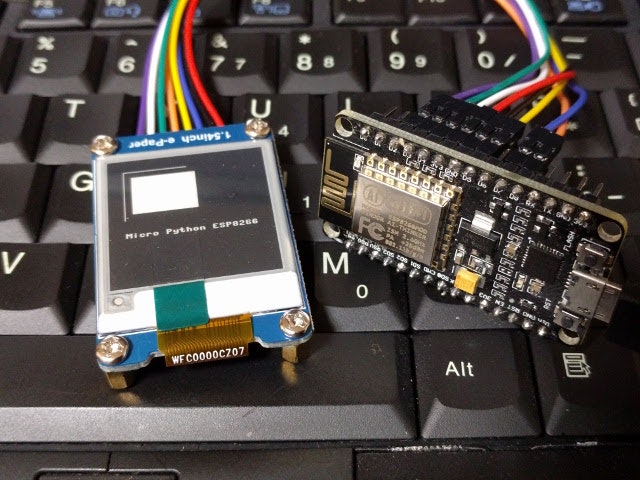
Waveshare 社の e-Paper モジュールを ESP8266 の MicroPython で使ってみました。今回は 1.54 inch 白黒二色のものを使いました。画面解像度については今のところ定数値としており専用になっていますが、これを変更することで同社の他のサイズのものでも使えます。
プログラムは driver/display/ssd1306.py に倣っており、同様に使うことができます。framebuf を使えば描画機能を任せられるので、デバイス固有の初期化とデータの転送部分だけを書けば済んでしまいます。micro じゃないほうの python の Image ライブラリなどに比べると色々と機能は足りません。デバイスの機能では部分的な表示の更新も可能ですが、e-Paper の特性から省略しました。ssd1306 では SPI と I2C の両方がありますが、こちらは SPI のみのため、そのレベルでの抽象化もしていません。
# epd1in54.py
# ePaper driver for MicroPython
# 2017.10 n24bass@gmail.com
from micropython import const
import framebuf
import time
# Display resolution
EPD_WIDTH = const(200)
EPD_HEIGHT = const(200)
# EPD1IN54 commands
DRIVER_OUTPUT_CONTROL = const(0x01)
BOOSTER_SOFT_START_CONTROL = const(0x0C)
GATE_SCAN_START_POSITION = const(0x0F)
DEEP_SLEEP_MODE = const(0x10)
DATA_ENTRY_MODE_SETTING = const(0x11)
SW_RESET = const(0x12)
TEMPERATURE_SENSOR_CONTROL = const(0x1A)
MASTER_ACTIVATION = const(0x20)
DISPLAY_UPDATE_CONTROL_1 = const(0x21)
DISPLAY_UPDATE_CONTROL_2 = const(0x22)
WRITE_RAM = const(0x24)
WRITE_VCOM_REGISTER = const(0x2C)
WRITE_LUT_REGISTER = const(0x32)
SET_DUMMY_LINE_PERIOD = const(0x3A)
SET_GATE_TIME = const(0x3B)
BORDER_WAVEFORM_CONTROL = const(0x3C)
SET_RAM_X_ADDRESS_START_END_POSITION = const(0x44)
SET_RAM_Y_ADDRESS_START_END_POSITION = const(0x45)
SET_RAM_X_ADDRESS_COUNTER = const(0x4E)
SET_RAM_Y_ADDRESS_COUNTER = const(0x4F)
TERMINATE_FRAME_READ_WRITE = const(0xFF)
LUT_FULL_UPDATE = bytes([
0x02, 0x02, 0x01, 0x11, 0x12, 0x12, 0x22, 0x22,
0x66, 0x69, 0x69, 0x59, 0x58, 0x99, 0x99, 0x88,
0x00, 0x00, 0x00, 0x00, 0xF8, 0xB4, 0x13, 0x51,
0x35, 0x51, 0x51, 0x19, 0x01, 0x00
])
LUT_PARTIAL_UPDATE = bytes([
0x10, 0x18, 0x18, 0x08, 0x18, 0x18, 0x08, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x13, 0x14, 0x44, 0x12,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00
])
# ESP8266
# BUSY D2 GPIO4
# RST D4 GPIO2
# DC D3 GPIO0
# CS D8 GPIO15
# CLK D5 GPIO14
# DO D6 GPIO12(not used)
# DIN D7 BPIO13
class EPD:
def __init__(self, spi, dc, res, cs, busy):
# SPI
self.rate = 2 * 1024 * 1024 # 2MHz
self.spi = spi
# other pin
self.dc_pin = dc
self.reset_pin = res
self.cs_pin = cs
self.busy_pin = busy
#
self.width = EPD_WIDTH
self.height = EPD_HEIGHT
# frame buffer
self.buffer = bytearray(EPD_HEIGHT * EPD_WIDTH // 8)
fb = framebuf.FrameBuffer(self.buffer, self.width, self.height, framebuf.MONO_HLSB)
self.framebuf = fb
self.fill = fb.fill
self.pixel = fb.pixel
self.hline = fb.hline
self.vline = fb.vline
self.line = fb.line
self.rect = fb.rect
self.fill_rect = fb.fill_rect
self.text = fb.text
self.scroll = fb.scroll
self.blit = fb.blit
self.init_display()
def init_display(self):
self.dc_pin.init(self.dc_pin.OUT, value=0)
self.reset_pin.init(self.reset_pin.OUT, value=0)
self.cs_pin.init(self.cs_pin.OUT, value=1)
self.busy_pin.init(self.busy_pin.IN)
self.lut = LUT_FULL_UPDATE
self.reset()
self.send_command(DRIVER_OUTPUT_CONTROL)
