#Pepperとは
【ロボット】Pepperくん導入
ソフトバンクが発売したタブレット搭載ロボットです。
どのようなことができて、どのような活用方法が考えられるのかをまとめます。
ロボットならではのシステムを構築するにはどうすればいいでしょうか
アイディアは常時募集してるので、遠慮なく下さい!(笑)
#どのような活用が今までにないソリューションを生むのか?
業務が医療系なので携わっているので、そっちよりになります
正直Pepperがどれだけ普及するかは医療福祉分野にかかってるのではないでしょうか?
・簡易な操作性を活用する
ただ目を見るだけ、ただ声をかけるだけでいろいろな機能が利用できるというのは医療福祉分野で大きなメリットだと思います。
・タブレット一体型を活用する
タブレットを利用することでより高度な制御を伴った活用が考えられると思います。
・各種センサーを活用する
・移動可能なことを活用する
どこまで可能かわかりませんが、施設内を巡回して情報を取得することで新しい活用方法があるのではないかと思います。
・どのようなデメリットが考えられるか
実際に利用しながらデメリットについても検証していきたいと思います。
#Choregraphe ボックス機能
ChoregrapheとはPepper上で動作するシステムの開発のツールで、ノンプログラミングでいろいろなことができるものです。
機能はボックスとしてまとめられていて、それの設定と流れを繋いでいくだけでPepperにいろいろなことをさせることができます。
ボックスの機能からどんなことが簡単に実現できるのかがわかるので、それを機能ごとにまとめます。
マイク
・単語認識機能
読み取りたい単語を登録して設定したしきい値以上ならば単語と認識させる。
→回答が固定されるような質問ならばこれだけでいろいろな機能が考えられる
・音源の位置がわかる
カメラ 顔認識機能
・カメラ内の顔の数を把握する
・撮影されている顔を学習する
・年齢を判定する
・性別を判定する
・笑顔、感情を判定する
・顔を追いかける
・特定の物体を追跡する
→施設内に目印となるマークを配置して移動させるとか
床にマスキングテープのようなものを張って、その線上を移動するとか実現できないかと考えてる。
・イメージ認識
→施設内の変化を認識させることができないか?
・画像認識させたい物体を学習させる(Choregrapheから対象を指定する)ことで、認識可能となる
タッチ
・バンパー部分の刺激を感知(右側か左側かも判定可)
・足部分の接触を感知(おそらく前後も判定可)
・頭部分の接触を感知(前・真ん中・後ろ)
・手部分の接触を感知(一ヶ所)
・タブレットのタッチイベントを取得
その他アクション
・しゃべる
・動く(いろいろなアニメーションが用意されている)
・音声を再生する
・写真を撮る
・赤外線通信(複数ロボットの同期した処理が行える)
・センサーでの障害物検知(右側か左側か判定)
・定義した領域内に人が出入りしたことを感知する
・LEDの制御
・メールを送受信する
・タブレット関連の操作を行う
実現できる(プログラミングを伴う)と思われる機能
・音声を録音する
・こちらの希望する動作を認識する(瞬き、ゆびぱっちん とか)
・タブレット用に作成したアプリとの連動を行う
#センサー類
資料より実際のセンサーについて
Pepper製品仕様
頭:マイク×4、RGBカメラ×2、3Dセンサー×1、タッチセンサー×3
胸:ジャイロセンサー×1
手:タッチセンサー×2
脚:ソナーセンサー×2、レーザーセンサー×6、バンパーセンサー×3、ジャイロセンサー×1、赤外線センサー×2
周囲の環境を把握する3Dカメラ
障害物を回避し安全に移動できる超音波システム
##タッチセンサー
頭3ヶ所と手の甲2ヶ所
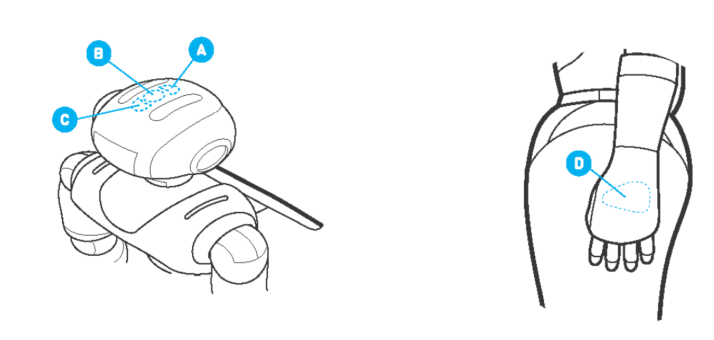
※公式取り扱い説明書画像より
ハードの仕様を見ると、タッチの強弱は判定できないようです。
Switches are simple sensors that return a 2-state float value 0.0 (unpressed) or 1.0 (pressed). Beware that the value is read only every 10ms, and very fast change may be unseen.
