1. はじめに
Arduino Leonardoで多目的ツールの製作のCLI(Command Line Interface)のコア部分をM5Stackに移植しました。
2. 型のサイズを調べる
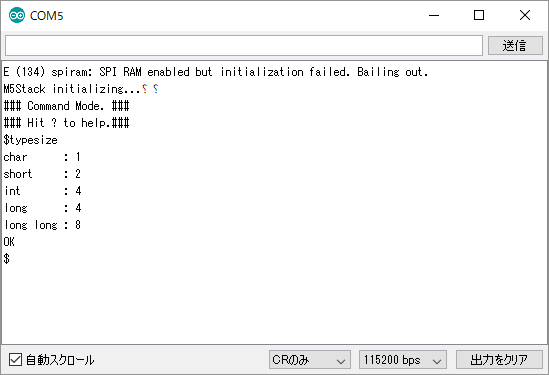
typesizeというchar、short、int、long、long longのサイズ(バイト数)を調べるコマンドを作成しました。その実行結果を以下に示します。Arduino Leonardoに搭載されているAVRマイコンとint型のサイズが異なっていることがわかりました(AVRマイコンのint型は2バイトです)。
| 型 | サイズ(バイト数) |
|---|---|
| char | 1 |
| short | 2 |
| int | 4 |
| long | 4 |
| long long | 8 |
3. プログラム
# include <M5Stack.h>
void setup();
void loop();
void cmd_print_help(void);
void cmd_print_ver(void);
int cmd_execute(char *buf);
void cmd_rx_data(void);
// the setup routine runs once when M5Stack starts up
void setup(){
// Initialize the M5Stack object
M5.begin();
Serial.begin(115200);
// LCD display
M5.Lcd.print("MyM5STACK Ver.001");
}
// the loop routine runs over and over again forever
void loop() {
if(Serial.available()) {
cmd_rx_data();
}
}
/***********************************************************************
Command Mode
***********************************************************************/
# define CMD_QUIT 1
# define CMD_OK 0
# define CMD_INVALID -1
# define CMD_MALLOC_ERR -2
# define CMD_BUF_LENGTH 64 // 63+1
# define CMD_MAX_LENGTH 64 // 63+1
# define ARG_MAX_LENGTH 64 // 63+1
void cmd_print_help(void)
{
Serial.print("Available Command:\r\n");
Serial.print("help, ? : Print Help Messages\r\n");
Serial.print("ver : Print Version Information\r\n");
Serial.print("typesize : print type's size\r\n");
Serial.print("quit, exit : Quit Command Control Mode\r\n");
}
void cmd_print_ver(void)
{
Serial.print("This is ");
Serial.print(__FILE__);
Serial.print(" ");
Serial.print("Build at ");
Serial.print(__DATE__);
Serial.print(" ");
Serial.print(__TIME__);
Serial.print("\r\n");
}
int cmd_execute(char *buf)
{
int i, x, y;
unsigned int ux;
int return_val = CMD_OK;
char cmd[CMD_MAX_LENGTH];
char arg1[ARG_MAX_LENGTH];
char arg2[ARG_MAX_LENGTH];
strcpy(cmd, "");
strcpy(arg1, "");
strcpy(arg2, "");
sscanf(buf, "%s %s %s", &cmd, &arg1, &arg2);
if (strcmp(cmd, "help")==0){ cmd_print_help(); }
else if(strcmp(cmd, "?" )==0){ cmd_print_help(); }
else if(strcmp(cmd, "ver" )==0){ cmd_print_ver(); }
else if((strcmp(cmd, "quit")==0) or (strcmp(cmd, "exit")==0))
{
return CMD_QUIT;
}
else if(strcmp(cmd, "typesize")==0)
{
Serial.print("char : ");
Serial.print( sizeof(char) );
Serial.print("\r\nshort : ");
Serial.print( sizeof(short) );
Serial.print("\r\nint : ");
Serial.print( sizeof(int) );
Serial.print("\r\nlong : ");
Serial.print( sizeof(long) );
Serial.print("\r\nlong long : ");
Serial.print( sizeof(long long) );
Serial.print("\r\n");
}
else
{
return CMD_INVALID;
}
return return_val;
}
void cmd_rx_data(void)
{
int i;
int return_val = CMD_OK;
char buf[CMD_BUF_LENGTH];
/* モード切替時の "Hit any key" のキー操作を捨てる */
while(Serial.available()){ Serial.read(); }
Serial.print("\r\n### Command Mode. ###\r\n");
Serial.print("### Hit ? to help.###\r\n");
Serial.print("$");
i=0;
while(1)
{
if(Serial.available())
{
buf[i] = Serial.read();
Serial.print(buf[i]); //echo-back
if ( (buf[i] == 0x08) or (buf[i] == 0x7f) ) //BackSpace, Delete
{
buf[i] = '\0';
if(i) i--;
}
else if( (buf[i] == '\r') or (buf[i] == '\n') )
{
Serial.print( F("\r\n") );
buf[i] = '\0';
return_val = cmd_execute(&buf[0]);
for(i=0; i<CMD_BUF_LENGTH; i++) buf[i] = '\0';
i=0;
if(return_val == CMD_QUIT)
{
Serial.print("### Quit Command Mode. ###\r\n");
return;
}
else if(return_val == CMD_INVALID)
{
Serial.print("?\r\n");
Serial.print("$");
}
else
{
Serial.print("OK\r\n$");
}
}
else
{
i++;
if(i>=CMD_BUF_LENGTH)
{
Serial.print("### CMD BUFFER FULL, CLEAR. ###\r\n");
for(i=0; i<CMD_BUF_LENGTH; i++) buf[i] = '\0';
i=0;
}
}
}
}// while
}