はじめに
ステッピングモータを使いたくなったので、購入をしました。
Arduinoスケッチで制御している記事は多くあるのですが、
MicroPythonで制御しているものがなかったので、
紹介させていただきます。
作業環境
- ホストPC
- windows10 64bit Home
- VSCode - 1.47.3
- NodeJS - 12.14.1 LTS
- ターゲットボード
- ESP32-WROOM-32 開発ボード
- MicroPython 1.12(esp32-idf4-20191220-v1.12.bin)
- ESP32-WROOM-32 開発ボード
ESP32におけるMicroPythonの環境構築は、以前記載した
-
[備忘録]ESP32-VSCode-microPythonでの開発環境の構築
を参考にしてください。
機材
| 部品名 | 説明 | 備考 |
|---|---|---|
| ESP32-WROOM-32 開発ボード | 5V | |
| ステッピングモーター | 型番:28BYJ-48、12V駆動 | 購入先Amazon |
| ULN2003ステッピングモーター駆動テストモジュールボード | モータ駆動のためのボード | モータとセット買い |
| DCアダプタ 12V | モータが12V駆動のため | 購入先Amazon |
| ジャンパーケーブル | 10本程度 |
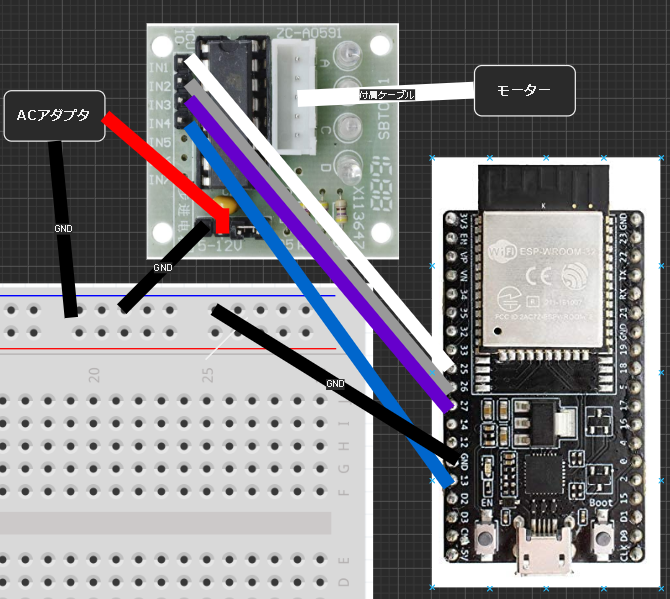
接続
| 部品名 | 説明 | 備考 |
|---|---|---|
| ESP32-PIN25 | テストモジュールボード - IN1 | - |
| ESP32-PIN26 | テストモジュールボード - IN2 | - |
| ESP32-PIN27 | テストモジュールボード - IN3 | - |
| ESP32-PIN13 | テストモジュールボード - IN4 | - |
| ACアダプタ - GND | テストモジュールボード - GND | ESP32-GND |
| ACアダプタ - 12V | テストモジュールボード - 12V | |
| テストモジュールボード - モータコネクタ | ステッピングモータ | - |
コードの作成
Arduino - StepperライブラリをベースにMicroPythonに移植します。
本ライブラリをベースしようと思ったのは、
- Arduinoサイトでよく使われているため、極力インタフェースを同じにしたい
- (そこまで)シビアなタイミングがない
となります。
また、本家との違いは以下となります。
- stop()メソッドを追加している
- step()にて、動作させた後、stop()メソッドをコール
- 本家のライブラリでは、ユーザが能動的にstopさせないと常に電流が流れ続ける
- 熱くなってしまうので、stop()をコールしている
- 5pinモータ機能を削除
- 今回は4pin構成なので、5pin部分は移植なし
ステッピングモータを制御するためのコード
以下がステッピングモータを制御するためのクラスとなります。
stepper.py
import time
from machine import Pin
class Stepper():
def __init__(self, number_of_steps,
motor_pin_1, motor_pin_2, motor_pin_3, motor_pin_4):
self.step_number = 0 # which step the motor is on
self.direction = 0 # motor direction
self.last_step_time = 0 # time stamp in us of the last step taken
self.number_of_steps = number_of_steps # total number of steps for this motor
# setup the pins on the microcontroller:
self.motor_pin_1 = Pin(motor_pin_1, Pin.OUT)
self.motor_pin_2 = Pin(motor_pin_2, Pin.OUT)
self.motor_pin_3 = Pin(motor_pin_3, Pin.OUT)
self.motor_pin_4 = Pin(motor_pin_4, Pin.OUT)
# pin_count is used by the stepMotor() method:
self.pin_count = 4
self.set_speed()
return
def set_speed(self, what_speed=10):
''' Sets the speed in revs per minute
'''
self.step_delay = 60 * 1000 * 1000 // self.number_of_steps // what_speed
return
def step(self, steps_to_move, auto_stop=True):
''' Moves the motor steps_to_move steps. If the number is negative,
the motor moves in the reverse direction.
