はじめに
100行のPythonスクリプトでARを作ります。
(正確には98行です)
本記事ではこのスクリプトを**100行AR**と呼称します。
デモ動画
100行ARのデモ動画です。
環境
以下の環境で実行しました。
- Windows11(カメラ付き)
- Python 3.10.0
- OpenCV 4.5.4
環境のセットアップ
Windows11環境のセットアップ方法です。
Pythonをインストールする
以下のサイトからインストーラをダウンロードしインストールします。
インストーラの以下の画面で、Add Python 3.10 to PATH にチェックを入れるとPythonに関するパスがWindowsの環境変数に追記されます。

powershellを開き、pythonのバージョンが表示されれば成功です。
PS C:\> python -V
Python 3.10.0
PS C:\>
pipをアップグレードする
OpenCVをインストールする前に、pipをアップグレードしておきます
PS C:\> python.exe -m pip install --upgrade pip
念のため、バージョンを確認し最新であることを確認します。
PS C:\> pip -V
pip 21.3.1 from C:\Users\hoge\AppData\Local\Programs\Python\Python310\lib\site-packages\pip (python 3.10)
PS C:\>
OpenCVをインストールする
OpenCVをインストールします。
PS C:\> pip install opencv-contrib-python==4.5.4.60
以下のように、OpenCVのバージョンが確認できれば成功です。
PS C:\> python
Python 3.10.0 (tags/v3.10.0:b494f59, Oct 4 2021, 19:00:18) [MSC v.1929 64 bit (AMD64)] on win32
Type "help", "copyright", "credits" or "license" for more information.
>>> import cv2
>>> cv2.__version__
'4.5.4'
>>> exit()
PS C:\>
以上で環境のセットアップが完了しました。
100行ARのスクリプトソース
お待たせしました 100行ARのスクリプトソース(100ar.py)です。Powershellで python 100ar.py と実行すれば処理が開始されます。qで停止します。
import cv2
import cv2.aruco as aruco
import numpy as np
targetVideo = 0 # カメラデバイス
cap = cv2.VideoCapture( targetVideo )
# 立方体の座標
cube = np.float32([[0.025,-0.025,0], [-0.025,0.025,0], [0.025,0.025,0], [-0.025,-0.025,0],
[0.025,-0.025,0.05], [-0.025,0.025,0.05], [0.025,0.025,0.05], [-0.025,-0.025,0.05]
])
while cap.isOpened():
ret, img = cap.read()
if img is None :
break
scale_percent = 50 # percent of original size
width = int(img.shape[1] * scale_percent / 100)
height = int(img.shape[0] * scale_percent / 100)
dim = (width, height)
# Check if frame is not empty
if not ret:
continue
# Set AR Marker
aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_4X4_50)
parameters = aruco.DetectorParameters_create()
corners, ids, _ = aruco.detectMarkers(img, aruco_dict, parameters=parameters)
center = (width, height)
focal_length = center[0] / np.tan(60/2 * np.pi / 180)
camera_matrix = np.array(
[[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]], dtype = "double"
)
dist_coeffs = np.zeros((4,1)) # レンズ歪みなしの設定
if len(corners) > 0:
for i, corner in enumerate(corners):
rvecs, tvecs, _objPoints = aruco.estimatePoseSingleMarkers(corner, 0.05, camera_matrix, dist_coeffs)
tvec = np.squeeze(tvecs)
rvec = np.squeeze(rvecs)
rvec_matrix = cv2.Rodrigues(rvec) # 回転ベクトルからrodoriguesへ変換
rvec_matrix = rvec_matrix[0] # rodoriguesから抜き出し
# cubeの座標をARマーカに合わせる
imgpts, jac = cv2.projectPoints(cube, rvecs, tvecs, camera_matrix, dist_coeffs)
outpts = []
for lp in imgpts:
lp_int = lp.astype(np.int64)
outpts.append( tuple(lp_int.ravel()) )
# ARマーカに合わせたcube座標を描画:底面
cv2.line(img,outpts[0],outpts[2],(255,0,0),2)
cv2.line(img,outpts[1],outpts[2],(255,0,0),2)
cv2.line(img,outpts[1],outpts[3],(255,0,0),2)
cv2.line(img,outpts[3],outpts[0],(255,0,0),2)
# ARマーカに合わせたcube座標を描画:上面
cv2.line(img,outpts[4],outpts[6],(0,255,0),2)
cv2.line(img,outpts[5],outpts[6],(0,255,0),2)
cv2.line(img,outpts[5],outpts[7],(0,255,0),2)
cv2.line(img,outpts[7],outpts[4],(0,255,0),2)
# ARマーカに合わせたcube座標を描画:支柱
cv2.line(img,outpts[0],outpts[4],(0,0,250),2)
cv2.line(img,outpts[1],outpts[5],(0,0,250),2)
cv2.line(img,outpts[2],outpts[6],(0,0,250),2)
cv2.line(img,outpts[3],outpts[7],(0,0,250),2)
# ARマーカに合わせたcube座標を描画
cv2.circle(img, outpts[0], 10, (0, 240, 160), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '0', outpts[0], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[1], 10, (40, 200, 200), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '1', outpts[1], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[2], 10, (80, 160, 240), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '2', outpts[2], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[3], 10, (120, 120, 40), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '3', outpts[3], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[4], 10, (160, 80, 80), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '4', outpts[4], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[5], 10, (200, 40, 120), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '5', outpts[5], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[6], 10, (0, 0, 255), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '6', outpts[6], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.circle(img, outpts[7], 10, (0, 255, 255), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '7', outpts[7], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
cv2.imshow('frame', img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
実行例です。
PS C:\Users\hoge\100ar> dir
ディレクトリ: C:\Users\hoge\100ar
Mode LastWriteTime Length Name
---- ------------- ------ ----
-a---l 2021/11/23 11:34 4732 100ar.py
PS C:\Users\hoge\100ar> python .\100ar.py
仕組み
立方体の座標算出
100行ARでの立方体の座標算出の流れを紹介します。
(Fig-1)の向かって左が3次元空間に配置したARマーカー、向かって右がカメラで撮影した映像です。
(Fig-1) 3次元空間のARマーカーとカメラ映像
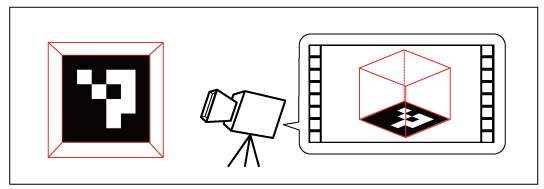
(Fig-2)は、(Fig-1)の3次元空間に配置したARマーカーに対しカメラの撮影位置を算出した結果を図示したものです。
カメラで撮影した映像から3次元空間に配置したARマーカーを撮影した**カメラ位置**の算出には、estimatePoseSingleMarkers()を使用します。
正確には、ARマーカーとカメラ位置の相対的な位置関係を算出します。原点(0,0,0)はARマーカーの中点のようです。

