環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
rvizの左右でimageを表示したりするウィンドウのことをpanelといいます。このpanelはpluginなので自作することが出来ます。
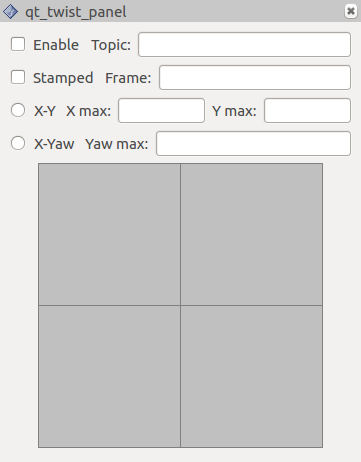
今回はtwistを送る以下のようなpanelを作成します。
- enableをチェックするとpublishが開始
- Topic欄でTopic名を設定できる。
- チェックをするとTwistStampedになる。
- linear.X、linearYを出す平行移動モードとlinear.X、angular.Z(=Yaw)を出す差動2輪モードを切り替えられる。
- X、Y、Yawの最大値をそれぞれ設定できる。
- タッチ画面でマウスでクリック&ドラッグをすることで値を決める。
- 設定できない項目はグレーアウトする。
- publish rateは10Hで固定
ソースコード
touch panel widget
タッチすると四角形中の座標を返すというQtのwidgetを記述します。「72 Qtでタッチパッドを作る」で製作したものとほぼ同じものです。
qt_touch.h
qt_touch.cpp
twist panel
plugin_lecture/src/qt_twist_panel.h
# ifndef Q_MOC_RUN
# include <ros/ros.h>
# include <rviz/panel.h>
# include <string>
# endif
# include <QLineEdit>
# include <QVBoxLayout>
# include <QHBoxLayout>
# include <QLabel>
# include <QCheckBox>
# include <QLineEdit>
# include <QRadioButton>
# include <QButtonGroup>
# include <QTimer>
namespace plugin_lecture
{
class TwistPanel : public rviz::Panel
{
Q_OBJECT
public:
TwistPanel(QWidget* parent = 0);
~TwistPanel();
virtual void load(const rviz::Config& config);
virtual void save(rviz::Config config) const;
public Q_SLOTS:
void tick();
public:
// The ROS node handle.
ros::NodeHandle nh_;
// The ROS publisher for the command velocity.
ros::Publisher twist_publisher_;
QCheckBox* enable_check_;
QLineEdit* topic_edit_;
QCheckBox* stamped_check_;
QLineEdit* frame_edit_;
QRadioButton* radio1_;
QRadioButton* radio2_;
QLineEdit* max1_edit_;
QLineEdit* max2_edit_;
QLineEdit* max3_edit_;
TouchWidget* touch_;
bool pub_stamped_;
std::string pub_frame_;
};
} // namespace plugin_lecture
- Qtのビルドは少し複雑で、まずMOC(MetaObjectCompile)というものを行います。これはc言語のマクロの展開のようなものです。これとの兼ね合いでincludeのうちQtと関係ないものは
#ifndef Q_MOC_RUN~#endifで囲う必要があります。 - またROSのルールとしてプラグインはpackage名のnamespaceで囲う必要があります。その下ででtwistを送るpluginのクラスを作ります。
-
class qt_twist_panel: public rviz::Panelのようにrviz::Panelを継承したクラスを作成します。 - 実装はplugin_lecture/src/qt_twist_panel.cppで記述します。
- ここではコンストラクターで画面設定とQtimerの設定をしています。
- このプログラムではtick()が10Hzで呼ばれます。この中でメインの処理が行われています。
- save()とload()はrvizの画面設定の保存、読み出しの時に使われる関数です。ここで値の保存読み出しができます。値はQtの型のみが使用可能です(QStringは使えるが、std::Stringは使えない)。
- setEnabled()関数を使うことで各Widgetの表示をグレーアウト&不使用にできます。
設定の保存
