Naoqi2.5系へのアップデートでSLAMのβ版が使えるなりましたが
まだまだMove系boxって使うよね!しかも困った時に意外と対処法知らないよね!ってことで
今更だけど書いてみました。
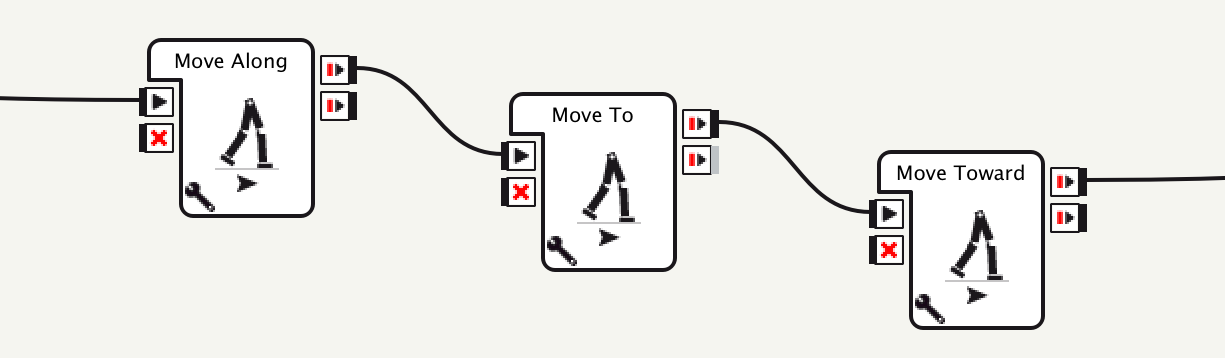
Move系boxが動かない時に考えられる原因と対処法メモ
充電ハッチがひらきっぱなし
あるよね。
機体はピンピンしてるのに動かない時はまずこれ確認しましょう。
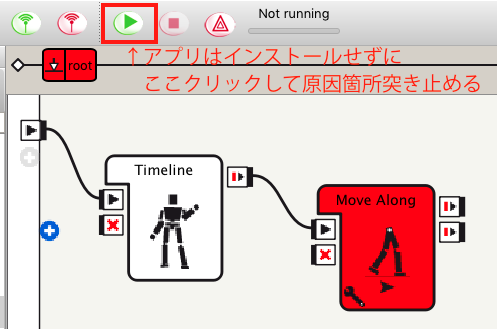
スクリプトがエラーはいてる
そりゃ動かないよね。
再生ボタン押してboxが赤くなるようなら、構文エラーとかOSのversionが対応してないとかその辺が疑われます。
足のSafetyが発動している
Pepperは安全第一!なので、通常のSafetyが有効な状態で近くに物を感知すると動けなくなります。
解除するには Set External Anti-Collision boxで Body part "Move"を"Disable"にして再生してあげます。

無理なスピードで移動させようとしてる
Pepperの移動速度は最大2km/h*なので、超えたら当然動けないよね。
同じ軌道で移動スピードを大幅に落としてみて動くようなら、速度が問題になっている可能性が高いかと。
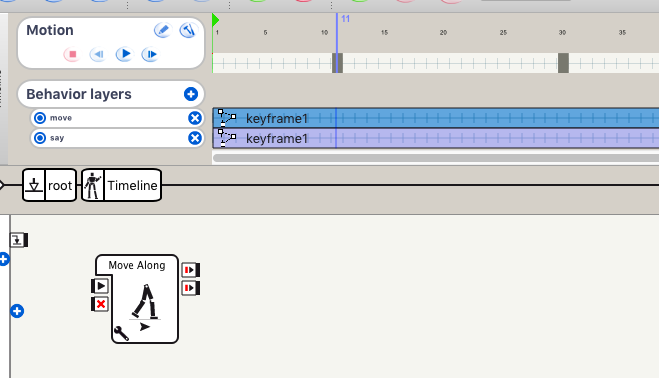
無理な姿勢で移動させようとしている
Pepperは腰を左右に曲げる(=HipRollが"0"ではない)動作と、Move系の動作を並列で実行できません。
↓例えばこういう感じ
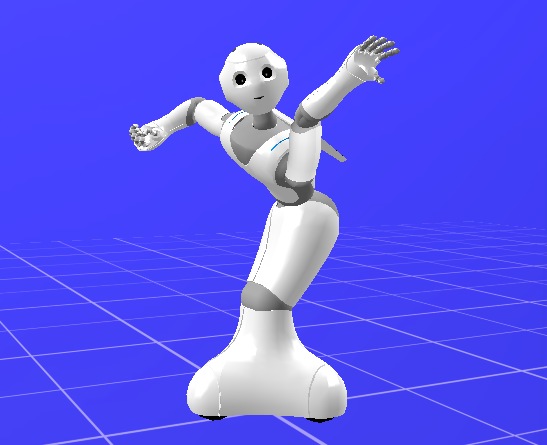
通常はMove開始時に腰が垂直に戻ったりしますが、こんな風に無理な姿勢をさせたままだと
機嫌悪くして動かなくなるかもしれません。
そもそもonStartが発火してない
うっかりこういうやつとか
こういうやつとか
ちょっと慣れてきた頃にやっちゃいがちですよね。
そもそも線つながってねえ!みたいな。そりゃ動かないよね。
初歩的なミスに気をつけてみなさんも素敵なPepper Lifeを。