はじめに
「ROS2 Advent Calendar 2019 14日」に参加しております。
(すでに投稿済みの内容ですが、これに合わせて若干手直ししました。)
ROS2とPython3を用いて、カスタムメッセージを使った簡単なノードを作ってみます。
Python3ではじめるROS2 関連記事
| 回数 | サブタイトル | 内容 |
|---|---|---|
| 第1回 | カスタムメッセージ編 | ・環境の準備 ・カスタムメッセージを作る ・(おまけ).bashrcのカスタマイズ |
| 第2回 | ノード編 | ・Pub/Subのノードを作る |
| 第3回(今回) | 自動起動編 | ・roslaunchから起動する ・systemdからroslaunchを起動する |
1.roslaunchから起動
カスタムメッセージ編・ノード編で作ってきたPub / Subノードを、launchファイルからまとめて起動します。
(1)準備
launchファイルを作ります。
~/ros2_ws/src$ cd pubsubpy
~/ros2_ws/src/pubsubpy$ touch pubsubpy.launch.py
(2)launchファイル
# -----------------------------------------------
# ROS LAUNCH
#
# The MIT License (MIT)
# Copyright (C) 2019 myasu.
# -----------------------------------------------
"""Launch a add_two_ints_server and a (synchronous) add_two_ints_client."""
import launch
import launch_ros.actions
def generate_launch_description():
### ここにlaunchしたいノードを定義
### node_executableのところは、setup.pyのなかの
### entry_pointsで指定した (例)pub = node.Pub:main
### の左辺側の文字と合わせて下さい
pub = launch_ros.actions.Node(
package='pubsubpy', node_executable='pub', output='screen')
sub = launch_ros.actions.Node(
package='pubsubpy', node_executable='sub', output='screen')
### こちらにもlaunchしたいノードを記述
### 上記で定義した (例)pub = launch_ros.actions.Node
### の、左辺側の変数を列挙します。
### 記述しなかったら、そのノードは起動しません。
###
### target_action=sub に記述したノードが落ちたら、
### launchで起動したものが一式落ちます。
return launch.LaunchDescription([
pub,
sub,
# TODO(wjwwood): replace this with a `required=True|False` option on ExecuteProcess().
# Shutdown launch when client exits.
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=sub,
on_exit=[launch.actions.EmitEvent(
event=launch.events.Shutdown())],
)),
])
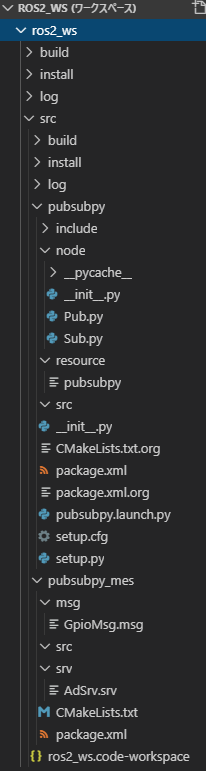
最終的には、下記のようなディレクトリ構成・ファイル構成になります。
(3)ビルド
注意:launchファイルは、 --symlink-installが効かないので、編集する度に必ずビルドして下さい
~/ros2_ws/src/pubsubpy$ cd ../..
~/ros2_ws$ colcon build --symlink-install
Starting >>> pubsubpy_mes
Finished <<< pubsubpy_mes [8.83s]
Starting >>> pubsubpy
Finished <<< pubsubpy [15.8s]
Summary: 2 packages finished [26.7s]
# 環境変数の読み込み
~/ros2_ws$ source ./install/setup.bash
(4)実行
eloquent以前
実行中は、コンソール上のメッセージが出てきません。(たまに流れてくるときもあります・・・)
[Ctrl-C]すると、バッファに貯まっていたメッセージが一気に流れてきます。
foxy以降 (21/3/18追記)
実行中は、すぐにコンソール上にメッセージが出てきます。
~/ros2_ws$ ros2 launch pubsubpy pubsubpy.launch.py
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2019-10-14-19-46-14-616087-raspi3u-23637
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [pub-1]: process started with pid [23708]
[INFO] [sub-2]: process started with pid [23709]
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[sub-2] [INFO] [mysub]: mysub initializing...
[sub-2] [INFO] [mysub]: mysub do...
[sub-2] [INFO] [mysub]: Subscription > Port: 0 Value: 0
[sub-2] [INFO] [mysub]: Subscription > Port: 0 Value: 1
[sub-2] [INFO] [mysub]: mysub done.
[INFO] [pub-1]: process has finished cleanly [pid 23708]
[INFO] [sub-2]: process has finished cleanly [pid 23709]
[pub-1] [INFO] [mypub]: mypub initializing...
