Raspberry Pi 4 model Bを使った小型ロボット開発の準備を行います。
どんな準備が必要なのかを簡単にまとめます。
この記事は Tuton Advent Calender 2025 の7日目の記事です。
OSの準備
SDカードを用意し、OSのイメージを書き込みます。

次へを押すとこのような画面になり、いくつかの設定を行うことができます。
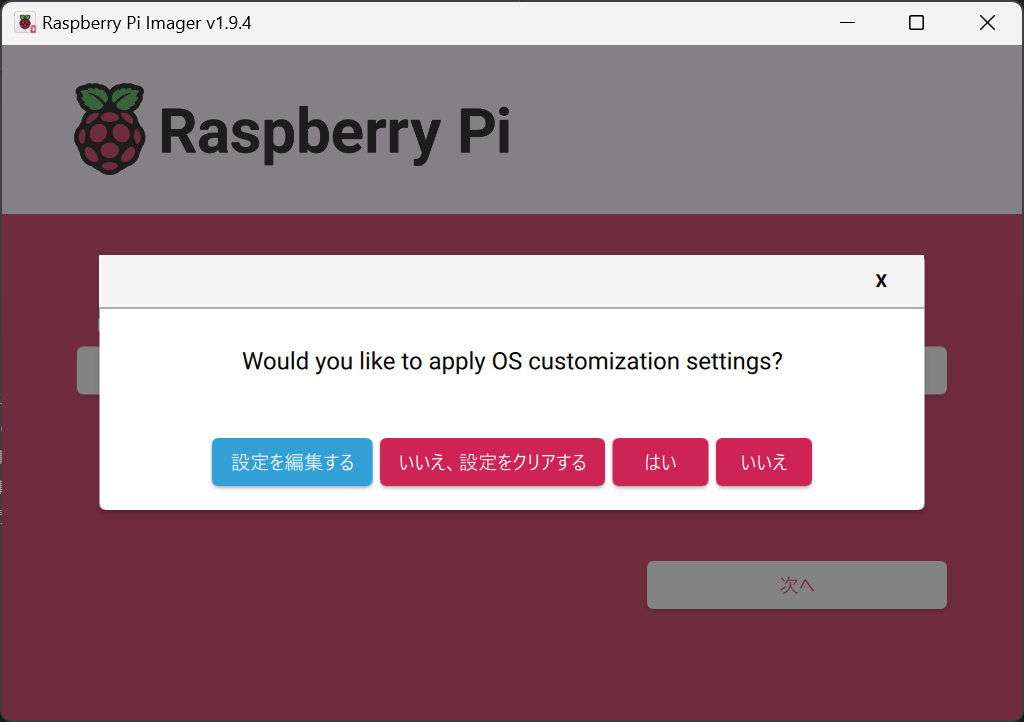
ユーザー名・パスワード、Wi-Fiなどを設定しておきます。ここでWi-Fiの設定をしておくことで、そのWi-Fiが飛んでいれば勝手に接続してくれるため最初から無線で開発することができます。
PCのモバイルホットスポットを登録しておくと、場所を選ばず開発できるので便利です。
書き込みが終わったらSDカードをRaspberry Piに差して電源を入れます。
ロボットに組み込む
Raspberry Pi 4 model Bは5Vピンから電源供給できます。3A供給できる電源を用意しておくとよいと思います(最大1.25~1.5A程度なので2Aくらいでもいいかもしれません)。
Raspberry Pi 5は消費電力が大きいのでGPIOからの供給は非推奨です。
Raspberry Pi 5に比べると発熱は少ないですが、最低限のファンやヒートシンクはつけましょう。また、Raspberry Piの周囲はスペースを確保して空気の流れを作っておくとよいです。
SSHでログイン
Raspberry PiがWi-Fiにつながったら、
ssh {username}@raspberrypi.local
でログインできます。
ターミナルで操作しても良いですが、開発のことを考えるとVSCodeからSSHするのが良いと思います。
VSCodeの以下の拡張機能をインストールして使用します。詳細はネットに記事がたくさんあるので調べてみてください。
ソースコードを書く
Pythonでプログラムを書くことを想定しています。
開発用に新規ディレクトリを作成し、仮想環境を構築しましょう。
仮想環境を使った方が安全にライブラリなどを管理できます。
以下の記事などが参考になります。
仮想環境を構築したらPythonファイルを作ってプログラムを書いていけばよいです。
ソースコードはGit管理するとよいです。
VSCodeのGUIでGitを操作するのが楽です。
複数UARTの有効化など
Raspberry Piには6つのUARTがありますが、初期設定では制限されています。
複数使用したい場合は、以下の記事などを参考にして有効化しておきましょう。
(Ubuntuでなくても同じように設定できます)
起動時プログラム自動実行の設定
ロボットの電源を入れたら特定のプログラムを実行するようにしたいですね。
systemdというものを使って設定します。
こちらの記事が参考になります。
ロボット競技会の本番などでは自動実行したいですが、開発中は自動実行されると困りますよね。
スライドスイッチなどをGPIOにつなげておいて、プログラム実行時にそれを読んで実行するか終了するかを判断させるとよいと思います。
おわりに
普通のマイコンと違って小型ロボットの用途で使いこなすには少し癖があるので早めにいろいろなことを確認しておきましょう。