バイアスとバリアンス
前回は線形回帰について書いた。
ここでは、バイアスとバリアンスについて考える。
まず、学習の目的は、「観測不能な真の値と予測値との誤差を可能な限り小さくする」こと。観測不能な真の値を$y$、学習によって得られる解$\widehat{f}$とすると、
E_{ \widehat{f} } [(y-\widehat{f}(x)^{2}]
これを最小化することが学習の目的。
しかし、yを計算に組み込むことはできないので、下記のように変形する。
(E_{ \widehat{f} }[\widehat{f}(x)-f(x)])^{2}+ (E_{ \widehat{f} }[\widehat{f}(x)-E_{ \widehat{f}} [\widehat{f}(x)])^{2}]+ \sigma ^{2}
この変形式の導出は下記サイトが参考になる。
バイアス-バリアンス分解:機械学習の性能評価
第一項をバイアス、
第二項をバリアンス、
第三項をノイズ、
という。
バイアス
モデルと学習データの平均的なズレ。
(E_{ \widehat{f} }[\widehat{f}(x)-f(x)])^{2}
1.1.サンプルデータの作成
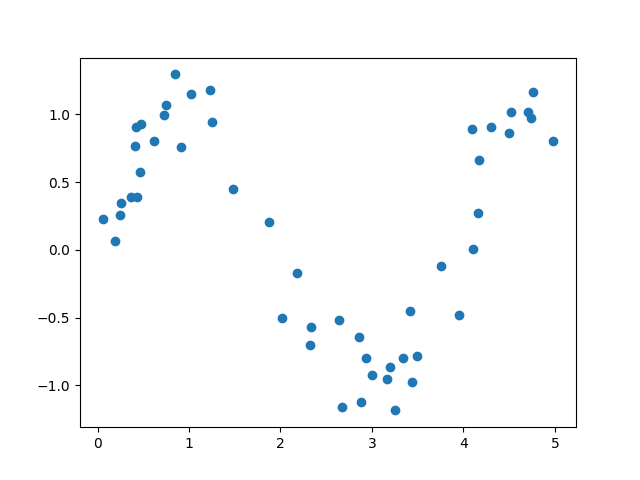
今回は、下記のような正弦関数にノイズを加えたデータを使用する。
import numpy as np
from sklearn.preprocessing import PolynomialFeatures
import math
np.random.seed(seed=32)
# create samples
sample_size = 50
noise_size = 0.2
dataX = np.linspace(0.0, 5.0, num=1000).reshape((1000, 1))
x = np.random.permutation(dataX)[:sample_size]
noise = noise_size * np.random.randn(sample_size, 1)
func = np.vectorize(math.sin)
y = func(x*1.6) + noise
1.2.モデルの作成
後で、モデル同士の精度を比べるため2つの多項式(3次元、9次元)を用意する。
dim = [3, 9]
for d in dim:
poly = PolynomialFeatures(degree=d)
X = poly.fit_transform(x)
XTX = np.dot(X.T, X)
XTX_inv = np.linalg.inv(XTX)
a = np.dot(XTX_inv, np.dot(X.T, y))
Xt = poly.fit_transform(dataX)
yt = np.dot(Xt, a)
plt.plot(dataX, yt, label='%d polynomial' % d)
今回も最小二乗法で最適なパラメータを求めた。
後、多項式モデルの生成はPolynomialFeaturesで作成した。
フィッテング結果は下図の通り。
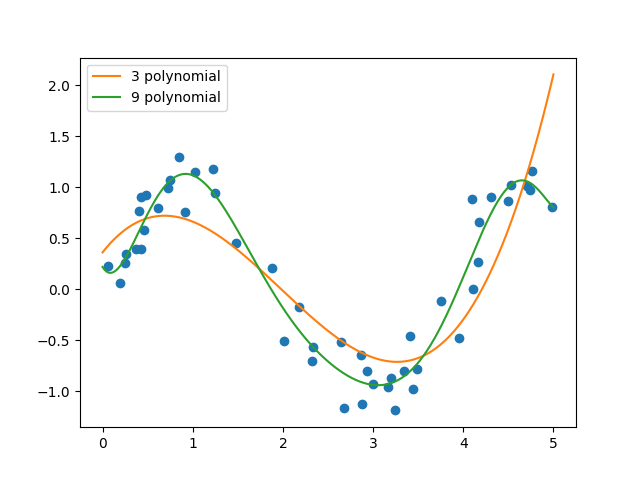
モデルを見る限り、9次元の多項式の方がよりフィットしているように見える。
1.3.誤差の計算
それぞれの平均二乗誤差を計算してみる。
for d in dim:
# ...
np.sum((y - np.dot(X, a)) ** 2)/sample_size
> polynomial3, 0.163705879935
> polynomial9, 0.0444546042927
9次元の多項式の方が誤差が小さいことが分かる。
この誤差のことを「バイアス」と言う。
バイアスは「関数(モデル)を複雑にするほど減少する」
バリアンス
バリアンスは、モデルの複雑さの度合い。
(モデルの分散と等価。)
(E_{ \widehat{f} }[\widehat{f}(x)]-E_{ \widehat{f}} [\widehat{f}(x)])^{2}]
2.1.バリアンスの計算
for d in dim:
# ...
np.var(np.dot(X, a))
> polynomial3, 0.437629402577
> polynomial9, 0.556897933262
3次元の方がバリアンスは小さい。
バリアンスは「関数(モデル)を複雑にするほど増加する」
→バイアスとバリアンスはトレードオフの関係
*ノイズは、削除不能な誤差