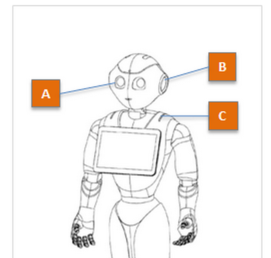
##視覚・対物感知センサー
頭部のカメラ・3Dセンサーと脚部のバンパー・ソナー・赤外線・レーザー
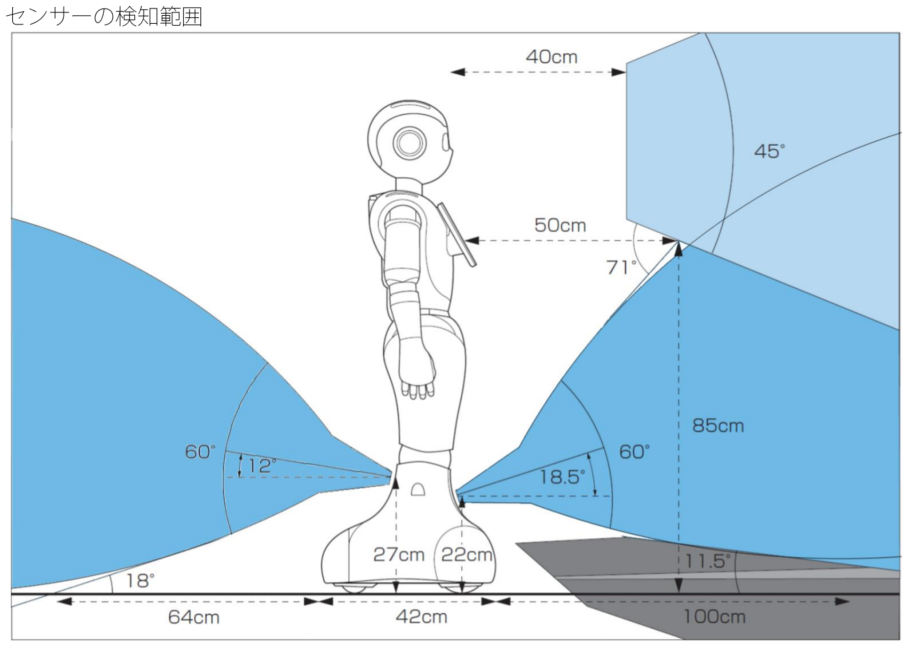
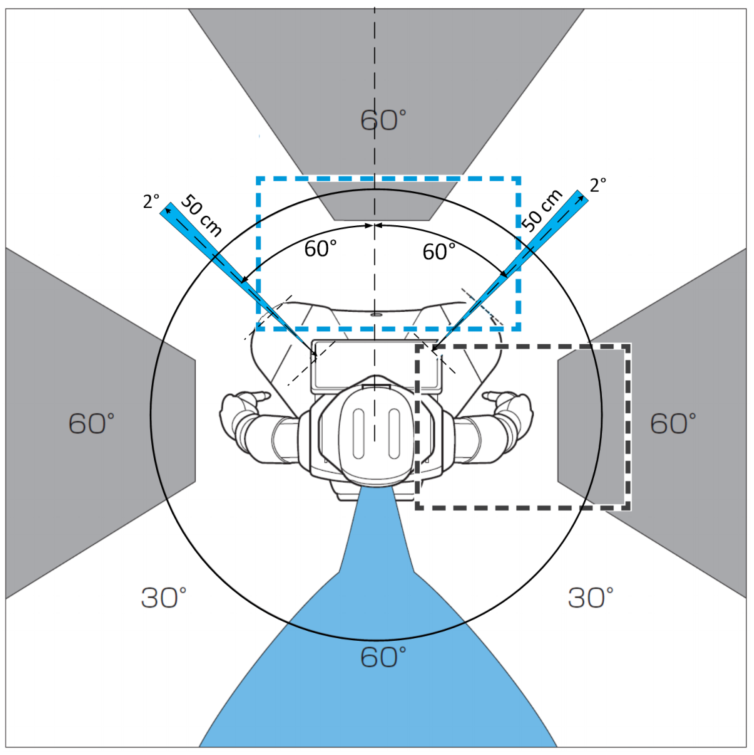
※公式取扱説明書画像より
カメラは目の上の部分と口部分の上下2ヶ所
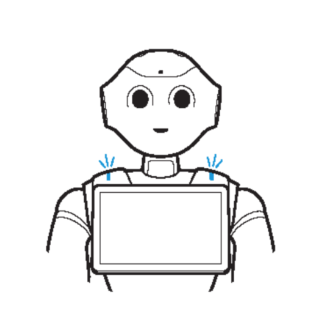
##聴覚・音声センサー
頭部にマイクが4ヶ所
頭頂部部分に集中してます。
#アウトプット(コミュニケーション)方法
スピーカー
スピーカーは口じゃなくて耳の部分みたいです。
Pepperの一番のコミュニケーション方法ですよね。
ジェスチャー
LEDランプ
※公式取扱説明書画像・ Aldebaran documentationより
目は8か所、耳は10か所のLEDポイントがあり、複雑な色表現も可能なようです。
肩部分にはポイントの表記がないので、おそらく1色のみの表現だと思われます。
#NAOqi センサー関連API
Aldebaran NAOqi Sensors & LEDs
Aldebaran Pepper - Actuator & Sensor list
#その他参考
[Aldebaran documentationo Pepper TechnicalOverView]
(https://cloud.aldebaran-robotics.com/naoqidoc/2-3/family/pepper_technical/index_pep.html)
#その他メモ
常時撮影可能なカメラという意味では、ARの出番ではないか?