(Fig-2) カメラ位置の算出
(Fig-2)の処理は以下になります。以降の変数tvec,rvec,rvec_matrixの処理は立方体の算出で使用します。
rvecs, tvecs, _objPoints = aruco.estimatePoseSingleMarkers(corner, 0.05, camera_matrix, dist_coeffs)
tvec = np.squeeze(tvecs)
rvec = np.squeeze(rvecs)
rvec_matrix = cv2.Rodrigues(rvec) # 回転ベクトルからrodoriguesへ変換
rvec_matrix = rvec_matrix[0] # rodoriguesから抜き出し
estimatePoseSingleMarkers()の詳細はこちら
ここまでで、(Fig-3)のように撮影したARマーカーの映像からカメラ位置が算出できました。

(Fig-3) 算出されたカメラ位置
ここからは立方体に対する処理になります。
(Fig-4)は、向かって左が3次元空間に配置した立方体、中央のカメラがさきほどestimatePoseSingleMarkers() で算出したカメラの位置、向かって右がそのカメラで撮影した映像です。
算出したカメラ位置から立方体を撮影するとどのような座標になるかを projectPoints() で算出します。

(Fig-4) 3次元空間の立方体とカメラとカメラ映像
(Fig-4)の3次元空間に配置した立方体の座標は以下です。
# 立方体の座標
cube = np.float32([[0.025,-0.025,0], [-0.025,0.025,0], [0.025,0.025,0], [-0.025,-0.025,0],
[0.025,-0.025,0.05], [-0.025,0.025,0.05], [0.025,0.025,0.05], [-0.025,-0.025,0.05]
])
(Fig-4)のそのカメラで撮影した映像が以下です。正確には映像ではなく座標です。
変数 cube が変換前の立方体の座標です。変換後の座標は変数 imgpts に格納されます。
変数 cube には3次元の座標が、imgpts には2次元の座標が格納されています。
# cubeの座標をARマーカに合わせる
imgpts, jac = cv2.projectPoints(cube, rvecs, tvecs, camera_matrix, dist_coeffs)
projectPoints()の詳細はこちら
(Fig-5)のように立方体の底面がARマーカーと一致するようにしています。
(Fig-5) ARマーカーと立方体
立方体の描画
座標変換ができれば、あとは描画するだけです。スクリプトソースの以下のところから描画処理になります。
# ARマーカに合わせたcube座標を描画:底面
cv2.line(img,outpts[0],outpts[2],(255,0,0),2)
cv2.line(img,outpts[1],outpts[2],(255,0,0),2)
cv2.line(img,outpts[1],outpts[3],(255,0,0),2)
cv2.line(img,outpts[3],outpts[0],(255,0,0),2)
以下は、立方体のポイントに円と数字0を描画しています。
# ARマーカに合わせたcube座標を描画
cv2.circle(img, outpts[0], 10, (0, 240, 160), thickness=-1, lineType=cv2.LINE_AA)
cv2.putText(img, '0', outpts[0], cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 0), thickness=2)
立方体の各ポイントに割り振った数値は(Fig-6)の通りです。

(Fig-6) 立方体の模型
余談ですが、(Fig-6)の模型は今回のプログラムを作ために作成しました。紙に絵を描いていたのですが、分けがわからなくなったので模型を作りました。
100行ARは以上です。
可読性を高めるため描画処理を冗長にしたため100行になりましたが、最適化すればもっと短いプログラムになりそうです。
※補足 ARマーカーの作成はこちらが参考になるかも
さらなる高みへ
ここからは、100行ARを改良するとどのように進化するかを紹介します。
箱を描画
立方体の各面について、描画順序を判定する処理を追加しました。これにより各面に画像をマッピングしても箱の形状を維持できるようになりました。
凹むAR
画像処理を追加し、凹むエフェクトができました。
仮想の穴
ストリーミングと組み合わせ穴が空いたようなエフェクト(仮想穴)ができました。この仮想穴は、私が開発を続けているもので ウソ穴 と命名しています。
2壁貫通の仮想穴
複数のストリーミングとAR処理のタイミングを追加し、2つの壁を貫通する仮想穴ができました。デモ動画では仮想の穴は2つですが、理論的には無数の壁を貫通できます。
(処理量が多すぎるためか、動画がひどくコマ落ちしています。処理の無駄を省き最適化したいところ)
おわりに
100行ARのスクリプトソースを紹介しました。
100行ARでは、立方体の座標を使用しましたが、今後は3Dオブジェクトデータの描画にも挑戦したいと思います。