・面積計算は,入試の軌跡 様のガウス・グリーンの定理を参照しました.
オリジナル
2016東京工業大学 前期【5】
入試の軌跡 様
ジャンプの調子が悪い時、(タブレットの場合)
https://math4u.site/
望星塾 様
上と同じです。大学入試数学問題集成 様>テキスト【5】
ChatGPT-3.5先生へ(???わかりませんでした。???)
次のように媒介変数表示されたxy平面上の曲線をCとする:
x=3cost-cos3t
y=3sint-sin3t
ただし0≦t≦π/2 である.
(1) dx/dtおよびdy/dtを計算し,Cの概形を図示せよ.
(2) Cとx軸とy軸で囲まれた部分の面積を求めよ.
??? 返信抜粋
>...これを計算することで、Cとx軸、y軸で囲まれた部分の面積が求められます。
sympyで教えて下さい
以下、ChatGPT-3.5先生の出力を修正できませんでした。
# ChatGPT-3.5先生の出力
from sympy import *
# from sympy import symbols, cos, sin, integrate
# 変数を定義
t = symbols('t')
# 曲線のパラメータ方程式
x = 3*cos(t) - cos(3*t)
y = 3*sin(t) - sin(3*t)
# dx/dt と dy/dt を計算
dx_dt = x.diff(t)
dy_dt = y.diff(t)
# 積分して面積を求める
area = integrate(abs(dx_dt - dy_dt), (t, 0, 0.5 * pi))
# 結果を表示
print("Cとx軸、y軸で囲まれた部分の面積: ", area.evalf())
WolframAlphaで
・グラフがでます。
・わかりませんでした。
sympyで(オリジナル 様の方法で)
勉強中。
sympyで(「2022産業医科大学医学部【3】」風で)
・面積計算は,入試の軌跡 様のガウス・グリーンの定理を参照しました.
・sympy.simplify.fu.TR9(rv)
https://docs.sympy.org/latest/modules/simplify/fu.html#sympy.simplify.fu.TR9
# ver0.1
from sympy import *
from sympy.simplify.fu import TR9
var('f,a,b',real=True,nonnegative=True)
var('θ1,θ2',real=True,nonnegative=True)
var('ω1,ω2',real=True,nonnegative=True)
var('t,Φ' ,real=True,nonnegative=True)
(Tp,a,b,f)=(2*pi,3,1,0)
O=Point(0,0)
# ------------------------------------------------------------------
P=(Point(f,0)+Point(a*cos(θ1),a*sin(θ1)))
S=(P +Point(b*cos(θ2),b*sin(θ2)))
# ------------------------------------------------------------------
Φ=0
rep_θt={θ1:ω1*t,θ2:ω2*t+Φ}
# ------------------------------------------------------------------
(P,S) =(P.subs(rep_θt),S.subs(rep_θt))
PS = O.distance(P)-O.distance(S)
Φ_sol =Φ
ω1_sol=1
ω2_sol=3*ω1_sol #角速度? 3倍
rep={ω1:ω1_sol,ω2:ω2_sol}
ff=S.x.subs(rep)
gg=S.y.subs(rep)
print("#(1)" ,TR9(diff(ff)))
print("#(1) ",TR9(diff(gg)))
print("#(2)" ,Rational(1,2)*integrate(ff*diff(gg)-diff(ff)*gg,(t,0,pi/2)))
# #########################################################################
# 図1------------------------------------------------------------------
tHani=(t,0,2*pi)
pl_Pt=plot(diff(ff),tHani,show=False,aspect_ratio=(1.0,0.5),ylim=(-8,8))
pl_St=plot(diff(gg),tHani,show=False)
pl_Pt.extend(pl_St)
pl_Pt.show()
