はじめに
OAK-D-Liteが届いたのでROS Noeticで動かしてみた
以下はOAK-DのROSパッケージのリンク
環境
OS : ubuntu20.04.03.LTS
ROS : Noeitc
OpenCV : 4.2.0
ROS Noeticのインストール
まだROSをインストールしていない場合は公式の手順通りにインストールする。
パッケージのインストール
基本的に以下のREADME通り
依存パッケージのインストール
sudo wget -qO- https://raw.githubusercontent.com/luxonis/depthai-ros/main/install_dependencies.sh | sudo bash
ワークスペースの作成
mkdir -p depthai_ws/src
ROSパッケージのインストール
cd depthai_ws/
wget https://raw.githubusercontent.com/luxonis/depthai-ros/main/underlay.repos
vcs import src < underlay.repos
rosdep install --from-paths src --ignore-src -r -y
source /opt/ros/noetic/setup.bash
catkin build
source devel/setup.bash
ROSノードの実行
ステレオカメラの画像を使う
source ~/depthai_ws/devel/setup.bash
roslaunch depthai_examples stereo_node.launch camera_model:=OAK-D-LITE
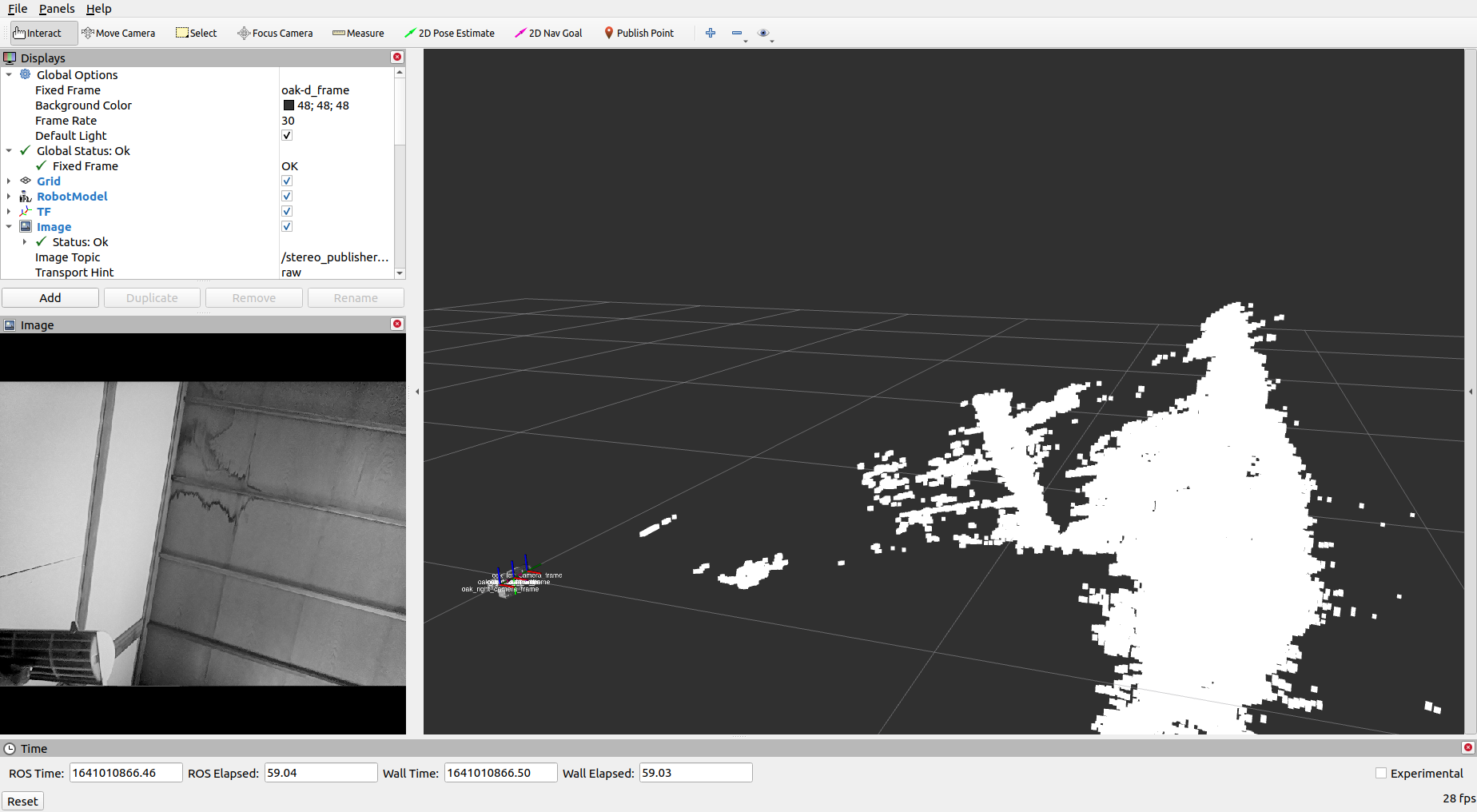
rvizが起動し、カメラ画像、RobotModel、DeothCloudが表示される。

RGB画像を使う
source ~/depthai_ws/devel/setup.bash
roslaunch depthai_examples rgb_publisher.launch camera_model:=OAK-D-LITE
/rgb_publisher/color/image , /rgb_publisher/color/image/compressedにカラー画像が出力される
PointCloudを使う
source ~/depthai_ws/devel/setup.bash
roslaunch depthai_examples stereo_nodelet.launch camera_model:=OAK-D-LITE
実行するとrvizが起動する。
/stereo_publisher/stereo/pointsというトピックにPointCloud2型の点群が出力される。
YOLOv4で物体検出する
source ~/depthai_ws/devel/setup.bash
