cylonjsでの制御
https://cylonjs.com/documentation/platforms/crazyflie/
px4での制御
http://dev.px4.io/hardware-crazyflie2.html
cylonjsでの操作は今はエラーになるので、何かのバージョンの問題が出てる可能性あり。
ドローンのオートパイロット(フライトコントローラ)について
ここでは、どのようなオートパイロットがあり、あなたのドローンを購入する際に考慮すべき重要な要素について説明します。私はまた、フライトコントローラの様々な種類やカテゴリについて説明します。
フライトコントローラまたはオートパイロットの違いは?
フライトコントローラは航空機の安定を維持するだけの装置です。
ほとんどのミニレーシングクワッドローター上の例として、あなたの飛行を保つことができるフライトコントローラを使用し、常にパイロット入力に基づいてモータを送信するために最善のコマンドを計算します。マッピングドローンのようなものは、安定した航空機を維持するGPSなどのフライトコントローラや他の機器を含む任意の自動操縦システムを持つことになります。
オートパイロットシステムのコンポーネント
フライトコントローラー
フライトコントローラは、あなたのドローンの脳です。フライトコントローラは、センサデータのすべてを読み取り、それが飛ぶようにするためにあなたのドローンに送信するための最良のコマンドを計算します。
プロセッサ
これは、自動操縦装置のファームウェアを実行し、すべての計算を行い、中央ユニットです。ほとんどのフライトコントローラは、8ビットのシステムよりも強力である32ビットプロセッサを持っていますが、非常に安くオンラインで見つけることができるようardupilotメガなど、いくつかの人気のある8ビットの自動操縦のプラットフォームはまだあります。

通常、フライトコントローラ上のほとんどのコネクターとの最大のチップは、メインプロセッサであります
加速度センサーとジャイロスコープ
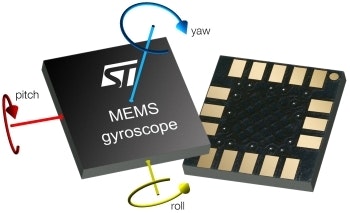
これらはあなたのドローンにintertialセンサです。加速度計は、加速力、およびジャイロ措置回転力を測定します。これらの測定値を組み合わせることによって、フライトコントローラは、ドローン現在の姿勢(それに飛んでいる角)を計算し、必要な修正を行うことができます。
コンパス(磁力計)
コンパスセンサ、または磁力あなたが派手な音にしたい場合は、ちょうどコンパスのように、磁力を測定します。加速度計とジャイロセンサは、飛行コントローラはドローンが向いているどのような方向をお知らせするのに十分ではないため、このセンサは、マルチローター無人機のために重要です。固定翼無人機で、それ以来、この簡単では一方向のみに飛ぶことができます。
