概要
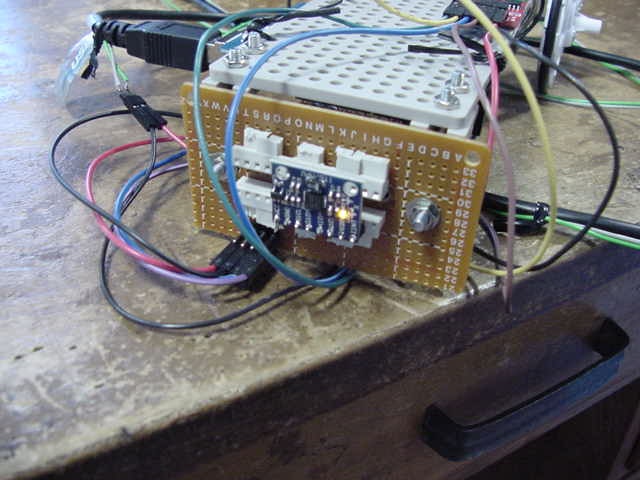
arduino unoにジャイロをつないでみた。
mpu6050をi2cでつないだ。
写真
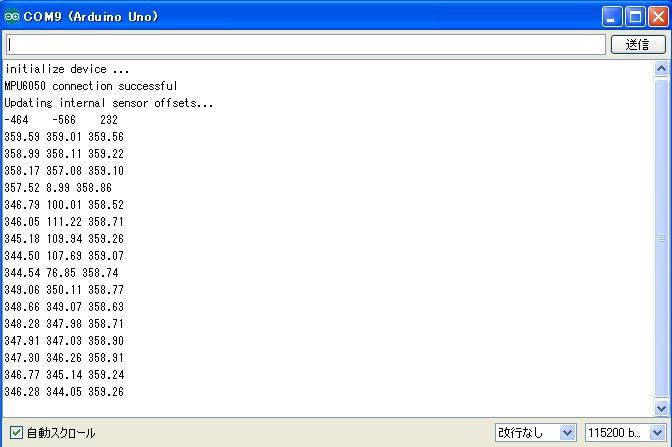
ログ
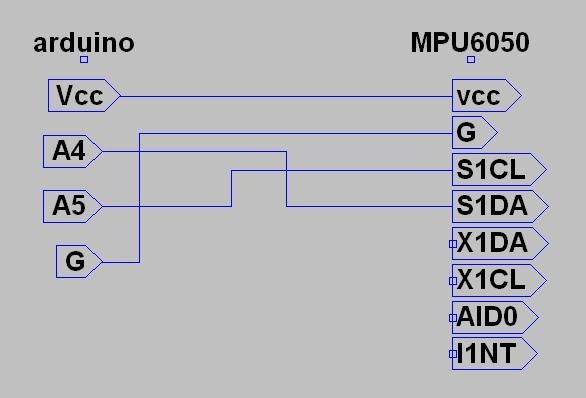
回路図
サンプルコード
# include "I2Cdev.h"
# include "MPU6050.h"
# include "Wire.h"
MPU6050 mpu;
unsigned long time = 0;
float prev_X = 0;
float prev_Y = 0;
float prev_Z = 0;
float angle_X = 0;
float angle_Y = 0;
float angle_Z = 0;
int t = 0;
void setup()
{
int gx, gy, gz;
Wire.begin();
Serial.begin(115200);
while (!Serial);
Serial.println("initialize device ...");
mpu.initialize();
delay(900);
Serial.println(mpu.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
Serial.println("Updating internal sensor offsets...");
mpu.setXGyroOffset(-464);
mpu.setYGyroOffset(-566);
mpu.setZGyroOffset(232);
Serial.print(mpu.getXGyroOffset());
Serial.print("\t");
Serial.print(mpu.getYGyroOffset());
Serial.print("\t");
Serial.println(mpu.getZGyroOffset());
}
void loop()
{
int az, gx, gy, gz;
int sampleTime = 10;
if (millis() - time > sampleTime)
{
time = millis();
t++;
mpu.getRotation(&gx, &gy, &gz);
angle_X += ((prev_X + gx) * sampleTime) / 131000;
prev_X = gx;
if (angle_X < 0)
{
angle_X += 360;
}
else if (angle_X >= 360)
{
angle_X -= 360;
}
angle_Y += ((prev_Y + gy) * sampleTime) / 131000;
prev_Y = gy;
if (angle_Y < 0)
{
angle_Y += 360;
}
else if (angle_Y >= 360)
{
angle_Y -= 360;
}
angle_Z += ((prev_Z + gz) * sampleTime) / 131000;
prev_Z = gz;
if (angle_Z < 0)
{
angle_Z += 360;
}
else if (angle_Z >= 360)
{
angle_Z -= 360;
}
if (t > 100)
{
t = 0;
Serial.print(angle_X);
Serial.print(" ");
Serial.print(angle_Y);
Serial.print(" ");
Serial.println(angle_Z);
}
}
}