mblock3用OTTODIYブロック
mblock3 extensionのOTTODIYブロックについて調べたので記録
(セットアップ方法についてはhttps://qiita.com/okamot_dmc/items/6cd6c9da2c44c2db362aを参照)
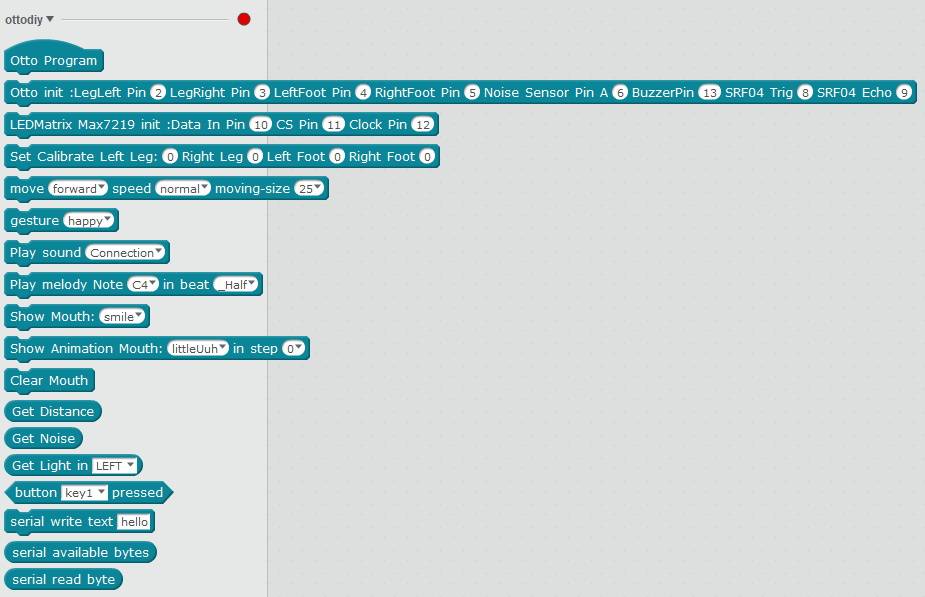
0. Otto Program
プログラムの先頭に置くブロック
1. Otto init
サーボやブザー等のピン配置を指定。
OTTOマニュアルのピン配置に従っている場合は利用不要
2. LEDMatrix
(LED搭載OTTOのみの機能)
3. Set Calibrate
サーボモータ初期位置を調整する。
使用方法は"Calibration_mBlock_Program.sb2"を参照。
4. move
パラメータは "moveID", "speed"と"moving-size"の3つ。
"movingID"で動きを指定し、"speed"で速さを指定する。
moveIDによっては"moving-size"を利用し、動作量(角度)限界を指定する。
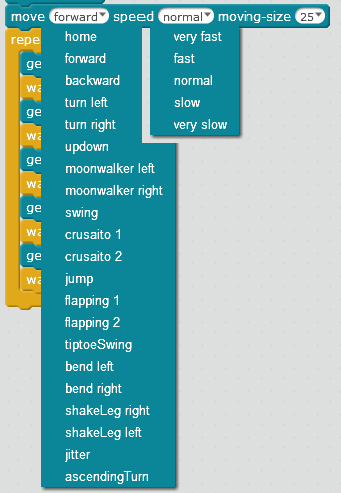
moveIDリスト1 (moving-size無効)
- home: サーボを初期位置にリセット(speedも無効)
- forward: 前進(speedで歩く速さを指定)
- backward: 後進(speedで歩く速さを指定)
- turn left: 左前にターン(speedで歩く速さを指定)
- turn right: 右前にターン(speedで歩く速さを指定)
- jump: 両footサーボを同時に動かして上下運動
- bend left: 右足を浮かして左足のみで立つ
- bend right: 上と左右逆
- shakeLeg left: 右にボディを傾けて左footを上げ、footを振る
- shakeLeg right: 上と左右逆
moveIDリスト2 (moving-size有効)
- updown: moving-sizeで上昇量を調整
- moonwalker: ムーンウォークのように足を揺らしながら移動。moving-sizeでfootの上げる量を調整
- swing: 左右にボディを揺らす。 moving-sizeで左右の揺動量を調整
- crusaito 1: walk(forward)とmoonwalkのmix. forwardよりもfoot角度を上げて左に移動(moving-size範囲: 20-50)
- crusaito 2: 上と同様(右に移動)
- flapping 1: jumpのようにfootを上げながら前に進む(進む量はmoving-sizeで調整)
- flapping 2: flapping 1の後進版
- tiptoeSwing: 両footサーボを逆に同時に動かして左右と上下に揺動
- jitter: Legサーボを動かして内股・外股に足を動かす
- ascendingTurn: jitterのようにLegサーボを動かしてターンする
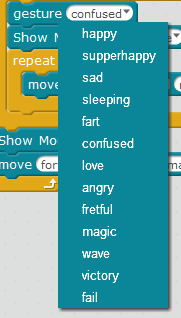
5. gesture
LED Mouthとブザー、サーボを使ってOTTOで感情表現するブロック。
選択肢は以下の通り。
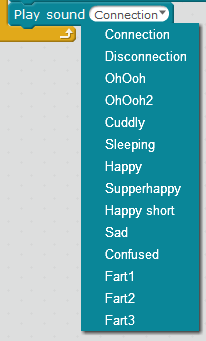
6. Play sound
ブザーからプログラムされた音を鳴らすブロック。
選択肢は図の通り。
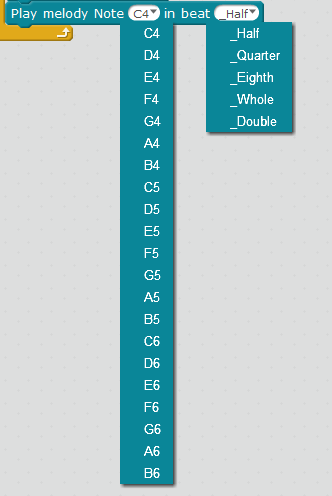
7. Play melody
ブザーから指定の音を鳴らすブロック
8. Show Mouth
(LED Mouth搭載OTTO用の機能)
9. Show Animation Mouth
(LED Mouth搭載OTTO用の機能)
10. Clear Mouth
(LED Mouth搭載OTTO用の機能)
11. Get Distance
超音波センサで距離を測定する。単位はcm。
12. Get Noise
(sound sensor搭載のOTTO用の機能)
13. Get Light
機能なし
14. button pressed
機能なし
15. serial write text
シリアルで文字列を送信するブロック
teraterm等のシリアル通信アプリに表示できる。
16. serial available bytes
シリアルで受信したデータのバイトを読み込むブロック。
下図のように使って受信の判定に利用できる。
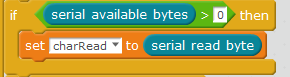
17. serial read byte
シリアル通信で読み込んだデータを持つブロック。
上図のようにsetブロックと併用してデータ用の変数に受け渡す