コンパスセンサは磁気干渉に非常に敏感です。このようなワイヤ、モーターやESCのようなものは、すべての磁気干渉を引き起こす可能性があります。あなたは多くの場合、GPSモジュールとしてGPSモジュールに搭載された追加のコンパスセンサは、通常、遠く離れた他のすべての機器から搭載されている必要がありますなぜそれがあります。また、最初の時間のためにあなたのドローンを構築するときにコンパスを校正する必要があります。
バロメーター
バロメーターでは、航空機の高度を測定するために使用する圧力センサです。これらの圧力センサは、無人機が数センチ移動するときに空気圧の変化を検出することができるように敏感です。
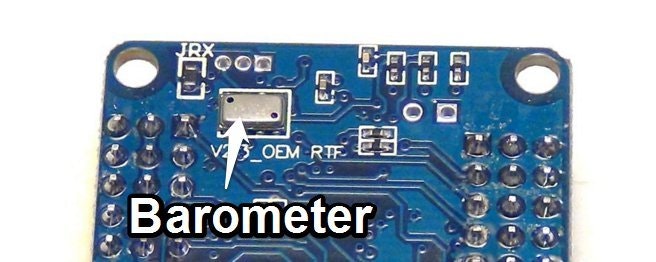
flip32 +フライトコントローラの下側に取り付けられた気圧センサー
対気速度センサー
これは、固定翼無人機で使用されているものです。対気速度センサは、圧力センサの別の形態であるが、代わりに高度を測定することにより、高速の空気は、この措置は、航空機が通過しています。これは、ピトー管を介して動的および静的圧力を比較することによってこれを行います。

翼の上に気流が揚力を発生させ、あなたがあまりにもゆっくりと飛んでいる場合は、あなたの飛行機をストールやクラッシュに終わることができるものであるとして、対気速度は、固定翼機のために重要です。
データロギング(ブラックボックス)
Pixhackなどの一部のフライトコントローラは、ちょうど航空機上のブラックボックスのようなあなたの自動操縦がやっているすべてのもののログを格納するデータロギングにたて含みます。あなたはログを見ることができるように正常に動作していない何かが、問題を見つけるために、より多くを学ぶ方法についての私たちのガイドをチェックアウトする場合、これは特に便利ですarducopterのログを分析します
センサーフュージョンは
単一センサは、あなたのドローンを制御するのに十分ではありません。いくつかの空想の数学(カルマンフィルタを)あなたの無人機にすべてのセンサからの測定値を組み合わせて、適用することにより、自動操縦は非常に効果的にあなたの航空機の安定を維持することができます。
オートパイロットのための買い物するときは、DOFと呼ばれるもの、または自由度に出くわすかもしれません。最も基本的なフライトコントローラは、それらが3軸加速度計および3軸ジャイロを有することを意味する6自由度です。その他のフライトコントローラは、彼らが3軸加速度計、3軸ジャイロ、3軸コンパスと10の事柄の測定を可能にするバロメーターのような複数のセンサを含む意味10DOF。
アプリケーションによっては安価な6自由度の飛行コントローラを使用すると、レーシングFPVのクワッドローターを構築しているときのように、最良の選択肢である私。しかし、あなたはより多くの機能と優れたパフォーマンス、そのあなたがGPSモジュールを追加するときは、次にウェイポイントナビゲーションなど、より高度な機能を使用することができるように10 DOF飛行コントローラを取得することをお勧めしたい場合。
