やりたい事
vl53l1xをESP32に複数つないで距離を同時に取得します。
今回はESP32のMicropythonを使用しますが、RaspberryPiやRaspberryZeroでも使用可能です。

vl53l1xはレジスタの内容を変更する事でスレーブアドレスを変更できる.
(レジスタマップはデータシートに乗ってなかった)
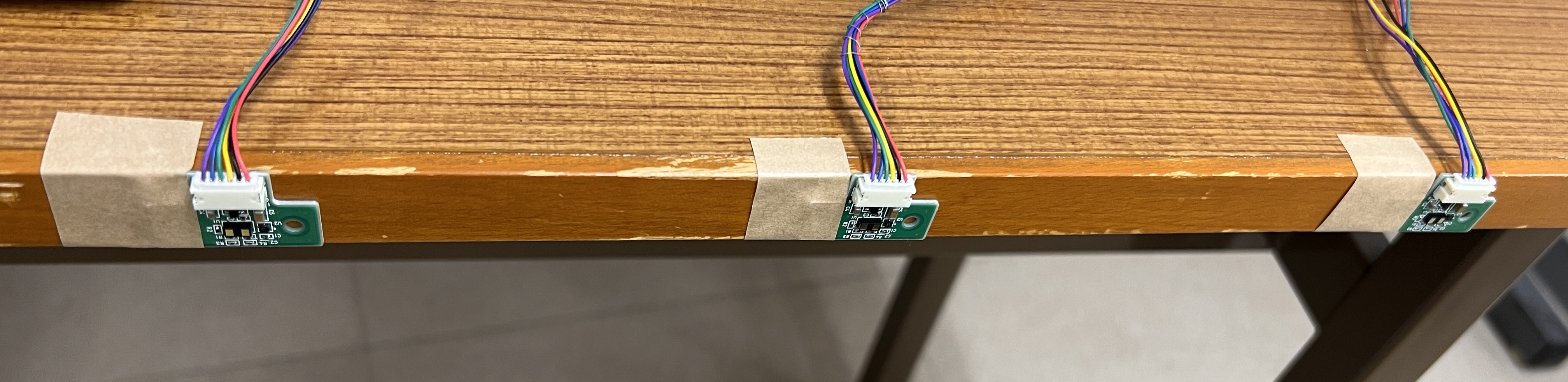
つなぎ方
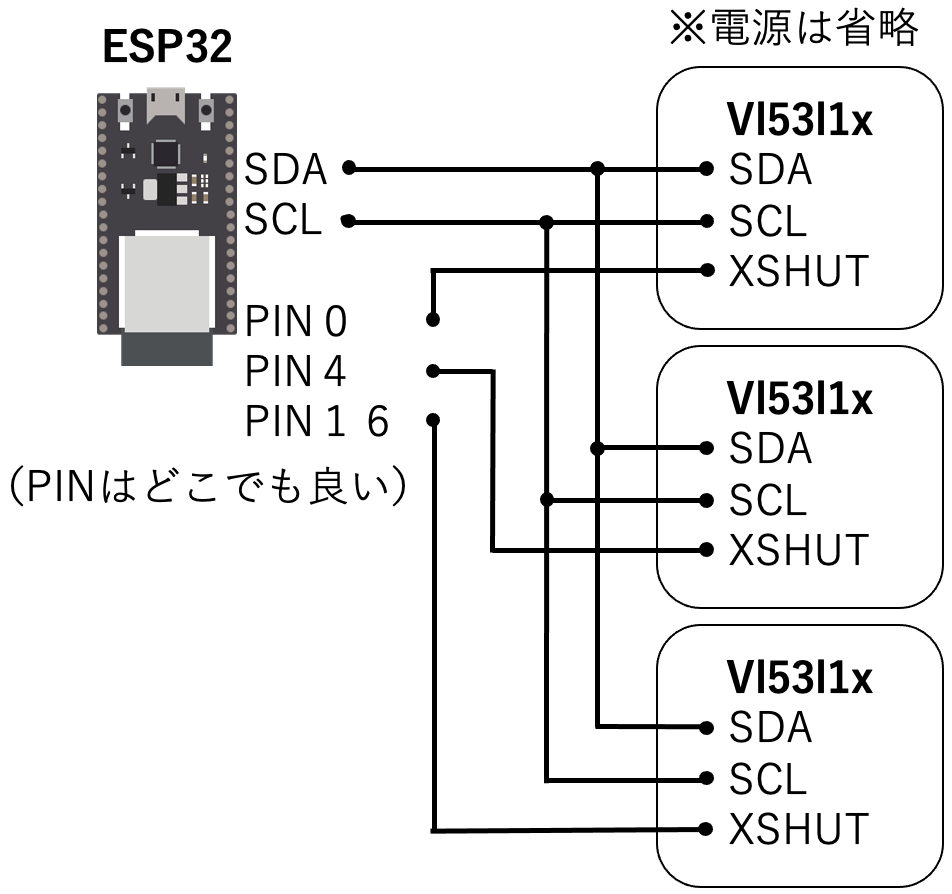
XSHUTピンはGNDに接続するとスリープモードになる.
説明ではPIN 0,4,16を使用
アドレスの設定手順
vl53l1xは電源投入または,スリープモード復帰時のアドレスは41(0x28)になる.
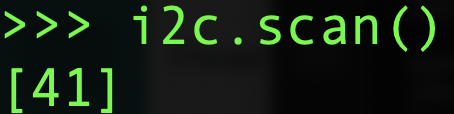
ここでは、I2Cで接続されたすべての距離センサをスリープモードにして、1台づつ起動とアドレスの変更を行う。
1. アドレスを変更する前にXSHUTピンに接続されているすべてのピンをLOWにする.

