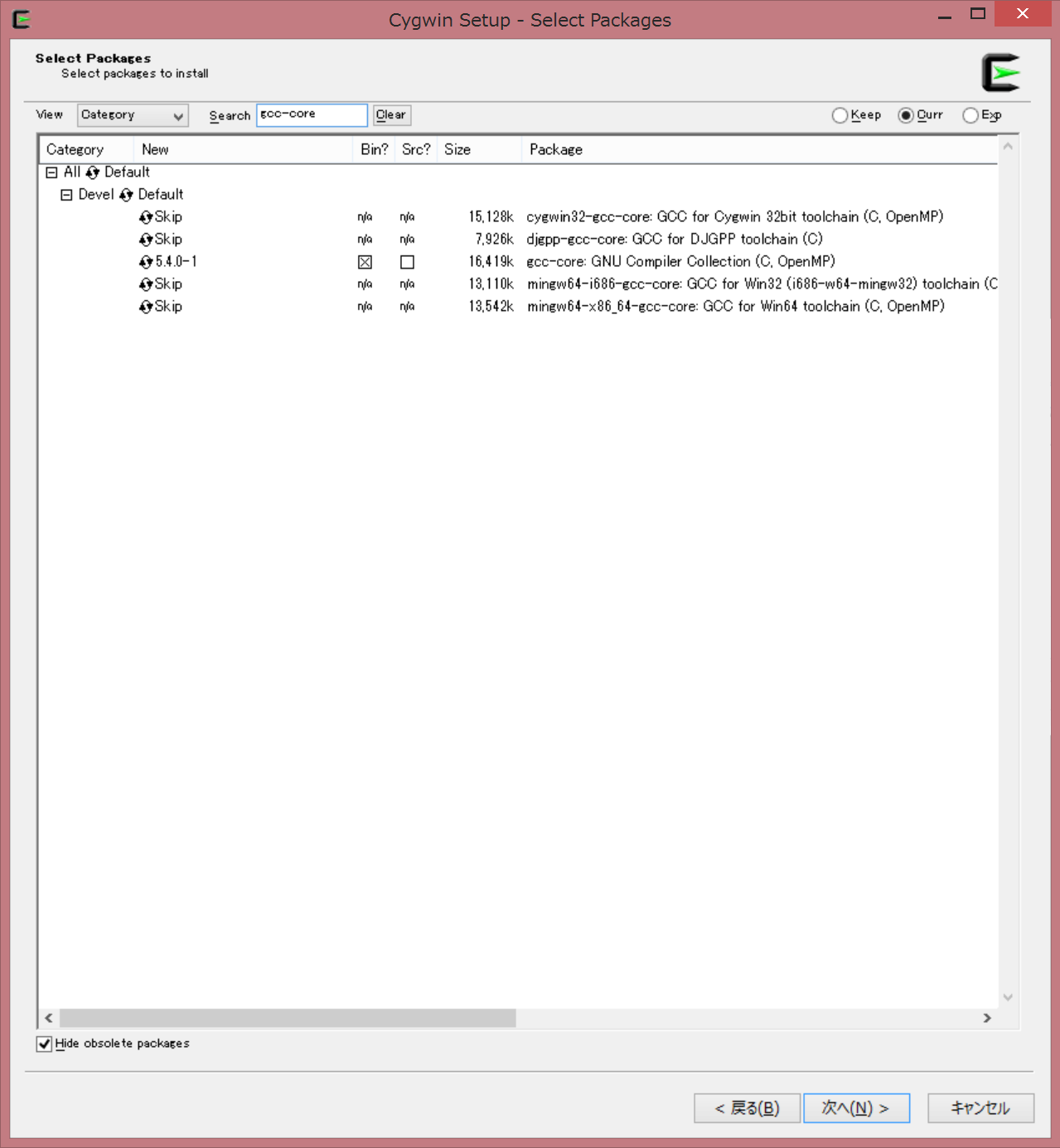
画面上部にある検索窓に”gcc-core”と入力し、表示された一覧の中から、”Devel”を選択。その後表示される一覧から、”gcc-core:GNU Compiler Collection(C, OpenMP)”を何度かクリックし、最新のバージョンを表示させます。「次へ」はまだクリックしちゃダメ!!!!
こんな感じで、残り3つも選択します。
- ”Make”で検索→”Devel”を選択→”make:The GNU version of the ‘make’ utility”の最新バージョンを表示させる。

- ”diffutils”で検索→”Utils”を選択→”diffutils:A GNU collection of diff utilities”の最新バージョンを表示させる