rvizを開いたときにはウィンドウは初期状態で、使うためには毎回値を入れたりしないといけません。しかしrvizの保存機能を使えばrvizを起動したときに***.rvizファイルから設定を読み込むことができます。使い方は簡単で以下のようにsave(), load()関数をクラスに追加するだけです。
plugin_lecture/src/qt_twist_panel.cppの一部(save、load部分)
void qt_twist_panel::save( rviz::Config config ) const {
rviz::Panel::save( config );
config.mapSetValue( "Topic", topic_edit_->text());
config.mapSetValue( "Stamped", stamped_check_->isChecked());
}
void qt_twist_panel::load( const rviz::Config& config ) {
rviz::Panel::load( config );
QString tmp_text;
bool tmp_bool;
if( config.mapGetString( "Topic", &tmp_text ))topic_edit_->setText( tmp_text );
if( config.mapGetBool( "Stamped", &tmp_bool ))stamped_check_->setChecked( tmp_bool );
}
CMakeList.txt
Qt5のリンクのための記述を追加する必要があります。
plugin_lecture/CMakeLists.txtに追加
find_package(catkin REQUIRED COMPONENTS
rviz #この行を追加
)
set(CMAKE_AUTOMOC ON)
find_package(Qt5 ${rviz_QT_VERSION} EXACT REQUIRED
Core
Widgets
)
set(QT_LIBRARIES Qt5::Widgets)
add_definitions(-DQT_NO_KEYWORDS)
add_library(${PROJECT_NAME}
src/qt_twist_panel.cpp #この行を追加
src/qt_touch.cpp #この行を追加
)
target_link_libraries(${PROJECT_NAME}
${catkin_LIBRARIES}
${QT_LIBRARIES}
)
plugin_description.xml
rvizにpanel pluginがあることを通知するためのファイルです。
plugin_lecture/plugin_description.xml
<library path="lib/libplugin_lecture">
<class name="plugin_lecture/qt_twist_panel" type="plugin_lecture::qt_twist_panel" base_class_type="rviz::Panel">
<description>twist panel</description>
</class>
</library>
-
<library>タグのpath要素ではpluginの静的オブジェクトのパスを指定します。lib/lib<library名>と指定します。 -
<class>タグのname属性の値は自由に決めることが出来ますがROSパッケージ名/ライブラリ名とするのが慣例です。typeは名前空間/pluginのクラス名として、base_class_typeは継承している基底クラスの名前空間/pluginのクラス名とします。
package.xml
ビルドの依存と、plugin_description.xmlをrvizにリンクするための記述をします。
plugin_lecture/package.xml
<package>
<!-- 中略 -->
<build_depend>qtbase5-dev</build_depend>
<build_depend>rviz</build_depend>
<exec_depend>libqt5-core</exec_depend>
<exec_depend>libqt5-gui</exec_depend>
<exec_depend>libqt5-widgets</exec_depend>
<exec_depend>rviz</exec_depend>
<export>
<rviz plugin="${prefix}/plugin_description.xml"/> <!-- 追加 -->
</export>
</package>
ビルド
cd ~/catkin_ws
catkin_make
実行
各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
1つ目のウィンドウ
roscore
2つ目のウィンドウ
rviz
メニューバーの「Panel」->「add panel」で出てくるウィンドウで「qt_twist_panel」を選択します。
左下に今回作ったpanelが出てきました。
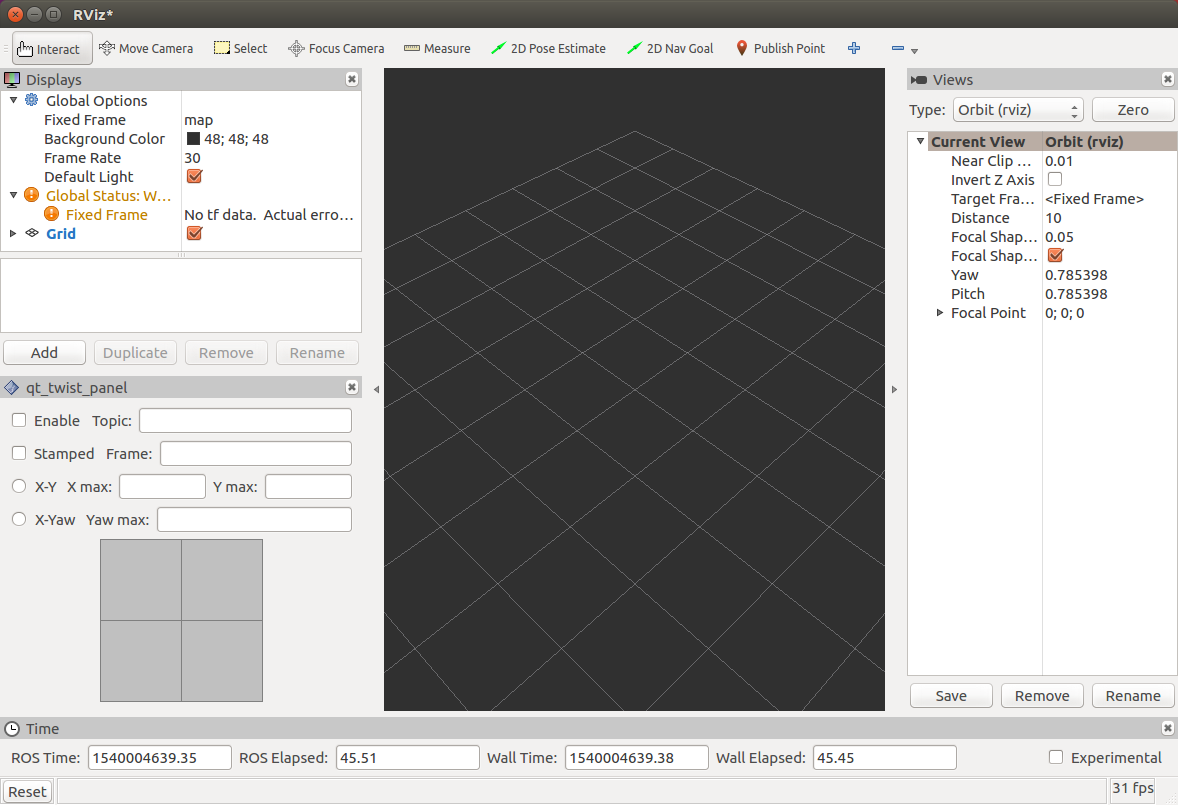
使うとtwistを送信します。
