はじめに
この記事はmicro:bitで戦車を操縦するための開発手順を初級・中級・上級に分けて紹介しています.使用機材や開発ステップはまとめで紹介しています.
*まとめの記事を読んではじめられた方は,戦車の車体を制作してから,この記事を読むと良いでしょう!
初級編
まずは,micro:bitでモーターの制御をしてみましょう.
モーターは電気を流すと回転し,流すのをやめると止まります.電気を流す方向を逆にすることで,回転方向を逆にすることが出来ます.
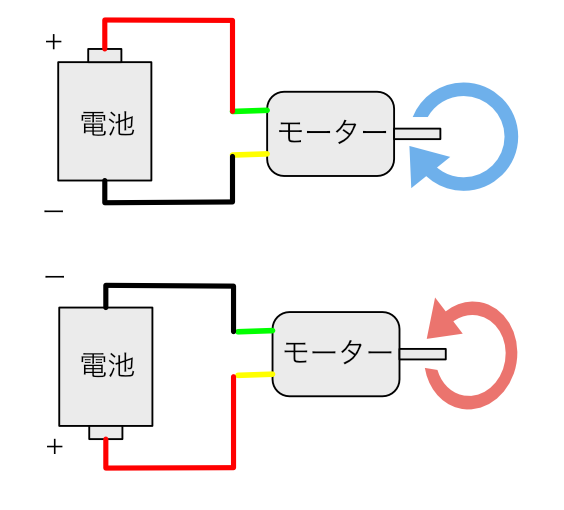
モータードライバーでは,この電気の流れを制御し,正転,反転,停止を可能にします.
まずはこのようなプログラムを作ってみましょう

micro:bitのAボタンを押すと前進し,Bボタンを押すと後退するはずです.(動かない場合は配線やモータ用の電源が入っているか確認しましょう!)
デジタル出力とは,micro:bitのエッジコネクターから電気を流すことをさし,値1で電気を流し,値0で電気を止めます.
Aボタンを押した時には,端子P8から電気が流れ,モータードライバーによって,モーターを伝い端子P1に電気が流れます.上の図のように電気の流れができることによりモーターは回転します.
端子に流す値を全て0にすることで,停止します.
チャレンジ
前進・後退が出来ましたら,次は左右の旋回をやってみましょう!
端子P1とP8で1つのモーターを制御し,端子P2とP12でもう1つのモーターを制御しています.
上のプログラムでは,P1=0,P8=1,P2=0,P12=1で前進しましたね.では,右旋回,左旋回の時にはどのようなプログラムにするとよいでしょうか?
また,これが出来たら,「最初だけ」のブロックの中で使っている「アナログで出力する」の数値を変更してみましょう.この数値を変更することで,モーターの回転スピードを変化させることが出来ます.