はじめに
Jetson Xavier NX の発売と合わせて JetPack4.4 DP (Developer Preview) がリリースされたので、Nano と Xavier NX で Linux カーネルとモジュールをビルドしてみた。
通常のビルド手順と大きく変わりありませんが、今回は JetsonHacks の buildKernelAndModules ツールを使ってみました。
注意点
Nano と Xavier NX とでソースコードのダウンロードリンクが異なるので注意が必要です。
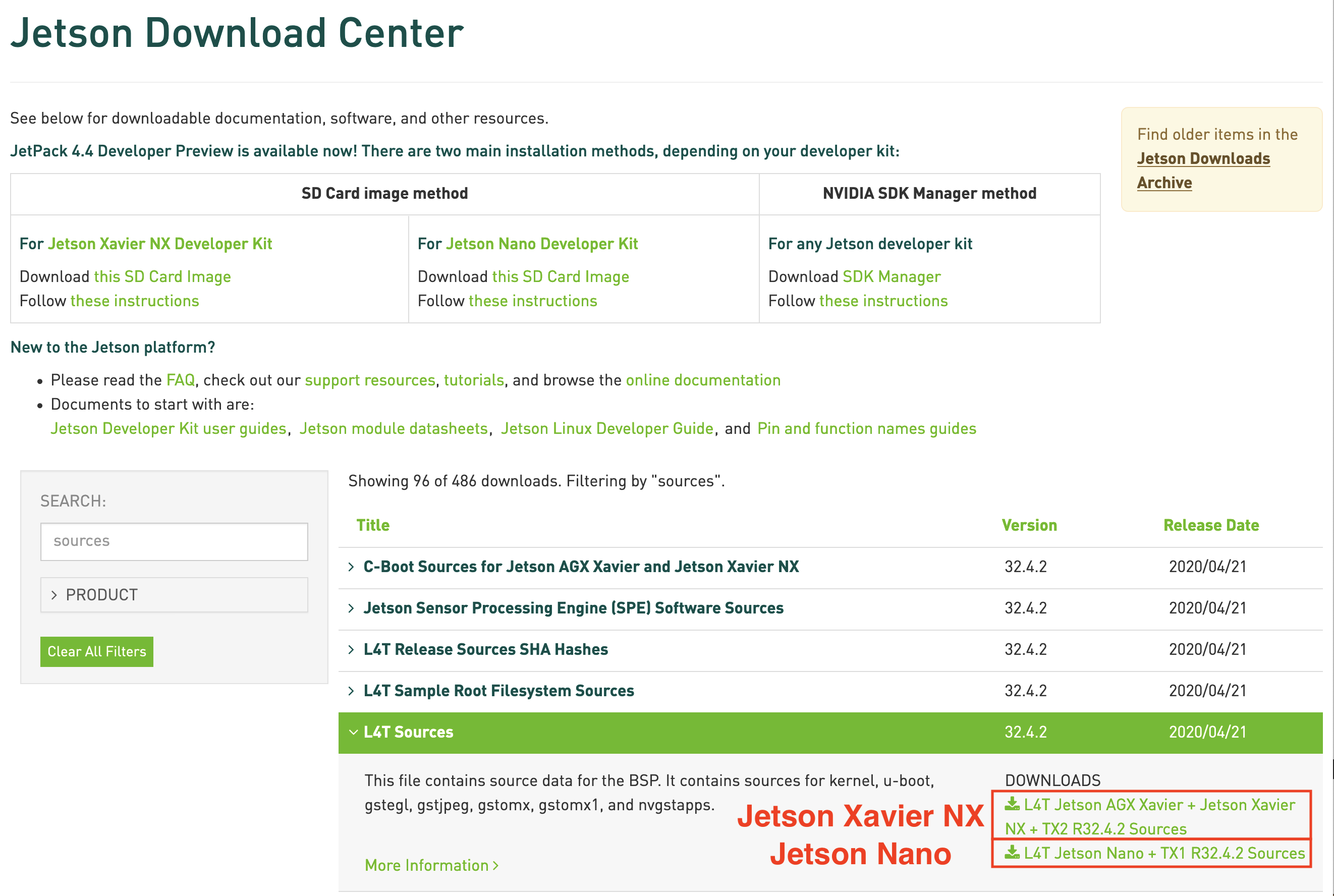
Xavier NX
Nano
ツールの変更点
まず、ツールをダウンロードします。
$ git clone https://github.com/JetsonHacksNano/buildKernelAndModules
$ cd buildKernelAndModules
ツールは JetPack 4.3 (r32.3.1) 用に作成されているので、ターゲットバージョンを JetPack 4.4 (r32.4.2) に変更します。
L4T_TARGET="32.3.1"
↓
L4T_TARGET="32.4.2"
Xavier NX の場合は上記に加えてモデル名を変更します。
JETSON_MODEL="NVIDIA Jetson Nano Developer Kit"
↓
JETSON_MODEL="NVIDIA Jetson Xavier NX Developer Kit"
カーネルソースコードのダウンロードリンクを変更します。Nano と Xavier NX とでリンク先が異なるので注意が必要です。
wget -N https://developer.nvidia.com/embedded/dlc/r32-3-1_Release_v1.0/Sources/T210/public_sources.tbz2
↓
# Xavier NX の場合
wget -N https://developer.nvidia.com/embedded/L4T/r32_Release_v4.2/Sources/T186/public_sources.tbz2
# Nano の場合
wget -N https://developer.nvidia.com/embedded/L4T/r32_Release_v4.2/Sources/T210/public_sources.tbz2
ビルド手順
1. カーネルソースをダウンロードするスクリプトを実行する
$ ./getKernelSources.sh
2. コンフィグを修正する
例として、書籍「Jetson Nano 超入門」の Part 6-2 に沿って MIDI 関連のコンフィグを追加します。
$ sudo vi /usr/src/kernel/kernel-4.9/.config
CONFIG_SOUND_OSS_CORE=y
CONFIG_SOUND_OSS_CORE_PRECLAIM=y
CONFIG_SND_SEQUENCER=y
CONFIG_SND_SEQ_DUMMY=y
CONFIG_SND_OSSEMUL=y
CONFIG_SND_MIXER_OSS=y
CONFIG_SND_PCM_OSS=y
CONFIG_SND_PCM_OSS_PLUGINS=y
CONFIG_SND_RAWMIDI_SEQ=y
直接 .config ファイルを編集する他に editConfig.sh を実行して menuConfig 形式で修正することも可能です。
$ ./editConfig.sh
3. カーネルをビルドする
$ ./makeKernel.sh
途中で質問された場合は y で答えます。
OSS Sequencer API (SND_SEQUENCER_OSS) [N/y/?] (NEW) y
Virtual MIDI soundcard (SND_VIRMIDI) [N/m/y/?] (NEW) y