2. 1台のXSHUTピンをHIGHにする.

3. アドレス41のアドレスを変更する.

2. 次のXSHUTピンをHIGHにする.
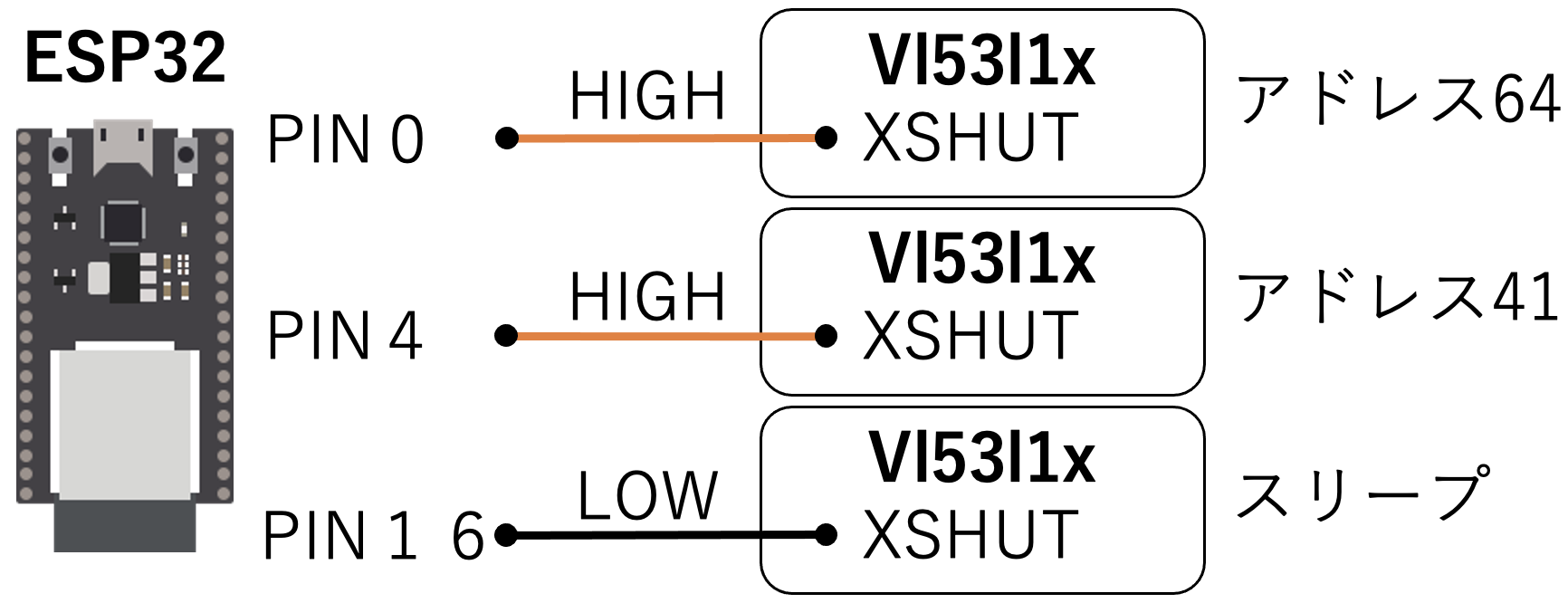
3. アドレス41のアドレスを変更する.

