これは「toio™(ロボットトイ | toio(トイオ)) Advent Calendar 2019」の21日目の記事になります。
はじめに
toioにカメラを載せたり、TouchDesignerとOSCで通信できるようにしました。
toioに物を載せたり、他のアプリと通信する時の参考になればと思います。
やったこと
- toio に DSC-RX0 をレゴパーツを組み合わせて固定した
- toio.py で倒れないように加速度を調節した
- Python TouchDesigner の間をOSCで繋いだ
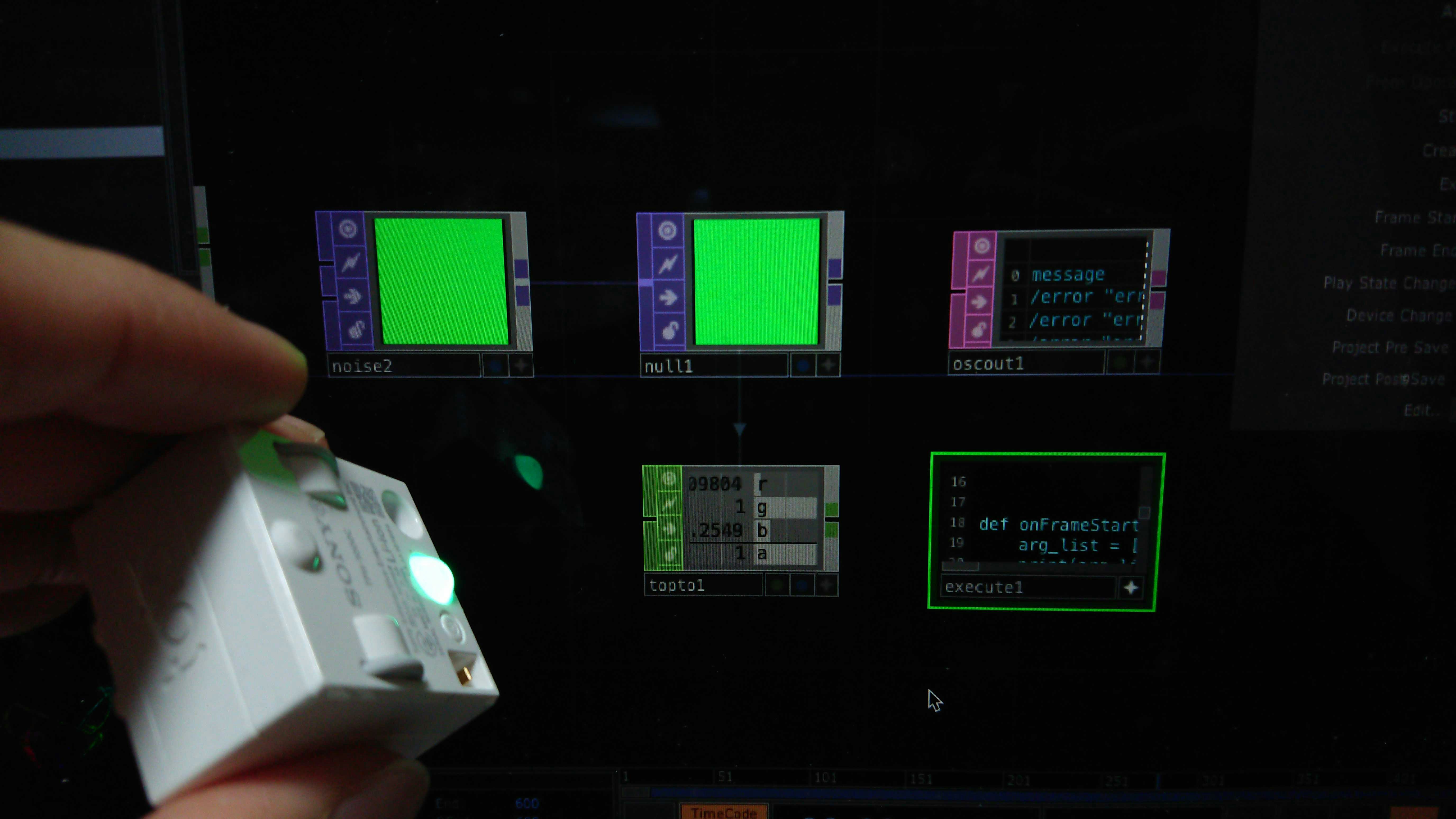
- TouchDesingerで生成した色と同じ色がLEDで光るようにした(通信テスト)
環境
- MacBook Pro (2.7 GHz Intel Core i5,16 GB 1867 MHz DDR3)
- macOS Catalina
- python 2.7
toio に カメラを載せて速度制御する
一気に止めるとこれ pic.twitter.com/M9GR241T3i
— 水落 大 mizumasa (@_mizumasa) December 21, 2019
モーターの速度60ぐらいだと急に止めても大丈夫ですが、速度100から0に一気に落とすと倒れます。
0.3sぐらいかけて100から0まで滑らかにスピードを落とすようにすると倒れずにすみます。
toio.pyに滑らかに速度を変化させる関数 write_data_motor_smooth 追加しました。
ちなみにこうなってます。

円形プレートに穴を開けて、ポッチ2x2に収まる三脚ネジが通るようにしています。
オーディオファン ストラップアダプター 1/4インチ 三脚 ネジ穴用 2個セット オーディオファン
OSCでTouchDesignerと繋ぐ
TouchDesignerからOSCでtoioのLED光らせられるようにした。分かりにくいけどこんな感じ#toio #touchdesigner #python pic.twitter.com/zHnLuPGhrv
— 水落 大 mizumasa (@_mizumasa) December 21, 2019
環境構築
以前作成した Python 環境で使えるtoioライブラリ toio.py を使用します。
インストール方法はこちら -> 「toio を Mac + Python で制御できるライブラリつくった」
加えて今回は、python用OSC通信ライブラリ pyOSC をインストールしておきます。

今回の記事は経過だけでしたが、これで何をつくるのか、またどこかで共有させて頂きたいと思いますのでお楽しみに。