[pub-1] [INFO] [mypub]: mypub do...
[pub-1] [INFO] [mypub]: Publish [0]
[pub-1] [INFO] [mypub]: Publish [1]
[pub-1] [INFO] [mypub]: mypub done.
Task exception was never retrieved
future: <Task finished coro=<LaunchService._process_one_event() done, defined at /opt/ros/dashing/lib/python3.6/site-packages/launch/launch_service.py:175> exception=InvalidHandle('Asked to destroy handle, but it was already destroyed',)>
Traceback (most recent call last):
File "/opt/ros/dashing/lib/python3.6/site-packages/launch/launch_service.py", line 177, in _process_one_event
await self.__process_event(next_event)
File "/opt/ros/dashing/lib/python3.6/site-packages/launch/launch_service.py", line 186, in __process_event
entities = event_handler.handle(event, self.__context)
File "/opt/ros/dashing/lib/python3.6/site-packages/launch/event_handlers/on_shutdown.py", line 67, in handle
return self.__on_shutdown(cast(Shutdown, event), context)
File "/opt/ros/dashing/lib/python3.6/site-packages/launch_ros/default_launch_description.py", line 39, in _shutdown
self.__launch_ros_node.destroy_node()
File "/opt/ros/dashing/lib/python3.6/site-packages/rclpy/node.py", line 1408, in destroy_node
self.handle.destroy()
File "/opt/ros/dashing/lib/python3.6/site-packages/rclpy/handle.py", line 92, in destroy
raise InvalidHandle('Asked to destroy handle, but it was already destroyed')
rclpy.handle.InvalidHandle: Asked to destroy handle, but it was already destroyed
~/ros2_ws$
-
(12/14追記)
- コメントに頂いたとおり、メッセージを即出力したい場合は、
print関数を使って下さい。 -
get_logger().warnや、get_logger().errorなど緊急度の高いメッセージは、バッファされること無く即出力される事を確認しました
- コメントに頂いたとおり、メッセージを即出力したい場合は、
2.systemdからroslaunchを起動
一通り試作が終わって本番に適用する際に、装置(RaspberryPi)の電源が入ってLinuxが立ち上がったら、自動的にROS2のノードも立ち上げが必要になります。
ここでは、systemdからlounchする方法を解説します。
(1)考え方
-
pubsubpy.shに起動コマンドros2 launch pubsubpy pubsubpy.launch.pyを記述 -
systemdからpubsubpy.shを起動 - コンソールに出てくる情報は、
./log/pubsubpy.logに出力 -
./log/pubsubpy.logは定期的にlogrotateする
(2)ファイルの準備
~/ros2_ws/$ cd src/pubsubpy
~/ros2_ws/src/pubsubpy$ touch pubsubpy.sh pubsubpy.service pubsubpy.logrotate
~/ros2_ws/src/pubsubpy$ mkdir log
pubsubpy.sh
# !/bin/bash
# --------------------------------------------------------------------
# バックグラウンド実行用のスクリプト
# --------------------------------------------------------------------
# 変数の設定
SCRIPTDIR=/home/ubuntu/ros2_ws/src/pubsubpy/
LOGDIR=$SCRIPTDIR/log
ENVFILE=/home/ubuntu/ros2_ws/install/setup.bash
# 実行
if [ -f ${ENVFILE} ]; then
#環境変数読み込み
echo "Loading ROS2 Env..."
source /home/ubuntu/ros2_ws/install/setup.bash
if [ -d ${LOGDIR} ]; then
echo "ROS2 Launching..."