2と3を繰り返す.
すべてのセンサのアドレスが変更できるまで2と3を繰り返す.
プログラム
配線方法は上記を参照
from machine import I2C,Pin
from vl53l1x import VL53L1X
import time
""" パラメータ """
# i2c関係
I2C_SCL_PIN = 22
I2C_SDA_PIN = 21
# XSHUTに接続するPin番号
x_suht_pin = [0,4,16]
""" パラメータ(終わり) """
class VL53L1X_S():
# 複数の距離センサを取り扱うクラス
def __init__(self, i2c, x_suht_pin):
self.vl53l1x_s = []
self.pin_s = []
# Pinの初期化
for pin_no in x_suht_pin:
self.pin_s.append(Pin(pin_no, Pin.OUT))
self.pin_s[-1].value(0)
# 各センサの初期化(アドレス変更)
for i in range(len(x_suht_pin)):
time.sleep(0.2)
self.pin_s[i].value(1)
self.vl53l1x_s.append(VL53L1X(i2c))
self.vl53l1x_s[-1].writeReg(0x0001, 64+i & 0x7F)
self.vl53l1x_s[-1].address = 64 + i
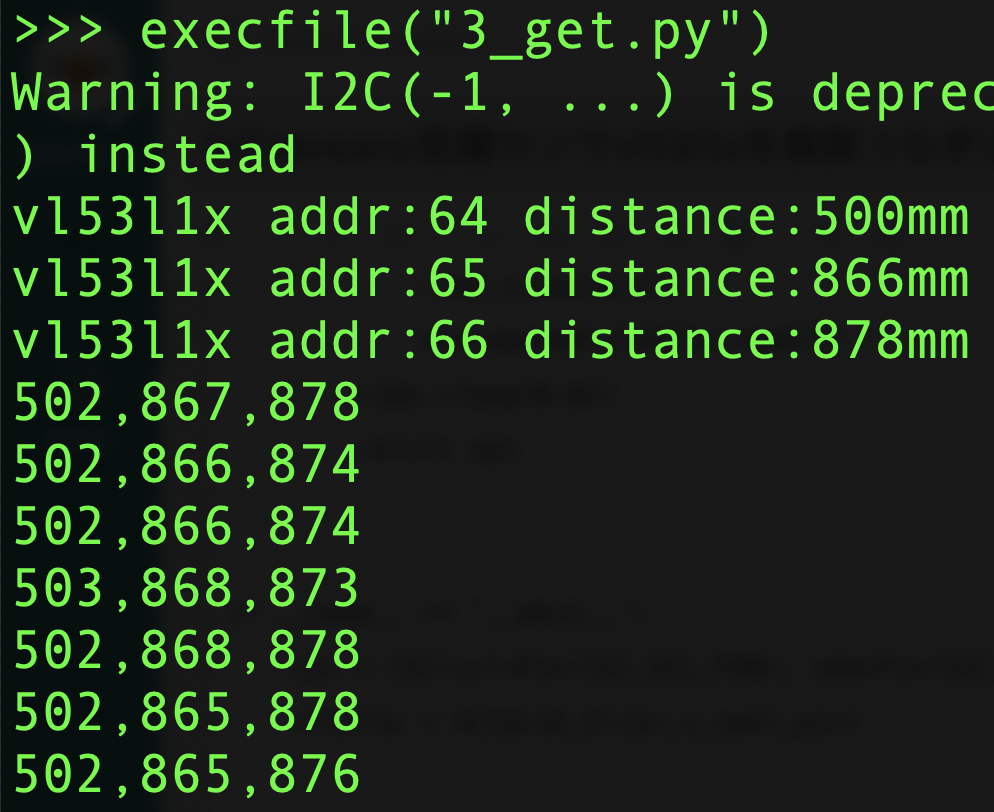
print("vl53l1x addr:%d distance:%dmm" % (64 + i , self.vl53l1x_s[-1].read()))
def read_sensors(self):
# データを配列で返却(3台の場合100msで返却)
out = []
for vl53l1x in self.vl53l1x_s:
time.sleep(0.03)
out.append(vl53l1x.read())
time.sleep(0.01)
return out
if __name__ == '__main__':
i2c = I2C(scl=Pin(I2C_SCL_PIN), sda=Pin(I2C_SDA_PIN))
vl53l1x = VL53L1X_S(i2c,x_suht_pin)
while True:
data = vl53l1x.read_sensors()
print("%d,%d,%d" % (data[0],data[1],data[2]))
実行
上記のプログラムを実行すると,0.1秒に1回,すべてのセンサの値を表示する.
終わりに
ドローンやロボットを作成するとき、複数のセンサを1つのマイコンに取り付けることがあると思います。
そのような場合に役に立つと嬉しいです!