皆さん、お久しぶりです。
とよはし☆ロボコンズ所属のteru0707です。
8月下旬までXROBOCONのBチームMECHANEKKOで回路班長をやっていたりしました。
今回はXROBOCONの際に実際に行った基板の同種面付けの方法について解説していこうかと思います。
今回作成した基板の仕様
- 1基板につきロボマスモーター1個分の信号線と電源供給線を分岐させる
- 信号は2ピンGHコネクタを3個取り付けそこにCANを流す
- 電源線側はバス部分にはXT60をロボマスモーター側にはXT30をつける
- XT60はオスとメス1個ずつとXT30メスを1個
JLCPCBでの同種面付け基板の発注

実際に上記の基板をJLCPCBを使って発注します。
準備するべきデータは面付け前の1枚分の基板データだけです。
まず、
日本語なら
https://jlcpcb.com/jp/
にアクセス。
英語なら
https://jlcpcb.com/JPV/
にアクセス。

するとこの様なページになるため、発注するもしくはお見積りを選択。
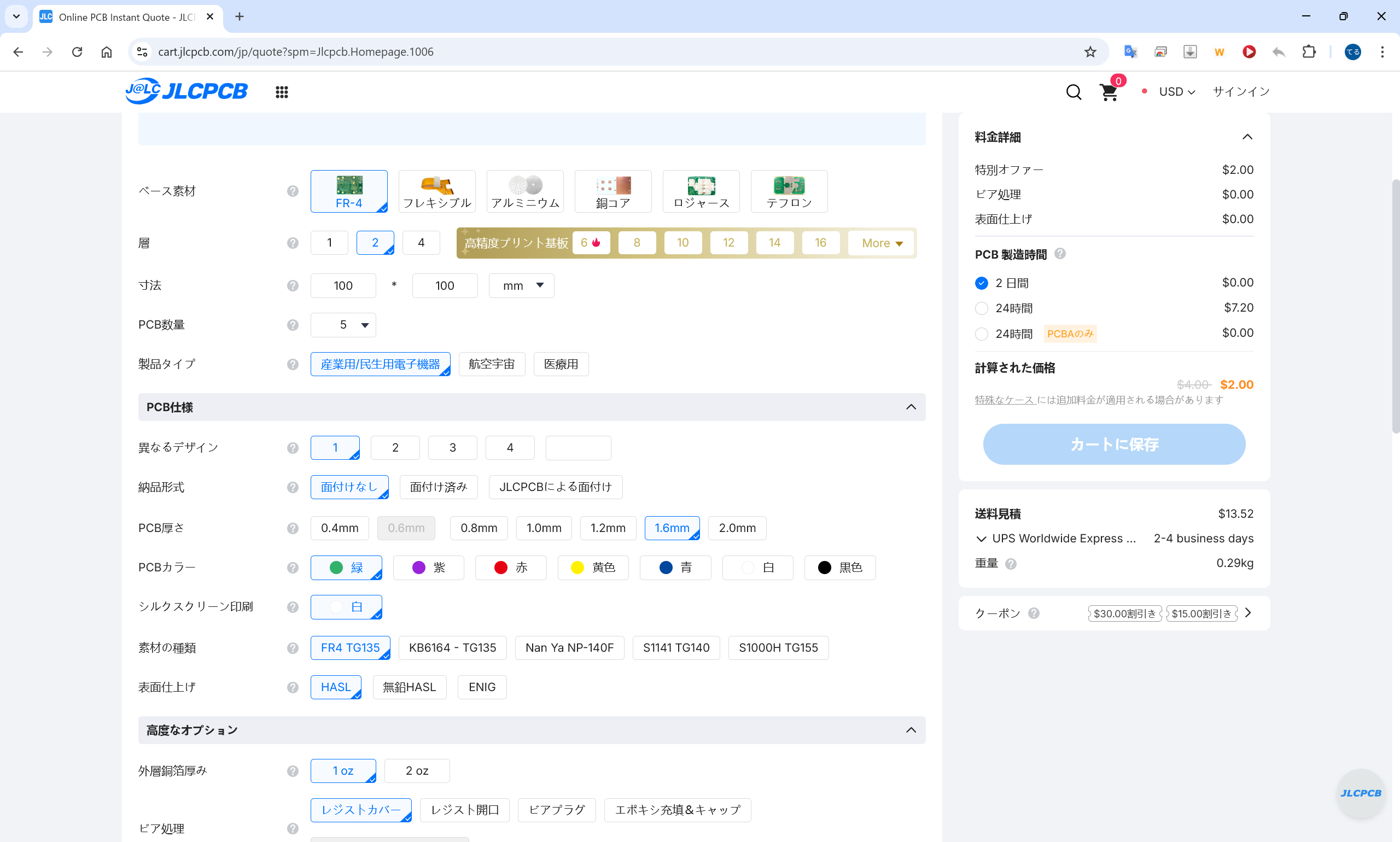
そして下記のページにてガーバーデータをアップロード。

