これ実装済み前提です
IMUドライバ
https://github.com/technoroad/ADI_IMU_TR_Driver_ROS2
参考 https://qiita.com/m2_labo/items/db32061bf3cbfd8f721e
GNSS
https://github.com/KumarRobotics/ublox/tree/galactic-devel
参考 https://qiita.com/m2_labo/items/1ddf05a03a1871ff4a28
basic roboto localization
https://automaticaddison.com/how-to-use-gps-with-the-robot-localization-package-ros-2/
参考 作成中
base_robot_localizationの設定とrobot_localizationの設定を変更
①ros2/src/basic_mobile_robot/basic_mobile_bot_v6.launch.py
変更前
remappings=[('imu', 'imu/data'),
('gps/fix', 'gps/fix'),
('gps/filtered', 'gps/filtered'),
('odometry/gps', 'odometry/gps'),
('odometry/filtered', 'odometry/global')])
変更後
remappings=[('imu', 'imu/data_raw'),
('gps/fix', 'fix'),
('gps/filtered', 'gps/filtered'),
('odometry/gps', 'odometry/gps'),
('odometry/filtered', 'odometry/global')])
②ros2/src/basic_mobile_robot/config/ekf_with_gps.yaml
134、284行目あたり
変更前
imu0: imu/data
変更後
imu0: imu/data_raw
③ros2/src/models/basic_mobile_bot_v1.urdf
変更前
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="-0.10 0 0.05" rpy="0 0 0"/>
</joint>
<link name="imu_link"/>
<joint name="gps_joint" type="fixed">
<parent link="base_link"/>
<child link="gps_link"/>
<origin xyz="0.10 0 0.05" rpy="0 0 0"/>
</joint>
<link name="gps_link"/>
変更後
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu"/>
<origin xyz="-0.10 0 0.05" rpy="0 0 0"/>
</joint>
<link name="imu"/>
<joint name="gps_joint" type="fixed">
<parent link="base_link"/>
<child link="gps"/>
<origin xyz="0.10 0 0.05" rpy="0 0 0"/>
</joint>
<link name="gps"/>
④ros2/src/models/basic_mobile_bot_description/model.sdf
変更前
<link name="imu_link">
<link name="gps_link">
変更後
<link name="imu">
<link name="gps">
実行&確認
f9pとimuをPCに接続
cd ros2
colcon build
source install/setup.bash
以下すべて別のターミナルで実施
gpsとimuを入れ込んで、ekfさせるノードの実行
cd ros2
source install/setup.bash
ros2 launch basic_mobile_robot basic_mobile_bot_v6.launch.py
gpsノードの実行
cd ros2
source install/setup.bash
ros2 launch ublox_gps ublox_gps_node-launch.py
imuノードの実行(ttyACM1は実際のシリアルポートに合わせてください)
cd ros2
source install/setup.bash
ros2 launch adi_imu_tr_driver_ros2 adis_rcv_csv.launch.py mode:=Register device:=/dev/ttyACM1
確認
cd ros2
source install/setup.bash
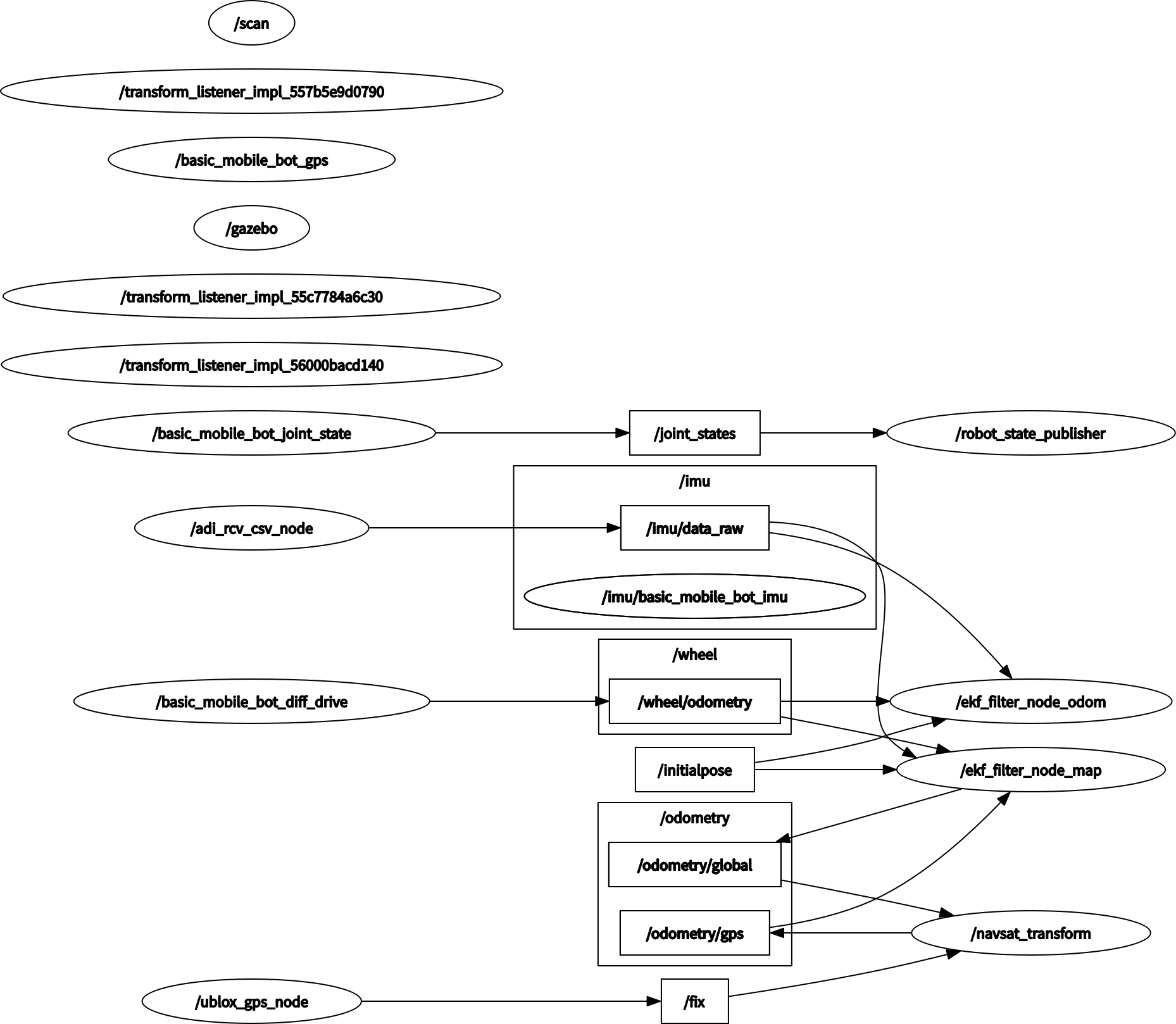
rqt_graph
以下の画像が表示されればOK
cd ros2
source install/setup.bash
ros2 topic echo /odometry/gps
反応あればOK!(反応なければデータいっていない)
次は出力を実環境に持っていく。