'''
steps_left = abs(steps_to_move) # how many steps to take
# determine direction based on whether steps_to_mode is + or -:
self.direction = 1 if steps_to_move > 0 else 0
# decrement the number of steps, moving one step each time:
while steps_left > 0:
now = time.ticks_us()
# move only if the appropriate delay has passed:
if time.ticks_diff(now, self.last_step_time) >= self.step_delay:
# get the timeStamp of when you stepped:
self.last_step_time = now
# increment or decrement the step number,
# depending on direction:
if self.direction == 1:
self.step_number += 1
if self.step_number == self.number_of_steps:
self.step_number = 0
else:
if self.step_number == 0:
self.step_number = self.number_of_steps
self.step_number -= 1
# decrement the steps left:
steps_left -= 1
# step the motor to step number 0, 1, 2, 3
self._step_motor(self.step_number % 4)
if auto_stop:
self.stop()
return
def _step_motor(self, this_step):
''' Moves the motor forward or backwards.
if (this->pin_count == 4) {
'''
# 1010
if this_step == 0:
self.motor_pin_1.value(True)
self.motor_pin_2.value(False)
self.motor_pin_3.value(True)
self.motor_pin_4.value(False)
# 0110
elif this_step == 1:
self.motor_pin_1.value(False)
self.motor_pin_2.value(True)
self.motor_pin_3.value(True)
self.motor_pin_4.value(False)
# 0101
elif this_step == 2:
self.motor_pin_1.value(False)
self.motor_pin_2.value(True)
self.motor_pin_3.value(False)
self.motor_pin_4.value(True)
# 1001
elif this_step == 3:
self.motor_pin_1.value(True)
self.motor_pin_2.value(False)
self.motor_pin_3.value(False)
self.motor_pin_4.value(True)
return
def stop(self):
self.motor_pin_1.value(False)
self.motor_pin_2.value(False)
self.motor_pin_3.value(False)
self.motor_pin_4.value(False)
return
使い方
使用するための準備
>> from stepper import Stepper
>> MOTOR_STEPS = (2048)
>> PIN_MOTOR_1 = (25)
>> PIN_MOTOR_2 = (26)
>> PIN_MOTOR_3 = (27)
>> PIN_MOTOR_4 = (13)
>> my_motor = Stepper(MOTOR_STEPS, PIN_MOTOR_1,
PIN_MOTOR_3, PIN_MOTOR_2, PIN_MOTOR_4)
>> my_motor.set_speed(10)
回転させる
my_moter.step(512)
# =>ステッピングモータが90度、時計回りに回転
my_moter.step(2048)
# =>ステッピングモータが360度、時計回りに回転
my_moter.step(-512)
# =>ステッピングモータが90度、反時計回りに回転
- MOTOR_STEPSを2048としているため、一回転あたり2048となる
- step()にマイナス方向を指定すると反時計回りになる
- set_speed()には、1-20あたりまでが有効
さいごに
- 現状、回転を実行すると、止めることができません