roslaunch depthai_examples yolov4_publisher.launch
/yolov4_publisher/color/yolov4_Spatial_detectionsというトピックに物体検出結果が出力される。
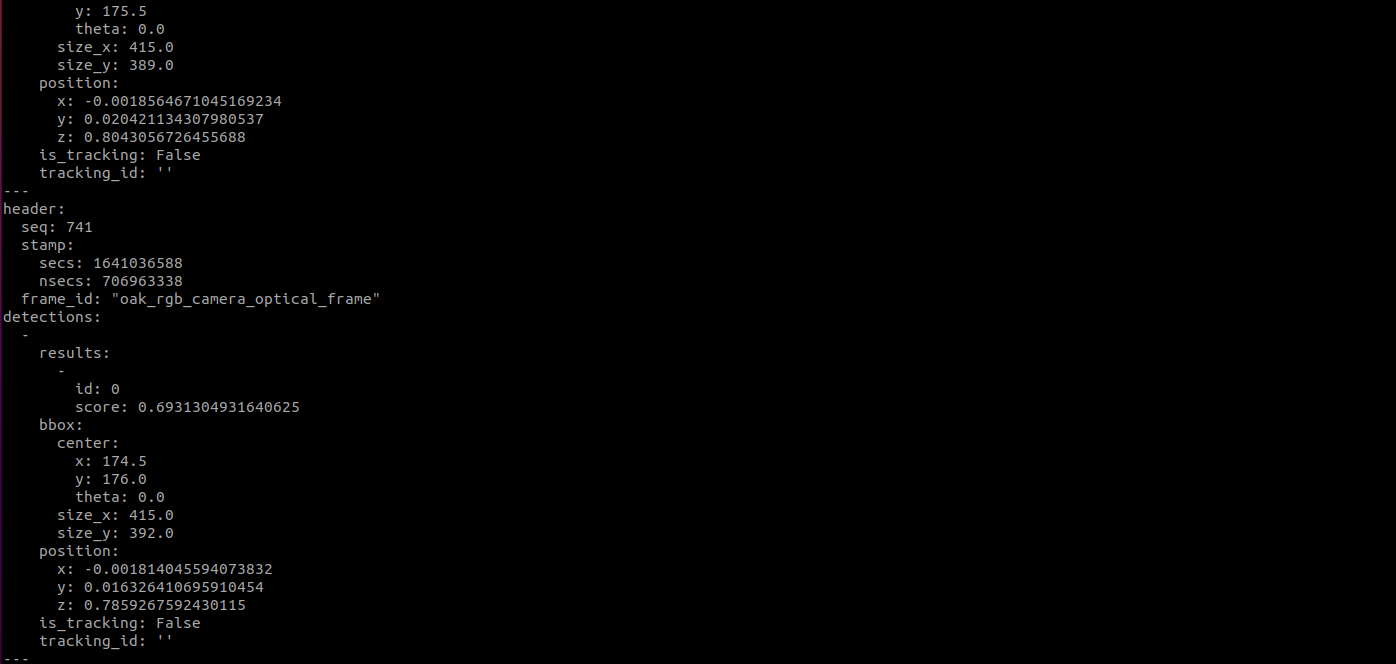
以下で検出結果の確認。
画像はID:0 のpersonを検出した時の出力例
source ~/depthai_ws/devel/setup.bash
rostopic echo /yolov4_publisher/color/yolov4_Spatial_detections
検出できる物体のクラスの一覧(depthai_example/ros1_src/yolov4_spatial_publisher.cpp 内の配列)
yolov4_spatial_publisher.cpp
const std::vector<std::string> label_map = {"person", "bicycle", "car", "motorbike", "aeroplane", "bus", "train",
"truck", "boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench",
"bird", "cat", "dog", "horse", "sheep", "cow", "elephant",
"bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie",
"suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite", "baseball bat",
"baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup",
"fork", "knife", "spoon", "bowl", "banana", "apple", "sandwich",
"orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake",
"chair", "sofa", "pottedplant", "bed", "diningtable", "toilet", "tvmonitor",
"laptop", "mouse", "remote", "keyboard", "cell phone", "microwave", "oven",
"toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors",
"teddy bear", "hair drier", "toothbrush"};
おわりに
OAK-D-Liteでもすべてのexampleを実行することができた。
参考