GPS
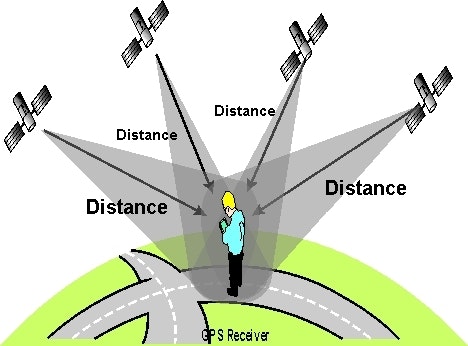
GPSモジュールは、信号が衛星から旅行にかかる時間を測定することによって、あなたの無人偵察機の位置を測定します。GPSモジュールはまたあなたの無人機の高度の推定を与えることができます。しかし、GPSモジュールはかなり不正確であり、唯一の5メートル以内にあなたの位置を与えます。他のセンサあちこちの測定値を組み合わせることによって、前に説明したようにしかし、フライトコントローラはドローンが何をしているかのより良い画像を得ることができます。GPSモジュールによって使用される主な機能は、あなたのドローンは、潜在的に離陸から着陸まで独自に飛ぶことができるので、あなたが自律的に、ウェイポイントにあなたのドローンを飛ぶことができるということです。
衛星ネットワークスは
最近、このようなロシアのGLONASSネットワークとしてGPSネットワーク上よりも上で通信するために阿部されているモードのGPSモジュールがあります。これは、ちょうどあなたのGPS受信機がピックアップtehの信頼性とパフォーマンスを向上させ、より衛星信号を得ることを意味します。良い点は、彼らがはるかに高価ではないということです。Ubloxネオ7Nであり、GPSとGLONASSネットワークの両方をサポートする共通モジュールUbloxネオM8N 133モジュール。
あなたのGPSモジュールを搭載
GPSモジュールが空を見る必要があるので、多くの場合、あなたのドローンの上部に取り付けられています。マルチロータに飛行すると、ほとんどのドローンビルダーは、それが固体のGPS信号を確実に受けるようにするためにあちこちアップ高離れて他のすべての電子機器をGPSモジュールを搭載するGPSマストを使用します。

GPSモジュールは、多くの場合、他の電子機器の干渉から遠く離れて取り付けられているので前述したように、それはまた、コンパスセンサが含まれています。
テレメトリおよび地上局
テレメトリーは、あなたのドローンとあなたの地上局との間でデータを送受信するために使用するものです。あなたのドローンにテレメトリを追加するのはとても便利ですが、必須ではありません。

ardupilot / arducopterの自動操縦システムは、Androidデバイスがあなたの地上管制局として使用することができます。
地上局
地上局は、いくつかのPC上で動作するソフトウェア、またはあなたのドローンが飛んでいる場合には、監視新しいウェイポイントを設定し、またはそのようなあなたをフォローなど、他のコマンドを実行するためにあなたのドローンを伝えるために使用することができる錠剤です。ほとんどのドローンパイロットは自分の地上管制局などのスマートフォンやタブレットを使用します。しかし、これを使用するもの、自動操縦に依存することはできないかもしれません。