- ”perl”で検索→”Perl”を選択→”Perl programming language interpreter”の最新バージョンを表示させる

以上四つを選択してから(これ重要)「次へ」をクリックします。
インストールするパッケージを確認します。
「次へ」をクリックするとインストールが始まります。以上でCygwinの導入は完了です!
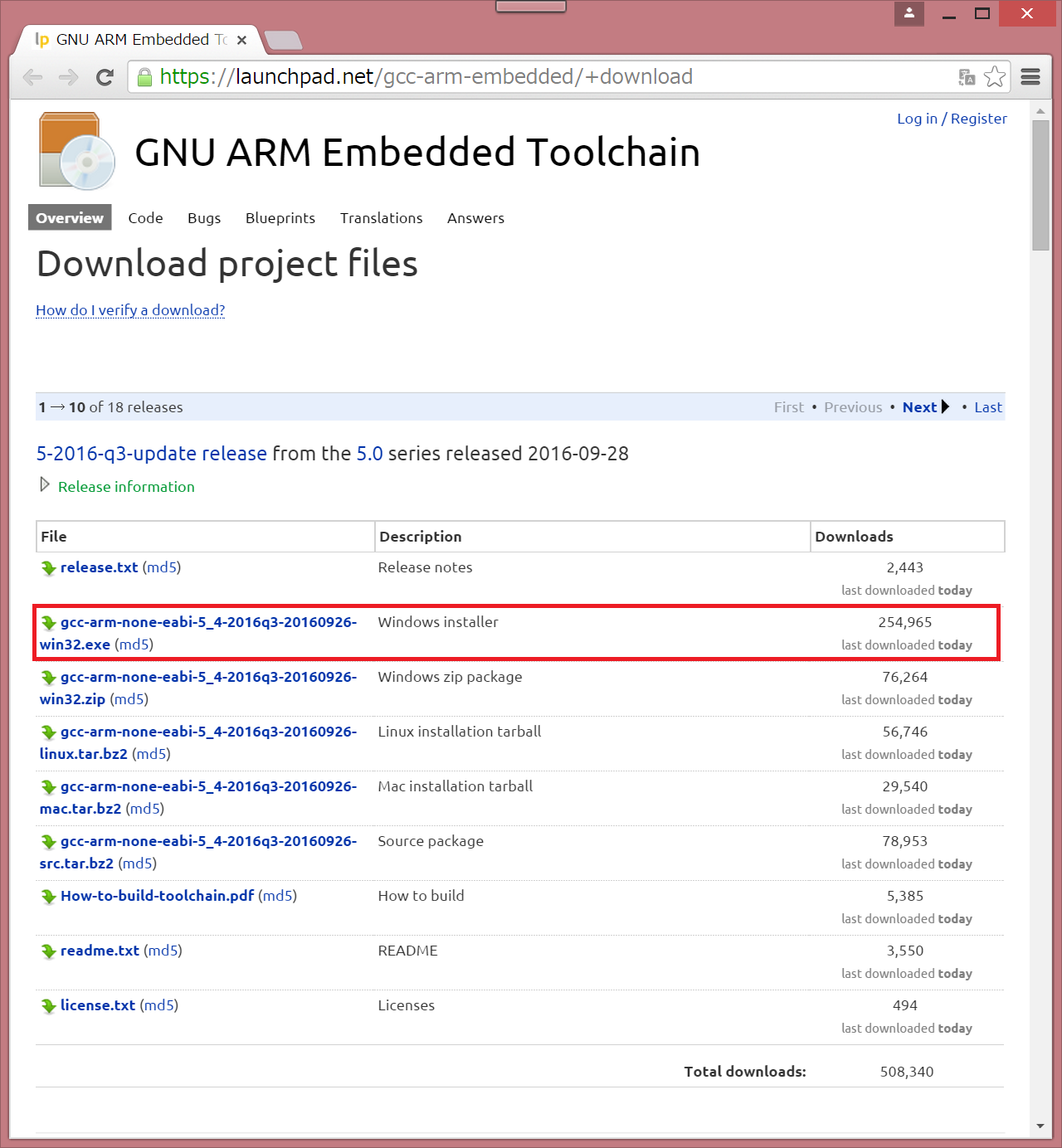
GCC ARM(GNU Tools for ARM Embedded Processors)のダウンロードとインストール
GCC ARMのサイトのダウンロードページからインストーラをダウンロードします。
ダウンロード後にインストーラを起動、言語選択画面で”English”を選択し、ライセンス確認画面までいきます。
ライセンス確認画面では、” I accept the terms of the license agreement”にチェックを入れてから次へ進んでください。
その後、インストール先のディレクトリの設定・確認をすればインストールされます。
(こんな感じです、インストール先決めたら"Installをポチっと")

