Robust Semi-Supervised Monocular Depth Estimation with Reprojected Distances
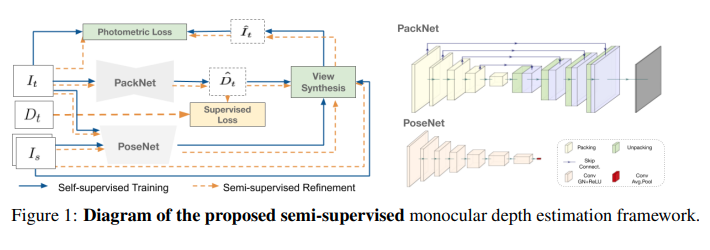 この論文ではReprojection LossというLossを新たに提案している。アルゴリズム
 Lphoto => per-pixel photometric loss Mphoto => カメラと同じ速度で動いている物体とカメラが動いていない時のマスク Lsmooth =>Depthの2回微分 Lrep =>今回提案されるreprojection loss新規性
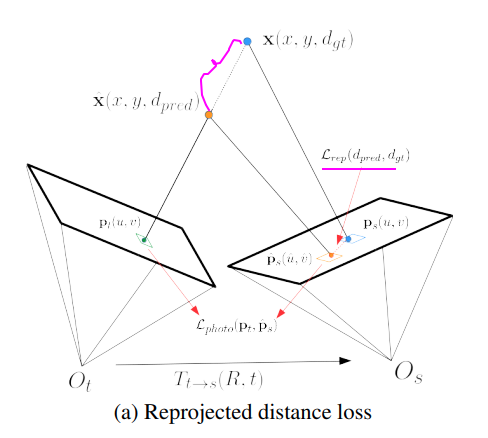 LiDARを使ったSupervise LossはDepth Mapの距離を比較するのだが、 Lrepでは"推定したDepth"と"Ground TruthのDepth"をPoseNetによって推定されたTt->sによってwarpさせる warpした時にDepthが違えばReprojectionされる位置がずれる。その差分をlossとして定義する。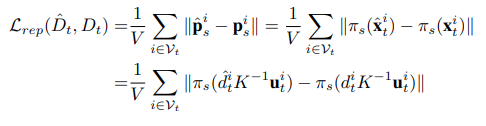
数式で表すとこうなるらしい。