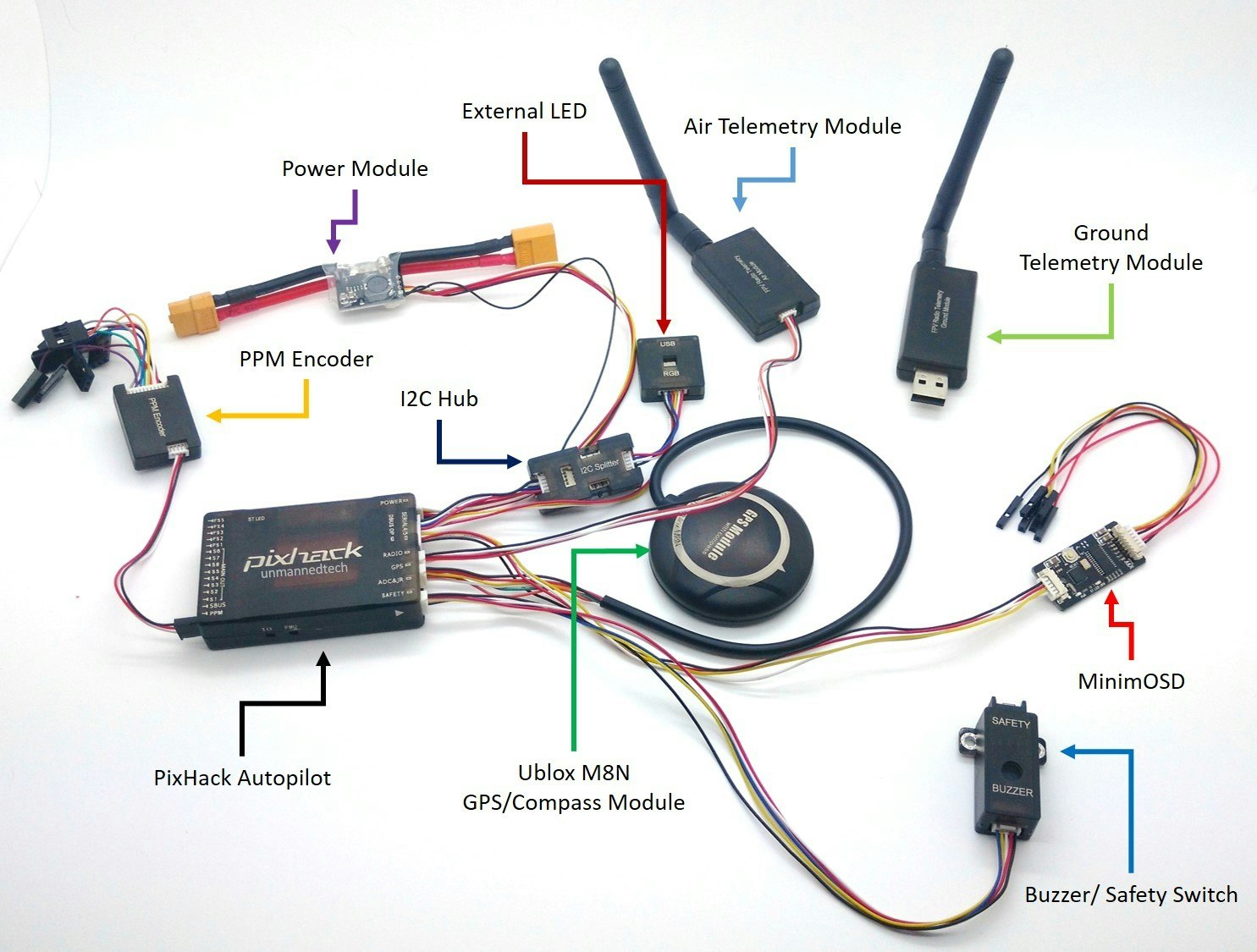
テレメトリは、モジュール
テレメトリモジュールがデータを送受信実際の無線装置です。あなたは地上局装置に差し込ま地面にあなたのドローンオンボード1、及び1を持つことになります。あなたの指定された自動操縦のためのテレメトリモジュールを使用して、最も重要なことは、彼らはしばしば、彼らが通信できるように一緒にペアリングする必要があることです。

例無人遠隔測定キット92 ardupilotオートパイロットシリーズで使用することができます
パワーモジュール
あなたのオートパイロットは、クリーンな電力供給を受けることをその重要な敏感な電子機器であるため。パワーモジュールは、オートパイロットの使用は、(多くの場合、5V)が低電圧まであなたのドローンバッテリからのバッテリ電圧を変換するために使用されます。
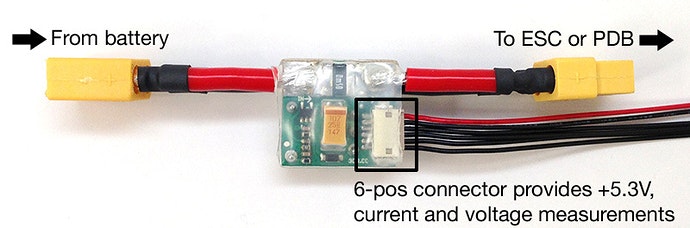
しかし、パワーモジュールを使用することの他の利点は、それはあなたのバッテリ電圧と容量を測定する能力を与えることです。フライトコントローラは、それが土地に警告を表示できるように、バッテリー残量が少なくなったときは、それは知っているバッテリーを測定することができる場合ので、これは便利です。その他の自動操縦システムはまた、いくつかのフェールセーフ機能が自動的に引き継ぎ、バッテリーレベルが低すぎるときに帰って、あなたのドローンをもたらすれる構築しています。
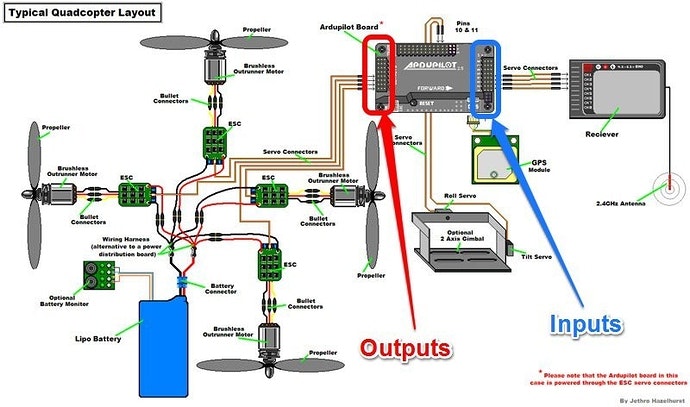
R / C入力および出力
すべてのオートパイロットは、入力と出力コネクタの束を持っています。それでも手動でドローンを制御できるようにするため、R / C入力は、R / Cの受信機に接続するために使用されます。これは、手動でドローンを飛ぶことができます。出力は、以下に示すように、あなたの自動操縦であなたのドローンを制御できるようにあなたがあなたのモータ、またはサーボを接続するものです。
PPMエンコーダは、
一部の自動操縦システムは、単一PPM入力が必要ですが、あなたの受信機は、PWMをサポートする場合があります。この場合、あなたはおそらく、R / C受信機からあなたのPWM出力の全てを取得し、単一のPPM出力にそれらを結合しますPPMコンバータを使用する必要があります。これについての詳細を学ぶために、私たちのチェックアウトのR / C PPM、PWM、SBUSプロトコルガイドを
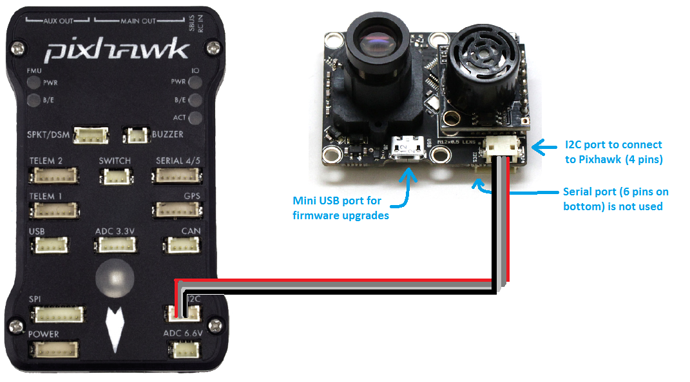
距離センサ
