PmodALS(照度センサ) を使う
iCE40UP はシステム・バス(SB) をもっており、そこを通してSPI コントローラにアクセスします。バスはアドレス信号線とデータ信号線といくつかの補助信号線を持ちます。ここではシステム・バスをPython でコントロールすることになります。システム全体は図に示される形になります。Polyphony で作るモジュールは入出力としてシステム・バスへのIF を持ちます。
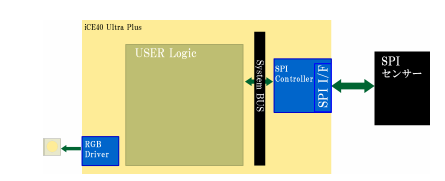
いやいやシステム・バスと言われても、、、
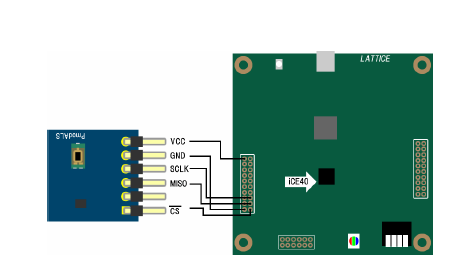
と急に難しくなったのでもっと簡単に考えましょう。 PmodALS を単純に Lattice のボードに接続して SPI 経由でセンサーからのデータを持ってくることが出来るとしましょう。
難しそうな SPI 読出し関数は既にあり〼
SPI も難しそうですが既にあるとしましょう。worker を使うのでちょっと難しくなりますが、ソースの全容を掲げます。これを使えば簡単に SPI に繋がります。
system_bus.py
import polyphony
from polyphony import testbench, module, is_worker_running
from polyphony.io import Port, Queue
from polyphony.typing import bit, uint8, uint3, uint4
from polyphony.timing import clksleep, clkfence, wait_rising, wait_falling, wait_value
CONVST_PULSE_CYCLE = 10
CONVERSION_CYCLE = 39
@polyphony.module
class system_bus:
def __init__(self):
self.stb = Port(bit, 'out', init=0)
self.rw = Port(bit, 'out')
self.addr = Port(uint8, 'out')
self.data_out = Port(uint8, 'out')
self.data_in = Port(uint8, 'in')
self.ack = Port(bit, 'in')
self.sbus_reset = Port(bit, 'out', init=0)
self.sbus_ipload = Port(bit, 'out', init=0)
self.sbus_ipdone = Port(bit, 'in')
self.led = Port(bit, 'out')
self.debug = Port(uint3, 'out')
self.append_worker(self.worker)
def write_data(self, addr:uint8, data:uint8):
self.rw(1)
self.addr(addr)
self.data_out(data)
clkfence()
self.stb(1)
clkfence()
wait_value(1, self.ack)
clkfence()
self.stb(0)
def read_data(self, addr:uint8):
data:uint8 = 0
self.rw(0)
self.addr(addr)
clkfence()
self.stb(1)
clkfence()
wait_value(1, self.ack)
data = self.data_in.rd()
clkfence()
self.stb(0)
return data
def read_spi_data16(self):
debug_v:uint3 = 0
debug_v = 4
#self.debug.wr(4)
self.write_data(0x06, 0x18)
self.write_data(0x0A, 0xC0)
self.write_data(0x0D, 0xFF)
while True:
irq_status = self.read_data(0x06)
irq_trdy = (irq_status >> 4) & 1
if irq_trdy == 1 :
self.write_data(0x06, 0x10)
break
self.write_data(0x0D, 0xFF)
#self.debug.wr(5)
debug_v = 1
while True:
irq_status = self.read_data(0x06)
irq_rrdy = (irq_status >> 3) & 1
debug_v = 7 ^ debug_v
# self.debug.wr(debug_v)
if irq_rrdy == 1:
self.write_data(0x06, 0x08)
break
data0 = self.read_data(0x0E) << 8
debug_v = 2
#self.debug.wr(2)
while True:
irq_status = self.read_data(0x06)
irq_rrdy = (irq_status >> 3) & 1
if irq_rrdy == 1:
debug_v = 4 ^ debug_v
#self.debug.wr(debug_v)
self.write_data(0x06, 0x08)
break
data1 = self.read_data(0x0E)
#self.debug.wr(1)
self.write_data(0x0A, 0x80)
return (data0 | data1)
def worker(self):
self.sbus_reset.wr(1)
clksleep(8)
self.sbus_reset.wr(0)
self.sbus_ipload(1)
self.debug.wr(4)
self._wait()
wait_value(1, self.sbus_ipdone)
self.sbus_ipload(0)
self.debug.wr(0)
clksleep(8)
self.write_data(0x07, 0x18)
self.write_data(0x0F, 2)
self.write_data(0x09, 0x80)
self.write_data(0x0A, 0xC0)
self.write_data(0x0B, 0x02)
self.write_data(0x0A, 0xC0)
self.write_data(0x0D, 0x35)
self.debug.wr(4)
irq_status = 0
while True:
irq_status = self.read_data(0x06)
irq_trdy = (irq_status >> 4) & 1
if irq_trdy == 1 :
self.write_data(0x06, 0x10)
break
#self.debug.wr((irq_status >> 3) & 3)
while True:
irq_status = self.read_data(0x06)
irq_rrdy = (irq_status >> 3) & 1
if irq_rrdy == 1 :
self.write_data(0x06, irq_status)
break
# self.write_data(0x0D, 0x5A)
# self.debug.wr((irq_status >> 3) & 3)
# #self.debug.wr(1)
#
# while True:
# irq_status = self.read_data(0x06)
# irq_trdy = (irq_status >> 4) & 1
# if irq_trdy == 1 :
# self.write_data(0x06, 0x10)
# #break
# irq_rrdy = (irq_status >> 3) & 1
# if irq_rrdy == 1 :
# self.write_data(0x06, 0x08)
# break
#
# self.debug.wr(1)
#self._wait()
#while True:
# irq_status = self.read_data(0x06)
# if irq_status == 0 :
# break
# self._wait()
# self.write_data(0x06, irq_status)
# self._wait()
#self.debug.wr((irq_status >> 3) & 2)
#self._wait()
self.write_data(0x0A, 0x80)
#----------------------------------------------------
self.write_data(0x0A, 0xC0)
self.write_data(0x0D, 0x12)
self.debug.wr(7)
irq_status = 0
while True:
irq_status = self.read_data(0x06)
irq_trdy = (irq_status >> 4) & 1
if irq_trdy == 1 :
self.write_data(0x0D, 0xAA)
self.write_data(0x06, 0x10)
break
#self.debug.wr((irq_status >> 3) & 2)
while True:
irq_status = self.read_data(0x06)
irq_rrdy = (irq_status >> 3) & 1
if irq_rrdy == 1 :
self.write_data(0x06, 0x08)
break
#self.debug.wr((irq_status >> 3) & 2)
while True:
irq_status = self.read_data(0x06)
irq_rrdy = (irq_status >> 3) & 1
if irq_rrdy == 1 :
self.write_data(0x06, 0x08)
break
self.write_data(0x0A, 0x80)
clkfence()
clksleep(10)
#self.debug.wr(4)
while polyphony.is_worker_running():
data16 = self.read_spi_data16()
print(data16)
self._wait()
#while is_worker_running():
# debug_v = 7 ^ debug_v
# self.led(1)
# self._wait()
# self.led(0)
# self._wait()
def _wait(self):
INTERVAL=20000000
for i in range(INTERVAL):
pass
def debug_out(self, debug_v:uint8):
self.debug.wr(3)
self._wait()
for i in range(4):
debug_v0 = (debug_v >> ((3 - i) * 2)) & 0x3
if ((i & 1) == 0) :
debug_v0 |= 4
self.debug.wr(debug_v0)
self._wait()
self.debug.wr(7)
self._wait()
self.debug.wr(0)
self._wait()
def rgb_out(self, n, v0:uint3, v1:uint3):
self.debug.wr(v0)
self._wait()
self.debug.wr(v1)
self._wait()
def debug_out0(self, debug_v:uint8):
self.rgb_out(20, 7, 0)
for i in range(4):
debug_v0 = (debug_v >> i) & 0x3
debug_v1 = debug_v0
if ((i & 1) == 0):
debug_v1 |= 4
self.rgb_out(10, debug_v0, debug_v1)
self.rgb_out(30, 7, 5)
self.debug.wr(0)
@polyphony.testbench
def test(sbus):
# sbus.ack(0)
# for i in range(5):
# wait_rising(sbus.stb)
# clksleep(1)
# sbus.ack(1)
# clkfence()
# sbus.ack(0)
clksleep(10)
if __name__ == '__main__':
sbus = system_bus()
test(sbus)
Python でシミュレーション
Python でテストベンチを動かすことが出来ます。
Pythonで実行
> python pmod_als.py
data0: 10912
iverilog でシミュレーション
simu.pyを実行
> <polyphony のディレクトリ>/simu.py pmod_als.py
Compiling: [=========================] 100% ... printresouces
(73, 68, 16)
data0: 10920
1190:finish