#スタンドアロンで起動する場合に必須の項目
#ネットワーク上で一意にするための値
export ROS_DOMAIN_ID=232
#DDSの通信先ホストを限定する
export ROS_ALLOWED_HOSTS="localhost.local:robot_1.local"
#roslaunch実行
exec ros2 launch pubsubpy pubsubpy.launch.py >> ${LOGDIR}/pubsubpy.log 2>&1
else
echo "There is no ${LOGDIR}"
fi
else
echo "There is no ${ENVFILE}"
fi
pubsubpy.service
[Unit]
Description=ROS2 launch test
After=local-fs.target
ConditionPathExists=/home/ubuntu/ros2_ws/src/pubsubpy
[Service]
ExecStart=/home/ubuntu/ros2_ws/src/pubsubpy/pubsubpy.sh
ExecStop=/bin/kill ${MAINPID}
Restart=on-failure
StartLimitInterval=60
StartLimitBurst=3
KillMode=mixed
Type=simple
User=pi
Group=pi
[Install]
WantedBy=multi-user.target
systemdに登録する
# serviceファイルをシンボリック(cpしてもOK)
$ sudo ln -s /home/ubuntu/ros2_ws/src/pubsubpy/pubsubpy.service /etc/systemd/system
# デーモンを有効化
$ sudo systemctl enable pubsubpy.service
# 起動
$ sudo systemctl start pubsubpy.service
# ステータスを確認
$ systemctl status pubsubpy.service
上記の例では、pubsubpy.serviceファイルをシンボリックリンクしてますが、コピーしても構いません。
(覚え書き)
デーモンをsudo systemctl disable pubsubpy.serviceで無効化したときに、
- シンボリックリンク
- pubsubpy.serviceのシンボリックリンクが消える(ので、enableする前にもう一度シンボリックリンクを作る必要がある)
- コピー
- pubsubpy.serviceファイルは残る
このような挙動の違いがあります。
(3)logrotateの設定
pubsubpy.logrotate
# ---------------------------------------------------------------------
# pubsubpy.logrotate
# ---------------------------------------------------------------------
/home/ubuntu/ros2_ws/src/pubsubpy/log/pubsubpy.log {
daily
missingok
rotate 15
compress
delaycompress
notifempty
copytruncate
su ubuntu ubuntu
}
| コマンド | 意味 | 他のコマンド |
|---|---|---|
| daily | 毎日ローテート | weekly/monthly/yearly |
| missingok | ログファイルが無くてもエラーにしない | nomissingok |
| rotate15 | ログの世代数(例は15ファイル、15日分) | 0にすると残さない |
| compress | 古いログファイルをgzipで圧縮 | nocompress |
| delaycompress | 古いログの1世代目だけは圧縮しない | - |
| notifempty | 空ファイルはローテートしない | ifempty |
| copytruncate | 更新中のログファイルを別名ファイルにcpしてから、元のログファイルを空にする | - |
| su ubuntu ubuntu | 処理する時のユーザ/グループを指定 | - |
~/ros2_ws/src/pubsubpy/log/ディレクトリは、この時点ではubuntu:ubuntuです。
logrotateに登録する
# logrotateの設定ディレクトリに移動
$ cd /etc/logrotate.d
# logrotateファイルをコピー(シンボリックリンクは不可)
$ sudo cp ~/ros2_ws/src/pubsubpy/pubsubpy.logrotate ./pubsubpy
# パーミッションを変更
$ sudo chmod 644 pubsubpy
# logrotateに登録
$ sudo logrotate -f ./pubsubpy
これでログが自動的にローテーションします。
動作チェックは、下記のようにします。
$ sudo /usr/sbin/logrotate -f /etc/logrotate.d/uecsd
$ ls -la /home/ubuntu/ros2_ws/src/pubsubpy/log/
合計 592
drwxrwxr-x 2 pi pi 4096 1月 6 09:03 .
drwxr-xr-x 5 pi pi 4096 1月 6 08:59 ..
-rw-r--r-- 1 pi pi 0 1月 6 09:03 pubsubpy.log
-rw-r--r-- 1 pi pi 8238 1月 6 09:03 pubsubpy.log.1
-rw-r--r-- 1 pi pi 583851 1月 6 09:03 pubsubpy.log.2.gz
pubsubpy.logに番号がついて、古いものはgz圧縮されています。
エラー例
(1)下記のエラーが出た場合は、改行コードをLFに変更してください。
$ sudo logrotate -f ./pubsubpy
error: pubsubpy:10 lines must begin with a keyword or a filename (possibly in double quotes)
error: pubsubpy:11 lines must begin with a keyword or a filename (possibly in double quotes)
error: pubsubpy:19, unexpected text after }
(2)下記のエラーが出た場合は、設定ファイルのパーミッションを644にしてください。(シンボリックリンクを使うと、ファイルのパーミッションが777になるので、このエラーの回避が出来なくなります)
$ sudo logrotate -f ./pubsubpy
error: Ignoring poka because of bad file mode - must be 0644 or 0444.
(3)下記のエラーが出た場合は、~/ros2_ws/src/pubsubpy/log/のパーミッションが合っていません。設定ファイルのsu項目で、該当ディレクトリのユーザ・グループを合わせてください。
error: skipping "/home/ubuntu/ros2_ws/src/pubsubpy/log/poka.log" because parent directory has insecure permissions (It's world writable or writable by group which is not "root") Set "su" directive in config file to tell logrotate which user/group should be used for rotation.