self.send_data(bytes([(EPD_HEIGHT - 1) & 0xFF, ((EPD_HEIGHT - 1) >> 8) & 0xFF, 0x00]))
self.send_command(BOOSTER_SOFT_START_CONTROL)
self.send_data(bytes([0xD7, 0xD6, 0x9D]))
self.send_command(WRITE_VCOM_REGISTER)
self.send_data(bytes([0xA8])) # VCOM 7C
self.send_command(SET_DUMMY_LINE_PERIOD)
self.send_data(bytes([0x1A])) # 4 dummy lines per gate
self.send_command(SET_GATE_TIME)
self.send_data(bytes([0x08])) # 2us per line
self.send_command(DATA_ENTRY_MODE_SETTING)
self.send_data(bytes([0x03])) # X increment; Y increment
self.set_lut(self.lut) # set LUT for full or partial update
def send_command(self, command):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs_pin(1)
self.dc_pin(0)
self.cs_pin(0)
self.spi.write(bytes([command]))
self.cs_pin(1)
def send_data(self, buf):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs_pin(1)
self.dc_pin(1)
self.cs_pin(0)
self.spi.write(buf)
self.cs_pin(1)
def wait_until_idle(self):
while (self.busy_pin() == 1):
time.sleep_ms(100)
def reset(self):
self.reset_pin(0)
time.sleep_ms(200)
self.reset_pin(1)
time.sleep_ms(200)
def set_lut(self, lut):
self.lut = lut
self.send_command(WRITE_LUT_REGISTER)
self.send_data(self.lut)
def show(self):
self.set_frame_memory()
self.display_frame()
def set_frame_memory(self):
self.set_memory_area(0, 0, self.width - 1, self.height - 1)
self.set_memory_pointer(0, 0)
self.send_command(WRITE_RAM)
self.send_data(self.buffer)
def display_frame(self):
self.send_command(DISPLAY_UPDATE_CONTROL_2)
self.send_data(bytes([0xC4]))
self.send_command(MASTER_ACTIVATION)
self.send_command(TERMINATE_FRAME_READ_WRITE)
self.wait_until_idle() # busy wait
def set_memory_area(self, x_start=0, y_start=0, x_end=EPD_WIDTH-1, y_end=EPD_HEIGHT-1):
# x point must be the multiple of 8 or the last 3 bits will be
self.send_command(SET_RAM_X_ADDRESS_START_END_POSITION)
self.send_data(bytes([(x_start >> 3) & 0xFF, (x_end >> 3) & 0xFF]))
self.send_command(SET_RAM_Y_ADDRESS_START_END_POSITION)
self.send_data(bytes([y_start & 0xFF, (y_start >> 8) & 0xFF, y_end & 0xFF, (y_end >> 8) & 0xFF]))
def set_memory_pointer(self, x, y):
# x point must be the multiple of 8 or the last 3 bits will be ignored
self.send_command(SET_RAM_X_ADDRESS_COUNTER)
self.send_data(bytes([(x >> 3) & 0xFF]))
self.send_command(SET_RAM_Y_ADDRESS_COUNTER)
self.send_data(bytes([y & 0xFF, (y >> 8) & 0xFF]))
self.wait_until_idle()
def sleep(self):
self.send_command(DEEP_SLEEP_MODE)
self.wait_until_idle()
if __name__ == "__main__":
from machine import Pin, SPI
spi = SPI(1)
epd = EPD(spi, dc=Pin(0), res=Pin(2), cs=Pin(15), busy=Pin(4))
epd.fill(0)
epd.text('ESP8266', 0, 0)
epd.text('Waveshare ePaper', 0, 10)
epd.show()
参照
-
https://www.waveshare.com/wiki/1.54inch_e-Paper_Module
オフィシャル wiki のデモコードには Arduino や STM32 向けの C++ ライブラリの他に Raspberry pi 向けの Python プログラムなどもあります。 -
https://github.com/n24bass/ESP8266_MicroPython_test/blob/master/epd1in54.py
github にも置いています。