1. はじめに
Lチカで始めるテスト自動化シリーズ第十一弾です。
テスト対象の操作をしやすいよう、ロボットアームの位置決めをコントローラのつまみを回してできるようにします。
これまでの記事はこちらをご覧ください。
- Lチカで始めるテスト自動化
- Lチカで始めるテスト自動化(2)テストスクリプトの保守性向上
- Lチカで始めるテスト自動化(3)オシロスコープの組込み
- Lチカで始めるテスト自動化(4)テストスクリプトの保守性向上(2)
- Lチカで始めるテスト自動化(5)WebカメラおよびOCRの組込み
- Lチカで始めるテスト自動化(6)AI(機械学習)を用いたPass/Fail判定
- Lチカで始めるテスト自動化(7)タイムスタンプの保存
- Lチカで始めるテスト自動化(8)HDMIビデオキャプチャデバイスの組込み
- Lチカで始めるテスト自動化(9)6DoFロボットアームの組込み
- Lチカで始めるテスト自動化(10)6DoFロボットアームの制御スクリプトの保守性向上
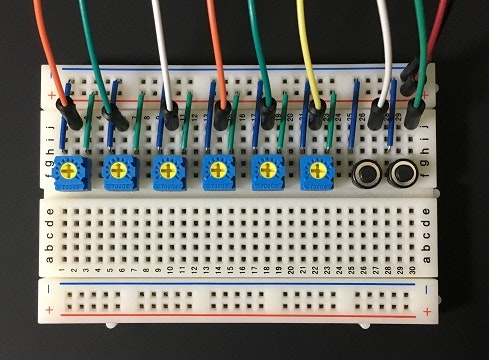
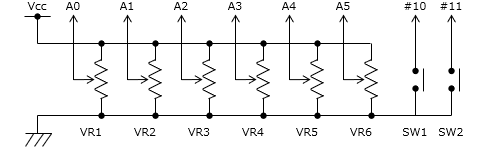
2. 回路
以下に回路図を示します。
- 可変抵抗器VR1~VR6は50kΩで、摺動子の端子をArduino LeonardoのAnalog In A0~A5に接続します。
- A0~A5が各々Servo ID 0~5に対応します。
- 筆者は東京コスモス電機のGF063P1B503をマルツで購入しました。
- スイッチSW1、SW2をDigital Pinの#10、#11に接続します。
3. Arduinoファームウェアの改修
ユースケースを以下に示します。
- スイッチSW1を押しながら可変抵抗器VR1~VR6を操作して位置決めを行う。
- スイッチSW2を押してサーボの回転角度情報をUARTに出力し、(キャプチャリプレイの)キャプチャを行う。
プログラムの改修箇所を以下に示します。
- Digital Pin #10、#11のピンモードをINPUT_PULLUPに設定する。
- loop()内でスイッチの押下判定を行う。
- スイッチSW1を押されたらANALOG IN A0~A5の電圧に応じてサーボを回転させる。
- スイッチSW2を押されたらservo_read()を実行する。
Arduino6DoFArmV2.ino
/***********************************************************************
* Arduino6DoFArm
* 2020-07-24 by ka's
* 2020-08-30 update
*
* This software includes the work that is distributed
* in the Apache License 2.0
***********************************************************************/
# include <Servo.h>
# define ERR_OK 0
# define ERR_INVALID -1 // 不正
# define ERR_NULL -2 // 引数がNULL
# define ERR_MALLOC -3 // mallocの戻り値がNULL
//Digital Pin Assign
# define BTN_REFLECT_ADC_VAL 10 // このボタンを押すとADCの値がサーボの角度に反映される
# define BTN_PRINT_SERVO_READ 11 // このボタンを押すとservo_read()が実行される
void setup();
void loop();
/***********************************************************************
Servo
***********************************************************************/
class servo : public Servo
{
public:
servo(int id, int pin, uint8_t initial, uint8_t lower, uint8_t upper);
~servo();
initialize();
rotate(int angle);
rotate_reflect_adc_val();
private:
int servo_id;
int servo_pin;
long last_angle;
uint8_t rotate_initial;//初期値
uint8_t rotate_lower; //可動範囲(下側)
uint8_t rotate_upper; //可動範囲(上側)
};
servo::servo(int id, int pin, uint8_t initial, uint8_t lower, uint8_t upper)
{
servo_id = id;
servo_pin = pin;
last_angle = initial;
rotate_initial = initial;
rotate_lower = lower;
rotate_upper = upper;
}
servo::~servo()
{
detach();
}
servo::initialize()
{
attach(servo_pin);
rotate(rotate_initial);
}
servo::rotate(int angle)
{
if(angle<rotate_lower or rotate_upper<angle)
{
Serial1.print("### out of range:");
Serial1.print(servo_id);
Serial1.print(" ");
Serial1.println(angle);
return ERR_INVALID;
}
else
{
last_angle = angle;
write(angle);
return ERR_OK;
}
}
servo::rotate_reflect_adc_val()
{
int value = analogRead(servo_id);
long angle = map(value, 0, 1023, rotate_lower, rotate_upper);
if( last_angle != angle )
{
Serial1.print(servo_id);
Serial1.print(" ");
Serial1.println(angle);
last_angle = angle;
rotate(angle);
}
}
servo servo00(0, 2, 85, 40, 140);
servo servo01(1, 3, 90, 75, 110);
servo servo02(2, 4, 90, 50, 110);
servo servo03(3, 5, 90, 50, 110);
servo servo04(4, 6, 90, 0, 180);
servo servo05(5, 7, 170, 120, 180);
void servo_init()
{
servo05.initialize();
delay(500);
servo00.initialize();
delay(500);
servo01.initialize();
delay(500);
servo02.initialize();
delay(500);
servo03.initialize();
delay(500);
servo04.initialize();
delay(500);
}
void servo_read()
{
Serial1.print(servo00.read());
Serial1.print(" ");
Serial1.print(servo01.read());
Serial1.print(" ");
Serial1.print(servo02.read());
Serial1.print(" ");
Serial1.print(servo03.read());
Serial1.print(" ");
Serial1.print(servo04.read());
Serial1.print(" ");
Serial1.print(servo05.read());
Serial1.print("\r\n");
}
void servo_rotate_reflect_adc_val()
{
servo00.rotate_reflect_adc_val();
servo01.rotate_reflect_adc_val();
servo02.rotate_reflect_adc_val();