Image makeにかかった時間は以下のとおりでした。
# Xavier NX
real 111m40.689s
user 44m39.048s
sys 3m40.908s
# Nano
real 31m41.584s
user 76m6.292s
sys 7m25.456s
4. モジュールをビルドする
$ ./makeModules.sh
Modules make にかかった時間は以下のとおりでした。
# Xavier NX
real 207m34.403s
user 108m12.652s
sys 9m6.864s
# Nano
real 35m29.093s
user 87m13.700s
sys 9m5.276s
5. Image のバックアップを取得する (オプション: 必須ではありません)
現在の Image をバックアップします。
$ sudo cp /boot/Image /boot/Image.backup
6. Image をコピーする
ビルドした新しい Image を現在の Image にコピーします。
$ ./copyImage.sh
7. /boot/extlinux/extlinux.conf を修正 (オプション: 必須ではありません)
起動時の backup kernel として /boot/Image.backup を指定することが可能です。
$ sudo vi /boot/extlinux/extlinux.conf
コメントを有効にします。
# LABEL backup
# MENU LABEL backup kernel
# LINUX /boot/Image.backup
# INITRD /boot/initrd
# APPEND ${cbootargs}
↓
LABEL backup
MENU LABEL backup kernel
LINUX /boot/Image.backup
INITRD /boot/initrd
APPEND ${cbootargs}
8. 再起動
$ sudo reboot
動作確認
カーネルのビルドされた時刻を確認することができます。
$ uname -a
Linux jetson-desktop 4.9.140-tegra #1 SMP PREEMPT Sun May 31 13:27:02 JST 2020 aarch64 aarch64 aarch64 GNU/Linux
また、書籍「Jetson Nano 超入門」の Part 6-3 に沿って MIDI が鳴れば正常です。
$ wget https://raw.githubusercontent.com/karaage0703/jetson-nano-tools/master/scripts/pocket_miku_test.py
$ python3 pocket_miku_test.py

(参考) MIDI が認識されていない場合に出力されるエラー
$ python3 pocket_miku_test.py
pygame 1.9.6
Hello from the pygame community. https://www.pygame.org/contribute.html
ALSA lib seq_hw.c:466:(snd_seq_hw_open) open /dev/snd/seq failed: No such file or directory
Traceback (most recent call last):
File "pocket_miku_test.py", line 49, in <module>
main()
File "pocket_miku_test.py", line 20, in main
midiOutput.set_instrument(instrument)
UnboundLocalError: local variable 'midiOutput' referenced before assignment