環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
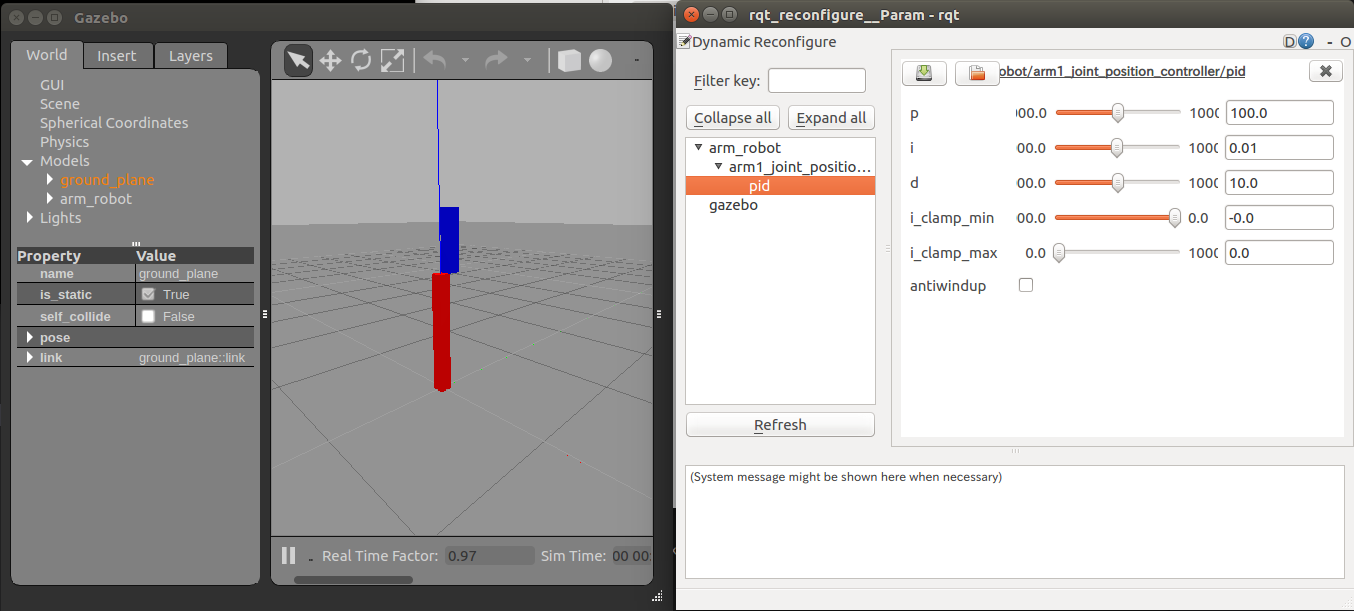
Dynamic Reconfigureはパラメーターを動的に変更するROSの仕組みです。この仕組みではGUIでパラメーターを変更しながらプログラムを実行することができます。ここまでもシミュレーションでros_controlのPIDゲインを変更するところで使用しています。以下のようにPID制御の各値をプログラム実行中にGUIから変更できます。
手順
以下のような4つの手順で設定します。
- cfgファイルの製作
- ROSノードの製作
- CMakeFileの設定
- 実行
cfgファイルの製作
ROSパッケージ下のcfgディレクトリにcfgファイルを製作します。
このファイルで動的に変更する変数の型と名前を決定します。
ソースコード
dynamic_reconfigureのmsgの定義
cfgなどのdynamic_reconfigureのメッセージ系はros_lecture_msgsに記述します。
cfgファイル
ros_lecture_msgs/cfg/Sample1.cfg
# !/usr/bin/env python
PACKAGE = "ros_lecture_msgs"
from dynamic_reconfigure.parameter_generator_catkin import *
gen = ParameterGenerator()
gen.add("int_param", int_t, 0, "An Integer parameter", 50, 0, 100)
gen.add("double_param", double_t, 0, "A double parameter", .5, 0, 1)
gen.add("str_param", str_t, 0, "A string parameter", "Hello World")
gen.add("bool_param", bool_t, 0, "A Boolean parameter", True)
size_enum = gen.enum([ gen.const("Small", int_t, 0, "A small constant"),
gen.const("Medium", int_t, 1, "A medium constant"),
gen.const("Large", int_t, 2, "A large constant"),
gen.const("ExtraLarge", int_t, 3, "An extra large constant") ],
"An enum to set size")
gen.add("size", int_t, 0, "A size parameter which is edited via an enum", 1, 0, 3, edit_method=size_enum)
exit(gen.generate(PACKAGE, "ros_lecture_msgs", "Sample1"))
注意点を細かく説明します。
- 2行目の
PACKAGE = "ros_lecture_msgs"ではパッケージ名を入れます。 -
gen.add(...)では動的に設定する変数を1つ1つ設定していきます。 - 最終行の
exit(gen.generate(PACKAGE, "ros_lecture_msgs", "Sample1"))では第2引数はパッケージ名、第3引数はこのファイル名から拡張子を除いた物にします。
実行フラグの追加
上記の.cfgファイルは実行フラグを立てる必要があります。
実行フラグの追加
roscd ros_lecture_msgs/cfg
chmod a+x sample1.cfg
ビルドの設定
ros_lecture_msgs/CMakeLists.txtに追加
# パッケージの依存を追加
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
dynamic_reconfigure #この行を追加
)
# configファイルを追加
generate_dynamic_reconfigure_options(
cfg/Sample1.cfg
)
dynamic_reconfigureを使う側の記述
ROSノード
adv_lecture/src/reconfigure1.cpp