インストールが完了すると上の画面のようになります。”Add path to environment variable”のみチェックを入れて(これとっても重要)、終了してください。
Cygwinを起動してarm-none-eabi-gcc -vとコマンドを入力し、自分がインストールしたバージョンが表示されればOK!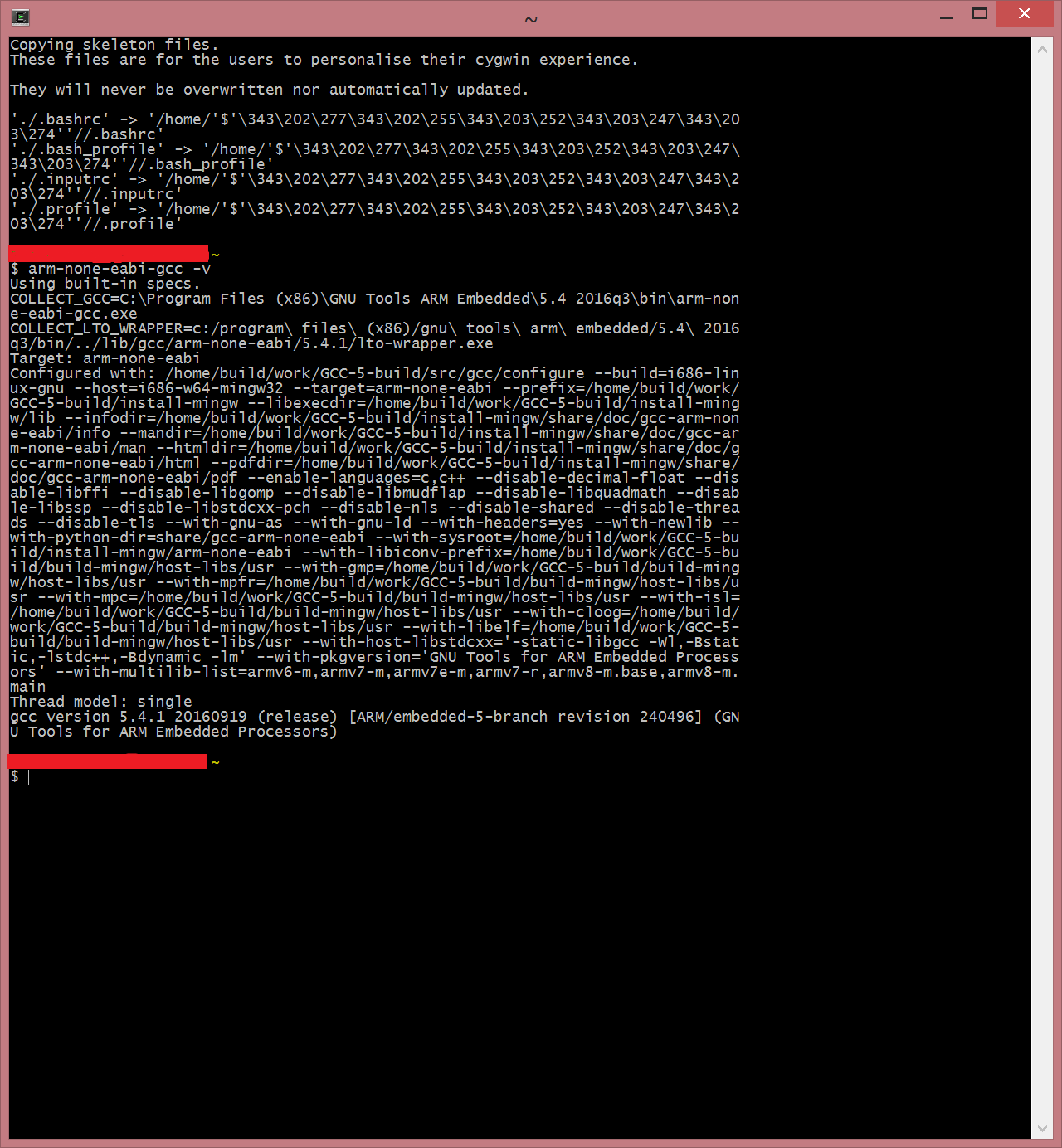
U-Bootの導入
ARM Linux Mini Computersのサイト内で"Support"→"Download"と辿っていって、Cygwin用のmkimageのバイナリをダウンロードします。(辿って探すのが面倒な方はここからDLできます)
cygwinを起動し、Mkimage.tar.gzのあるディレクトリに移動します。Chrome以外のブラウザでダウンロードした場合は、移動後に以下のコマンドを実行します。
$ mv Mkimage.tar.gz Mkimage.tar.gz.gz
$ gzip -d Mkimage.tar.gz.gz
以下のコマンドでMkimage.tar.gzの解凍とコピーを行います。
$ tar zxvf Mkimage.tar.gz
$ cp mkimage.exe /usr/local/bin
以上でU-Bootの導入完了です!
開発プラットフォームEV3RTのダウンロードとインストール
TOPPERSのダウンロードページからEV3RTのパッケージをダウンロードします。

現時点(2016/12/21)で最新のパッケージを
Zipフォルダを解凍し、プラットフォームパッケージ(hrp2.tar.xz)をC:/cygwin64にコピーします。コピーしたらCygwinを起動して、cygdrive/c/cygwin64へ移動します。
$ cd ../../
$ cd cygdrive/c/cygwin64
以下のコマンドでhrp2.tar.xzを解凍します。
$ tar xvf hrp2.tar.xz
以上で環境構築は完了です、お疲れ様でした!!