servo03.rotate_reflect_adc_val();
servo04.rotate_reflect_adc_val();
servo05.rotate_reflect_adc_val();
}
/***********************************************************************
Function Prototype : Command Mode
***********************************************************************/
# define CMD_OK ERR_OK
# define CMD_BUF_LENGTH 64 // 63+1
# define CMD_MAX_LENGTH 64 // 63+1
# define ARG_MAX_LENGTH 64 // 63+1
void cmd_print_help(void);
void cmd_print_ver(void);
int cmd_execute(bool *echoback, char *buf);
void cmd_rx_data(void);
/***********************************************************************
Function : Command Mode
***********************************************************************/
void cmd_print_help(void)
{
Serial1.println(F("Available Command:"));
Serial1.println(F("help, ? : print Help Messages"));
Serial1.println(F("ver : print Version Information"));
Serial1.println(F("echo <flag> : flag(0 to off, 1 to on)"));
Serial1.println(F("servo <id> <rotate> : id(0-5), rotate(0-180)"));
Serial1.println(F("servoread : print rotation value"));
}
void cmd_print_ver(void)
{
Serial1.print("This is ");
Serial1.print(__FILE__);
Serial1.print(" ");
Serial1.print("Build at ");
Serial1.print(__DATE__);
Serial1.print(" ");
Serial1.print(__TIME__);
Serial1.print("\r\n");
}
int cmd_execute(bool *echoback, char *buf)
{
int i, x, y;
unsigned int ux;
int return_val = CMD_OK;
int echo_on = false;
char cmd[CMD_MAX_LENGTH];
char arg1[ARG_MAX_LENGTH];
char arg2[ARG_MAX_LENGTH];
strcpy(cmd, "");
strcpy(arg1, "");
strcpy(arg2, "");
sscanf(buf, "%s %s %s", &cmd, &arg1, &arg2);
if (strcmp(cmd, "help")==0){ cmd_print_help(); }
else if(strcmp(cmd, "?" )==0){ cmd_print_help(); }
else if(strcmp(cmd, "ver" )==0){ cmd_print_ver(); }
else if(strcmp(cmd, "echo")==0)
{
if(atoi(arg1))
{
*echoback = true;
}
else
{
*echoback = false;
}
}
else if(strcmp(cmd, "servo")==0)
{
switch(atoi(arg1))
{
case 0:
return_val = servo00.rotate(atoi(arg2));
break;
case 1:
return_val = servo01.rotate(atoi(arg2));
break;
case 2:
return_val = servo02.rotate(atoi(arg2));
break;
case 3:
return_val = servo03.rotate(atoi(arg2));
break;
case 4:
return_val = servo04.rotate(atoi(arg2));
break;
case 5:
return_val = servo05.rotate(atoi(arg2));
break;
default:
Serial1.println("### Invalid Parameter. ###");
return_val = ERR_INVALID;
break;
}
}
else if(strcmp(cmd, "servoread")==0)
{
servo_read();
}
else
{
Serial1.println("### Unknown Command. ###");
return_val = ERR_INVALID;
}
return return_val;
}
void cmd_rx_data(void)
{
static int i = 0;
static char buf[CMD_BUF_LENGTH];
static bool echoback = true;
int return_val = CMD_OK;
if(Serial1.available())
{
buf[i] = Serial1.read();
if(echoback) Serial1.print(buf[i]); //echo-back
if ( (buf[i] == 0x08) or (buf[i] == 0x7f) ) //BackSpace, Delete
{
buf[i] = '\0';
if(i) i--;
}
else if( (buf[i] == '\r') or (buf[i] == '\n') )
{
if(echoback) Serial1.print( F("\r\n") );
buf[i] = '\0';
return_val = cmd_execute(&echoback, &buf[0]);
for(i=0; i<CMD_BUF_LENGTH; i++) buf[i] = '\0';
i=0;
if(return_val == ERR_OK)
{
Serial1.print(F("OK\r\n"));
}
}
else
{
i++;
if(i>=CMD_BUF_LENGTH)
{
Serial1.print(F("### CMD BUFFER FULL, CLEAR. ###\r\n"));
for(i=0; i<CMD_BUF_LENGTH; i++) buf[i] = '\0';
i=0;
}
}
}
}
/***********************************************************************
Function : setup and loop
***********************************************************************/
void setup()
{
Serial1.begin(115200);
pinMode(BTN_REFLECT_ADC_VAL, INPUT_PULLUP);
pinMode(BTN_PRINT_SERVO_READ,INPUT_PULLUP);
servo_init();
}
// the loop routine runs over and over again forever
void loop()
{
cmd_rx_data();
if(digitalRead(BTN_REFLECT_ADC_VAL)==LOW)
{
servo_rotate_reflect_adc_val();
}
if(digitalRead(BTN_PRINT_SERVO_READ)==LOW)
{
servo_read();
while(digitalRead(BTN_PRINT_SERVO_READ)==LOW){};
}
}
4. おわりに
ロボットアームの位置決めをコントローラのつまみを回してできるようになり、何度もコマンドを発行して合わせるよりもやりやすくなりました。