Digging Into Self-Supervised Monocular Depth Estimation
MonoDepth2は従来研究に3つのlossの計算方法を導入しSOTAを獲得した。
新規性
Per-Pixel Minimum Reprojection Loss
 photometric errorを複数のframeから計算し、一番errorが小さいものをlossとして定義する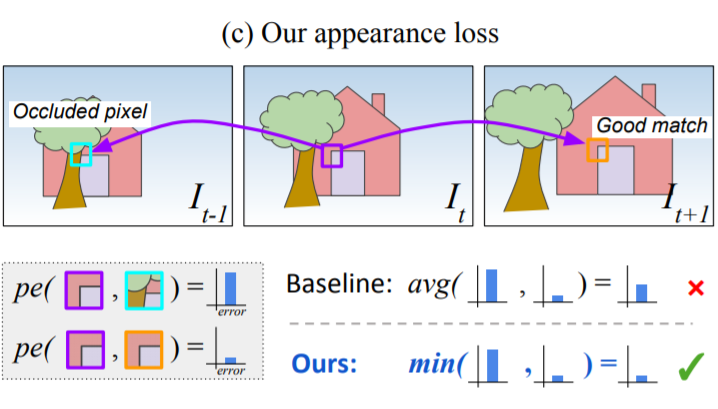
図にあるようにerrorが大きいものはOcclusionとしてと考えられ、それを無視する事でより良いlossを計算できる。
Auto-Masking Stationary Pixels
 左辺:warpさせたImageのphotometric loss 右辺:2つのframe間のPhotometirc Loss左辺が小さい時: 推定が上手くいった時
右辺が小さい時:Cameraが動いていない or 物体が同じ速度で動いている
よって
右辺のが小さい場合にμが0となり、maskingされる。
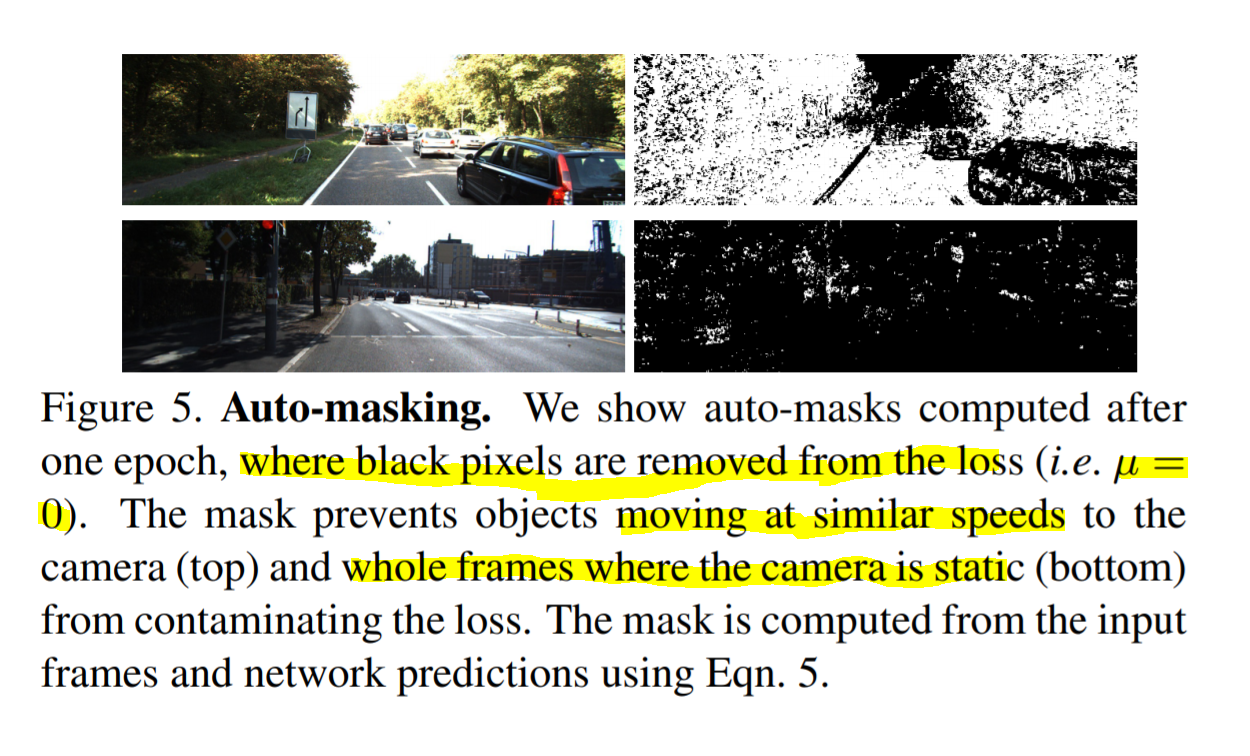
上図: 同じ速度で動いてる物体はmaskingされている
下図: cameraが動いていないので、画像全体がmaskingされている