アップロードすると寸法は自動入力されるため残りの設定はPCB数量を変更し、PCBカラーを好みの色に変更。
今回は基板を面付けするため以下の画面でJLCPCBによる面付けを選択
するとこのような画面になるため、70mm×70mm以上475mm×475mmになるように列数と行数を変更する。寸法が足りない分はエッジレールで補うことも可能である。

値段的に今回は100mm×100mm以下にしたく元の基板外形が30mm×30.5mmであるため、3行3列で設定した。
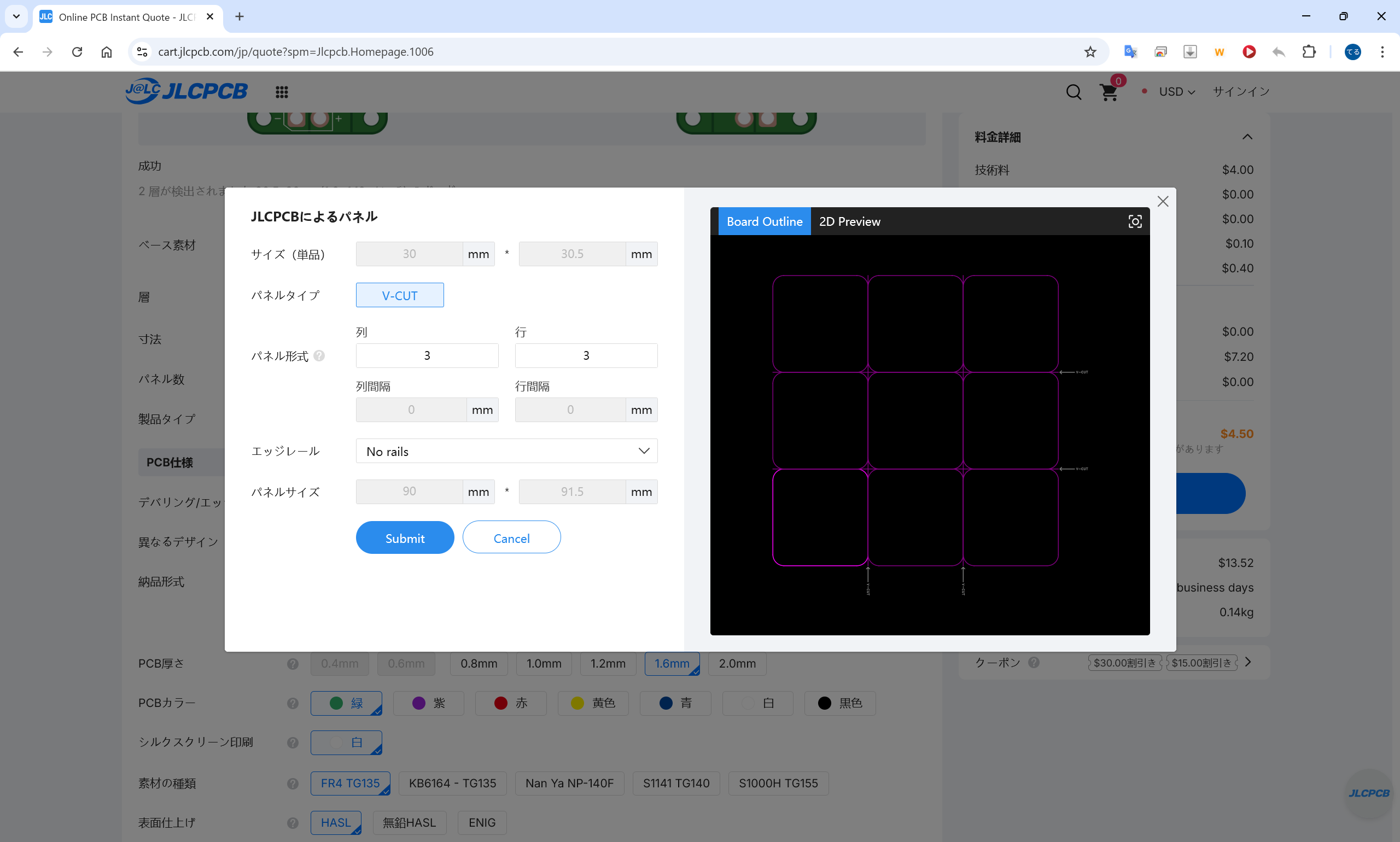
設定を行ったらSubmitを押すと設定が完了し後はいつも通り発注を行うだけです。
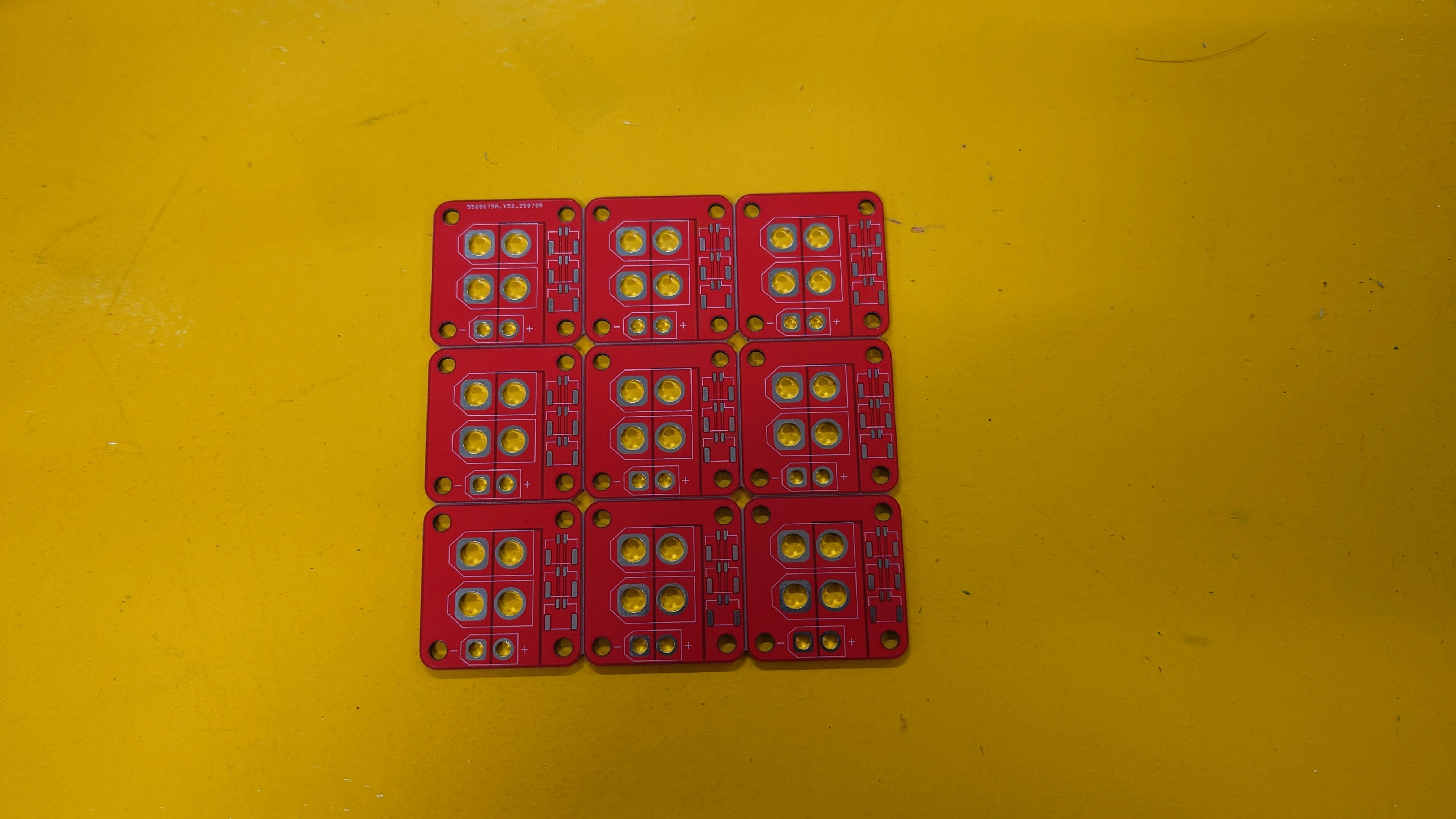
完成品
基板が届いた状態ではこのような形で来ます。
そしてVカット部分で割るとこのようになります。

まとめ
JLCPCBを用いれば本来、同種面付けを行う際に必要なコピーして並べ、V-cut指定をつけるといった煩わしい作業をせずに簡単に同種面付けを行うことができます。