ROSでのルンバの制御はググればいろいろ情報が出てきますが、若干詰まった部分もあったので備忘録的な記事。

環境とかいろいろ
・ラズパイ:Raspberry Pi3 Model B
・OS:Ubuntu Mate 16.04
・ROS:kinetic
・るんば:Roomba 621
・るんば制御用パッケージ:create_autonomy
・ノートPC:thinkpad x1, ubuntu 16.04
ラズパイのセットアップ
SDカードにubuntu-mateのイメージを書き込み
今回はROSメインでルンバを制御するのでOSはUbuntu-Mateを入れます。
下の記事を参照。操作はubuntu16.04が入ったthinkpad上で行っています。
<Raspberry Pi3にUbuntu Mateをインストール>
https://ubuntu-mate.org/download/
・Ubuntu Mateのイメージをダウンロード、解凍。
・SDカードを差し込む
・SDカードのマウント先を確かめる
$ lsblk
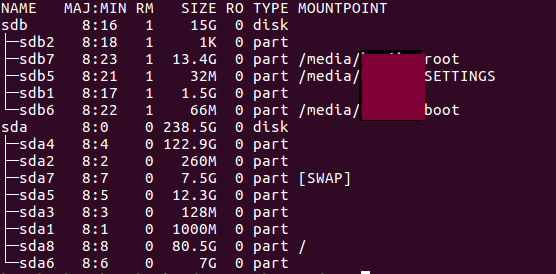
16GのSDカードなので、/dev/sdbかな。
で、SDカードにosのイメージを書き込み。
$ sudo ddrescue -D --force ~/Downloads/ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img /dev/sdb
・sdカードをラズパイに刺して起動
・とりあえずsshを動かしておく
$ sudo apt update
$ sudo apt upgrade
$ sudo apt-get install openssh-server
$ sudo /etc/init.d/ssh restart
・起動時にsshを自動起動させる
$ sudo systemctl enable ssh
るんばのハードセットアップ
下の記事が最強だったので、とくに困らず。
<ルンバをRaspberry Piを使ってROSでコントロールできるように改造してみた(半田付け無しでOK)>https://karaage.hatenadiary.jp/entry/2017/05/12/073000
この記事はraspbian用なのですが、今はラズパイ用のubuntu mateが公式で出されているので、そちらを使います。記事がとても読みやすいので、raspiの場合は〜と書いてある部分を無視して進めばとりあえずok。
るんば制御ノードのインストール
これも上の記事を参考に行います。
流れとしては
・rosをインストール
・ルンバ用のrosパッケージの"create_autonomy"をインストール、ビルド、ソースする
$ cd ~/catkin_ws/src
$ git clone https://github.com/AutonomyLab/create_autonomy.git
$ cd ~/catkin_ws
$ catkin_make -j2
$ source devel/setup.bash
ラズパイ3では通常4コア並列のビルドが走るみたいですが、メモリ不足でフリーズすることが多いので
-j2オプションを2コアに下げてます。
※catkin build推奨とありましたが、catkin_makeでもokでした。
・USBシリアル変換コネクタを通じてルンバとPCをつなぐ
・USBのアクセス権を付与
$ sudo chmod a+rw /dev/ttyUSB0
※毎回ttyUSB0するもの面倒なので、udevの設定がおすすめ。
(参考:https://qiita.com/caad1229/items/309be550441515e185c0)
・create_autonomyを実行
$ roslaunch ca_driver create_2.launch
※USBのアクセス権を与え忘れて、何度かエラーになったので注意。
最初はうまくるんばと繋がらず、ググりながらボーレートの値とかをいじっていたのですが、
シリアル通信のコネクタを付け間違えたいたのが原因でした。
RxDが受信、TxDが送信なんですね。シリアル通信したの初めてだったので、RxDをそのままRxDに繋いでました。
PS4コントローラをubuntuに繋ぐ
PS4も下の記事を参考にセットアップ。
<ROSでPS4のコントローラ(DualShock4)を使う方法>
http://cryborg.hatenablog.com/entry/2016/09/19/185501
・ROS用のPS4コントローラドライバ
$ sudo apt-get install ros-<DISTRO>-joy
・bluetooth通信用のドライバ
$ sudo pip install ds4drv
・PS4コントローラと接続。USB接続の場合は直挿し。bluetoothの場合は
$ sudo ds4drv
の後に、PS4のSHAREとPSボタンを長押し。
・PS4の接続先を確認
$ cat /proc/bus/input/devices | grep Sony -A 10 -B 2
手元のPCではUSBでPS4コントローラをつなぐと/dev/input/js1に、bluetoothでつなぐと/dev/input/js0に繋がる。
USBの時はジャイロとかのセンサー系の値と、スティックとボタンのデータがそれぞれjs0とjs1に別々に来ているっぽい。
今回はbluetooth接続メインで行くので、rosノードの引数にjs0を引数で与える。
・joyノードを起動
$ rosrun joy joy_node _dev:=/dev/input/js0
でok.