# include <ros/ros.h>
# include <dynamic_reconfigure/server.h>
# include <ros_lecture_msgs/Sample1Config.h>
void callback(ros_lecture_msgs::Sample1Config& config, uint32_t level)
{
ROS_INFO("Reconfigure Request: %d %f %s %s %d", config.int_param, config.double_param, config.str_param.c_str(),
config.bool_param ? "True" : "False", config.size);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "reconfigure");
dynamic_reconfigure::Server<ros_lecture_msgs::Sample1Config> server;
dynamic_reconfigure::Server<ros_lecture_msgs::Sample1Config>::CallbackType f;
f = boost::bind(&callback, _1, _2);
server.setCallback(f);
ros::spin();
return 0;
}
- cfgで書いた設定をincludeします。
#include <ros_lecture_msgs/Sample1Config.h>の様に「(パッケージ名)/(cfgファイル名)Config.h」という名前のファイルをincludeします。 -
dynamic_reconfigure::Server<ros_lecture_msgs::Sample1Config> server;の様にしてdynamic_reconfigureのserverをインスタンス化します。またsetCallback()で値の変更が起きた時に呼ばれるcallback関数を登録します。
ビルドの設定
元のCMakeListに追加する内容を下に示します。
adv_lecture/CMakeLists.txtに追加
# パッケージの依存を追加
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
dynamic_reconfigure #この行を追加
)
# c++ ROSノードの追加
add_executable(reconfigure1 src/reconfigure1.cpp)
# c++ ros_lecture_msgsの子会作成したReconfigureへの依存の追加
add_dependencies(reconfigure1 ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
# c++ ROSノードのライブラリの追加
target_link_libraries(reconfigure1
${catkin_LIBRARIES}
)
launch
adv_lecture/launch/dynamic_reconfigure.launch
<launch>
<node name="reconf1" pkg="adv_lecture" type="adv_reconfigure" output="screen"/>
<node name="reconf2" pkg="adv_lecture" type="adv_reconfigure" output="screen"/>
</launch>
同じnodeを2つ立ち上げます。
実行
各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
実行
roslaunch adv_lecture dynamic_reconfigure.launch
rqtの実行
rosrun rqt_reconfigure rqt_reconfigure
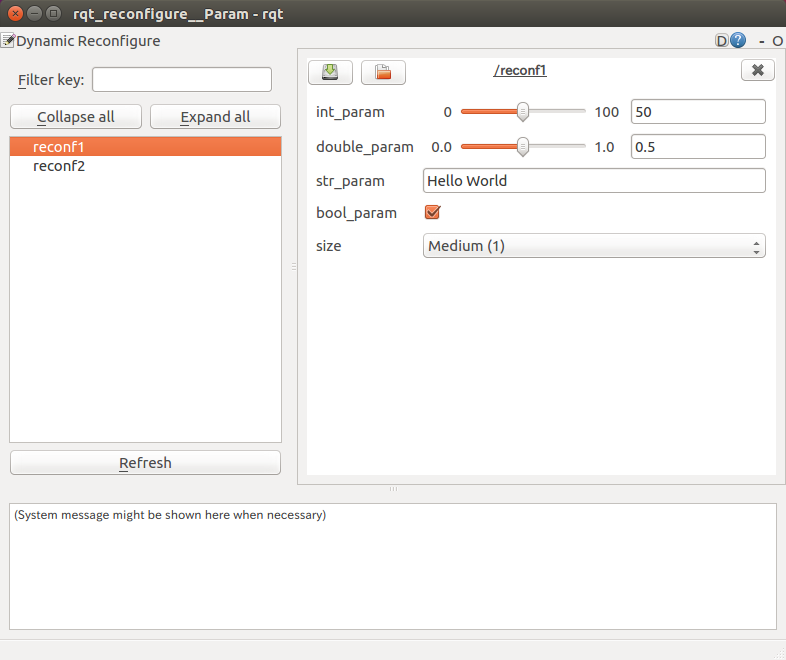
GUIで値の変更をすると以下のような出力が出ます。
[ INFO] [1588428717.061003188]: Reconfigure Request: 73 0.500000 Hello World True 1
参考
ROSwiki
日本語版は古かったり不十分であったりします。