3.その他のTips
(1)ROS2をスタンドアロンで動かすとき
とある用途で、ネットワークの繋がらない現場で使う装置に、ROS2を使ったところ、正常に動かない現象が発生しました。
ハマった状況
- 環境
- ROS2 Dashing
- Ubuntu 18.04
- Raspberry Pi 3+
- 状況
- ネットワーク(LAN / Wifi)に繋がっていないとき
-
ros2 lainch ...で複数のノードを立ち上げた →ros2 node listやros2 topic listで検索しても、一部のノードやトピックが見えない。
- 再度
ros2 lainch ...で立ち上げ直しても、やはり見えない。見えなくなってるノードの再現性も無い。(別のノードが見えたり、消えたりしている) - ros2 run ...でで個別に立ち上げても同様。
-
- ネットワーク(LAN / Wifi)に繋がっているとき
-
ros2 lainch ...で複数のノードを立ち上げた →ros2 node listやros2 topic listで検索すると、必要なノード・トピックが全て見える
-
- ネットワーク(LAN / Wifi)に繋がっていないとき
スタンドアロンで動かすための処置
下記の環境変数を設定します。
このようにしても、正常に立ち上がらない例がありました。いまのところ、完全な回避作は見つかってません。(19/11/12追記)
# ネットワーク上で一意にするための値
export ROS_DOMAIN_ID=<任意の数字 0~232>
# DDSの通信先ホストを限定する
export ROS_ALLOWED_HOSTS="localhost.local:robot_1.local"
ROS_DOMAIN_IDは、同じ値の環境変数から起動したノード間だけで通信出来るようにします。
ROS_ALLOWED_HOSTSは、値に指定したホストとだけ通信できるようにします。
同一のLANネットワーク上でROS2の環境が存在するときに、混信を防ぐための仕組みですが、スタンドアロン環境でも設定が必須です。
(ROS_ALLOWED_HOSTSに言及している資料が大変少ないので、こちらがどんな効果が有るのかはは良く解りません・・・)
参考
- https://index.ros.org/doc/ros2/Concepts/Overview-of-ROS-2-concepts/#discovery
- https://github.com/ros2/ros2/issues/798
- https://answers.ros.org/question/319723/use-ros2-fastrtps-with-standalone-fastrtps-programs/
(2)ROS_DOMAIN_IDの設定範囲
同じネットワークに、複数のROS2環境が混在すると混信が発生します。
(ハンズオンなどをすると、その際中に経験します・・・)
0~65535までの任意の値を設定出来るようですが・・・本当にその範囲に割り当て出来るかを確認してみました。
結論
- 0~232
範囲の確認方法
環境変数に適当な数字を入れると範囲を教えてくれます。最終的に、RTPS のほうが範囲の指定をしてきます。
~$ export ROS_DOMAIN_ID=65500
~$ ros2 node list
Traceback (most recent call last):
File "/opt/ros/dashing/bin/ros2", line 11, in <module>
・・・(省略)・・・
OverflowError: getsockaddrarg: port must be 0-65535.
~$ export ROS_DOMAIN_ID=233
~$ ros2 node list
Calculated port number is too high. Probably the domainId is over 232 or portBase is too high.
2019-11-06 12:28:17.342 [RTPS Error] Calculated port number is too high. Probably the domainId is over 232 or portBase is too high. -> Function getMulticastPort
~$ export ROS_DOMAIN_ID=232
~$ ros2 node list
~$
参考
- https://github.com/ros2/rmw_fastrtps/issues/261
- https://index.ros.org/doc/ros2/Contributing/ROS-2-On-boarding-Guide/#get-a-personal-ros-domain-id
おわりに
ROS2の勉強を19年7月から始めたのですが、やはりPython3のまとまった作例が少なかったので、覚え書きを兼ねてまとめを作ってみました。(特にlounchファイルのサンプルが少ないこととか、スタンドアロン環境でROS_DOMAIN_IDが必須なこととか・・・)
参考になりましたら幸いです。
参考資料
- https://index.ros.org/doc/ros2/Installation/Eloquent/Linux-Development-Setup/
- https://www.theconstructsim.com/ros2-tutorials-5-how-to-create-a-ros2-package-for-python-update/
- https://qiita.com/NeK/items/c9ba8aa3a005087762e2
- https://qiita.com/l1sum/items/6acabc94b040f8b0f7cd
- https://gbiggs.github.io/rosjp_ros2_intro/
- https://github.com/ros2/tutorials/
- https://index.ros.org/doc/ros2/Tutorials/
- https://milestone-of-se.nesuke.com/sv-basic/linux-basic/logrotate/