PS4の入力をルンバへ送る
先にインストールしたPS4の値を取り出すrosノードは、sensor_msgs::Joyというメッセージ型でトピックを出すけど、ルンバに送りたいトピックはgeometry_msgs::Twistなので、この変換ノードを作ります。
調べたら下の記事が出てきたけど、情報が古いのでセンサーの型が違うみたい。
<PS3のコントローラーを使う>
http://ros-robot.blogspot.com/2010/01/ps3.html
なので結局、参考にしながら自分で作成。
https://github.com/TakaHoribe/joy_to_twist
js0になるかjs1になるかの違いでjoyのメッセージが違うようなので、引数としてmodeが0か1かで分ける。
最初はUSB接続かbluetooth接続かでメッセージ型が違うのかとも思ったけど、ノートPC(ubuntu)でつなぐのとラズパイ(ubuntu mate)でつなぐのとで、同じUSB接続でも違いが出たので、ここは毎回確認しないとダメそう。
$ cd ~/catkin_ws/src
$ git clone https://github.com/TakaHoribe/joy_to_twist.git
$ cd ~/catkin_ws
$ catkin_make
js1接続の時はjoy.axesの中身が
[0] L stick horizontal
[1] L stick vertical
[2] L2
[3] R stick horizontal
[4] R stick vertical
[5] R2
という並び順だったけど、js0の場合は
[0] L horizontal
[1] L vertical
[2] R horizontal
[3] L2
[4] R2
[5] R stick vertical
となっている。。。(なぜ?)
実際に動かす
1. ラズパイを起動してsshで繋ぐ
2. PS4コントローラをつなぐ:ps4とのbluetooth通信ドライバを起動
$ sudo ds4drv
ps4コントローラのSHAREとPSボタンを同時に長押しでペアリングモードにして接続。
接続先を確認する。
$ cat /proc/bus/input/devices
3. joyノードを起動(_devには上で確認した接続先を指定)
$ rosrun joy joy_node _dev:=/dev/input/js0
4.ルンバの電源を入れてから、ルンバ制御パッケージを起動
