はじめに
車の自動運転では周囲の状況をリアルタイムに把握し、状況に応じた車の制御を行う必要があります。画像処理技術は自動運転に必要な重要な要素技術になりますが、本記事では複数回に渡り、自動運転に必要な画像処理技術を Watson Studio で学習してみようと思います。学習にあたっては以下リンク先を参考にしています。
道路のレーン検出
今回は道路のレーンの検出を行います。白線や黄色線でレーンが描いてある場合にこれを画像処理で検出します。今回は OpenCV を使用して、白線の認識してみます。
手順
Watson Studioでプロジェクトを作成して、以下リンク先から Notebook を作成します。
https://github.com/schiyoda/Self-Driving-Car/blob/master/1.Line-Lane-Detection.ipynb
Notebookでは高速道路を走行中の動画の各フレームに対し、白黒変換->ハフ変換をして道路上の白線を直線として検出しています。Notebookを順に実行すると、以下のようにNotebook上で検出結果を見ることができます。
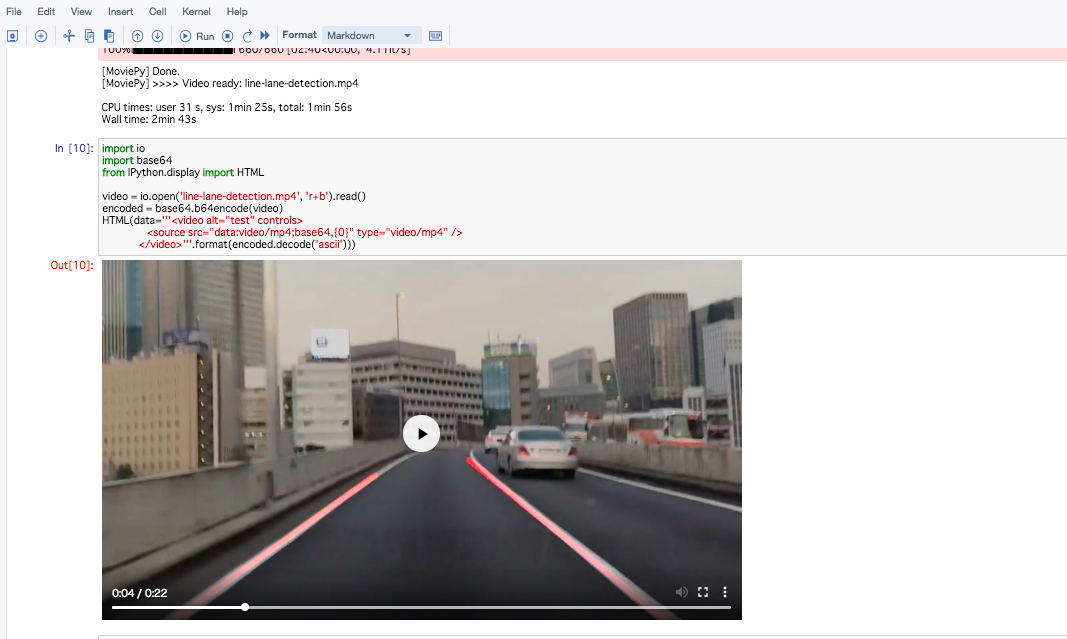
動画は以下リンクで参照可能です。
https://raw.githubusercontent.com/schiyoda/Self-Driving-Car/master/line-lane-detection.mp4