多くのドローンはまた、距離センサを統合する能力を持っています。これらは、超音波のpingを送信し、それはそれの前にバックオブジェクトのバウンスにかかる時間を測定する超音波距離センサの範囲とすることができます。あなたもはるかに大きな範囲と精度を持っているlazersを使用していますが、より高価である光塩基システムを取得します。
距離センサのための一般的なアプリケーションは、地形の高さを変更するように無人機は、地上一定の高度で正確に飛ぶことを可能にするために1直面下向きを持っているので、ドローンはなります。私は下のビデオで示しているの例:
任意の距離センサを購入する前にわずか数センサは、さまざまなプラットフォームでサポートされているように、彼らはあなたの自動操縦システムと互換性があることを確認してください。
オプティックフロー
屋内で飛行する場合、GPS信号を取得しないように設定が可能。下向きオプティックフローセンサを使用することで、あなたが適切なテクスチャー環境上空を飛行している場合は位置を維持するのを助けることが可能です。現在、オプティック・フローは、まだほとんどのDIYドローンオートパイロットのための実験的な機能です。しかし、いくつかのDJIファントム3のような無人偵察機を飛行する準備ができて、そして1インスパイア46は、それらが屋内に飛ぶことができるように、それらに組み込まれ、この機能を持っています。
blog
Crazyflie2.0をUbuntuから操作する [Crazyflie開発その1]
http://qiita.com/ramuda25/items/9d46016ccf3ca715c685
Get Crazyflie Quad Copter working on the Raspberry Pi with a Sony PS3 Bluetooth controller
http://www.josehelps.com/2013/09/get-crazyflie-quad-copter-working-on.html
Flying traffic light
https://www.hackster.io/evoggy/flying-traffic-light-8be87d?ref=part&ref_id=18828&offset=2
dev
http://crazyfliedev.tumblr.com/post/49781346027/simple-python-code-example-for-the-crazyflie
公式
wiki
https://wiki.bitcraze.io/projects:crazyradio:index
購入元
https://www.seeedstudio.com/Crazyflie-2.0-p-2103.html
git
https://github.com/bitcraze/crazyflie-lib-python
https://github.com/hybridgroup/cylon-crazyflie
http://dev.px4.io/