$ sudo chmod a+rw /dev/ttyUSB0 #USBの接続権限
$ roslaunch ca_driver create_2.launch
5. twist変換ノードを起動
$ rosrun joy_to_twist joy_to_twist _mode:=0
6. 遊ぶ
その他
USBカメラで画像を取得
会社の先輩から頂いたUSBカメラ(ありがとうございます)をラズパイに繋いで設定。
UVCに対応しているので一瞬で出来た。
以下の記事を参考
<ROS KineticでのUSBカメラ接続とキャリブレーションまで>
https://qiita.com/proton_lattice/items/aa805b28700575ba5ed3
・USBカメラをつける
・USBカメラが接続されているか確認
$ lsusb
・rosのusbカメラ用パッケージをインストール
$ sudo apt-get install ros-kinetic-uvc-camera
・起動
$ roscore
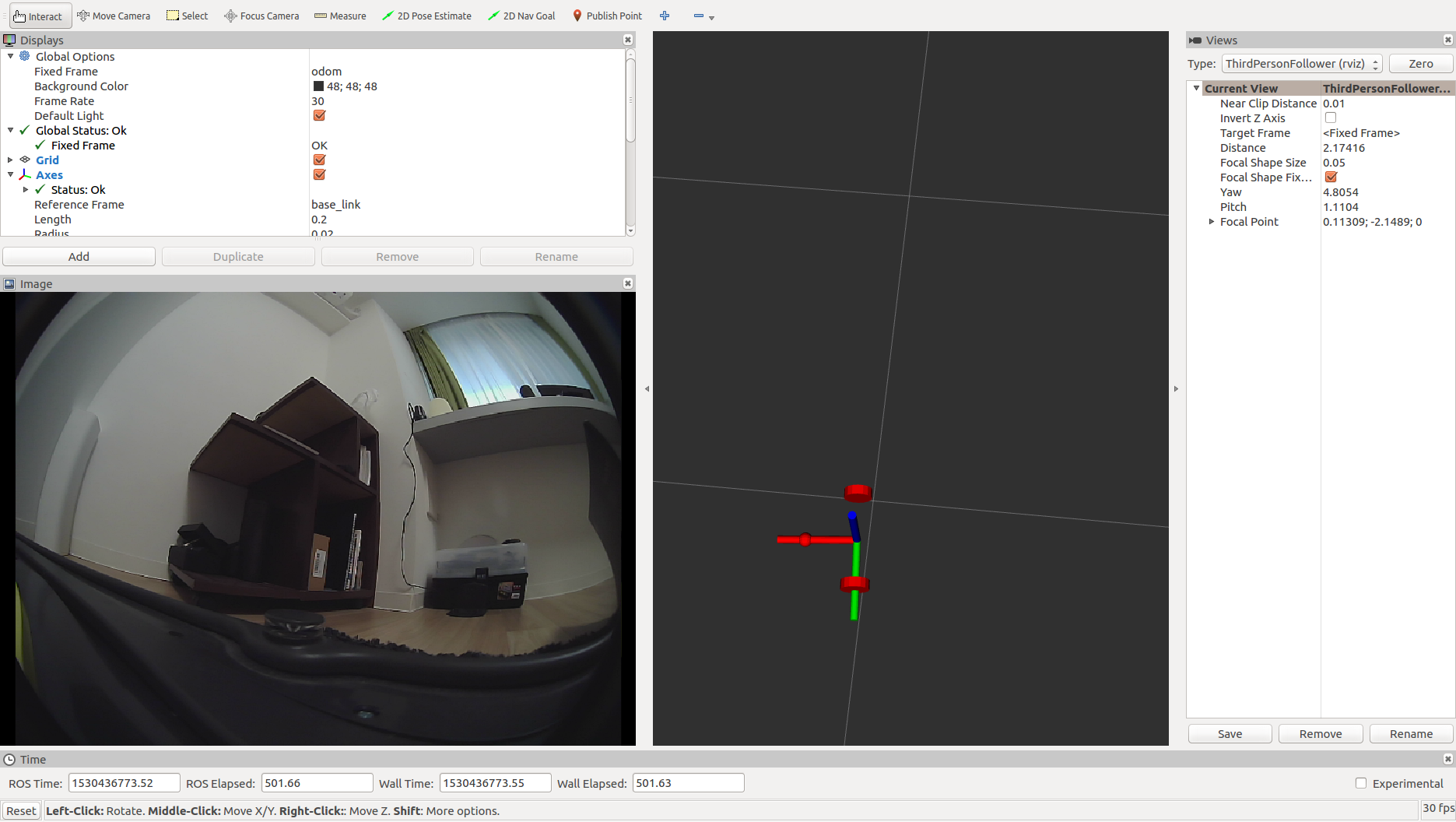
$ rosrun uvc_camera uvc_camera_node
/image_rawというtopicが出ていればok. rvizで確認できる。
ノートPCにトピックを送る。
ネットワーク間でのトピック通信を行う。
ノートPCからsshでラズパイに入って、ROS_HOSTNAMEとROS_MASTER_URIを設定する。
$ ssh <IP_RASPI3>
$ export ROS_HOSTNAME=<IP_RASPI3>
$ export ROS_MASTER_URI=http://<IP_RASPI3>:11311
ノートPC側でも同様にROS_MASTER_URIをラズパイのipアドレスに設定する。
※各ターミナルで実行する必要がある。面倒だったら~/.bash.rcに書き込む。
残課題
・usbカメラとルンバコントロールのノードを同時に起動すると、/joyにノイズが入って、ルンバがたまにカタカタする。
・顔認識させたいけどラズパイで動くのかな?
メモ
ds4drvが上手く動かないことがあった。こんなエラーを吐く。
ImportError: /usr/local/lib/python2.7/dist-packages/evdev/_ecodes.so: nonzero padding in e_ident
ds4drvを再インストールしたら復活した。
$ sudo -H pip --no-cache-dir install -I ds4drv