# 図2------------------------------------------------------------------
P=(Point(f,0)+Point(a*cos(θ1),a*sin(θ1))).subs(rep_θt).subs({ω1:ω1_sol,ω2:ω2_sol,Φ:Φ_sol})
S=(P +Point(b*cos(θ2),b*sin(θ2))).subs(rep_θt).subs({ω1:ω1_sol,ω2:ω2_sol,Φ:Φ_sol})
# (st,en)=(0,1.0)
(st,en)=(0,2*pi)
ax1=plot_parametric(P.x,P.y,(t,st,en),aspect_ratio=(1.0,1.0),
# line_color="blue",
show=False
)
ax2=plot_parametric(S.x,S.y,(t,st,en),
# line_color="blue",
show=False
)
# ------------------------------------------------------------------
def myPlotLineOPS1(tOP,O,P,S):
var('u' ,real=True)
OPu=O+u*Point(P.x,P.y).subs({t:tOP})
PSu= 1*Point(P.x,P.y).subs({t:tOP})+u*Point(S.x-P.x,S.y-P.y).subs({t:tOP})
ay1=plot_parametric(PSu.x,PSu.y,(u,0,1),line_color="black",
show=False
)
return ay1
def myPlotLineOPS2(tOP,O,P,S):
var('u' ,real=True)
OPu=O+u*Point(P.x,P.y).subs({t:tOP})
PSu= 1*Point(P.x,P.y).subs({t:tOP})+u*Point(S.x-P.x,S.y-P.y).subs({t:tOP})
ay2=plot_parametric(PSu.x,PSu.y,(u,0,1),line_color="black",
show=False
)
return ay2
def myPlotLineOPS4(tOP,O,P,S):
var('u' ,real=True)
OPu=O+u*Point(P.x,P.y).subs({t:tOP})
PSu= 1*Point(P.x,P.y).subs({t:tOP})+u*Point(S.x-P.x,S.y-P.y).subs({t:tOP})
ay4=plot_parametric(PSu.x,PSu.y,(u,0,1),line_color="black",
show=False
)
return ay4
def myPlotLineOPS6(tOP,O,P,S):
var('u' ,real=True)
OPu=O+u*Point(P.x,P.y).subs({t:tOP})
PSu= 1*Point(P.x,P.y).subs({t:tOP})+u*Point(S.x-P.x,S.y-P.y).subs({t:tOP})
ay6=plot_parametric(PSu.x,PSu.y,(u,0,1),line_color="black",
show=False
)
return ay6
ax1.extend(ax2)
ax1.extend(myPlotLineOPS1(1/8*pi,O,P,S))
ax1.extend(myPlotLineOPS2(2/8*pi,O,P,S))
ax1.extend(myPlotLineOPS4(3/8*pi,O,P,S))
ax1.extend(myPlotLineOPS6(4/8*pi,O,P,S))
ax1.show()
# 図3------------------------------------------------------------------
Pt=(O.distance(P)).subs({ω1:ω1_sol})
St=(O.distance(S)).subs({ω1:ω1_sol,ω2:ω2_sol,Φ:Φ_sol})
# tHani=(t,0,1.5)
tHani=(t,0,2*pi)
pl_Pt=plot(Pt,tHani,show=False,aspect_ratio=(1.0,1.0),ylim=(0,9))
pl_St=plot(St,tHani,show=False)
pl_Pt.extend(pl_St)
pl_Pt.show()
#(1) -6*sin(2*t)*cos(t)
#(1) 6*cos(t)*cos(2*t)
#(2) 3*pi
図1
・点P?が 1周(0≦t≦2*π) dx_dt,dy_dt
・増減表作成アプリを勉強中。

図2
・点P?が 1周(0≦t≦2*π) 平面図軌跡
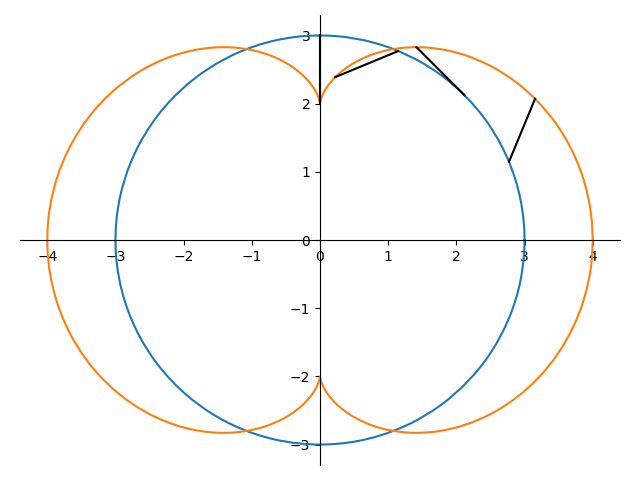
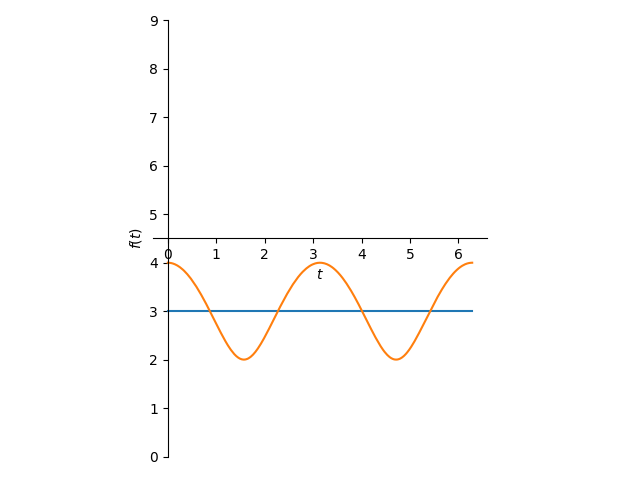
図3
・点P?が 1周(0≦t≦2*π) 原点からの距離
いつもの? sympyの実行環境と 参考のおすすめです。
(テンプレート)
いつもと違うおすすめです。