概要
Rvizで表示している点群を選択して,選択された点群の情報を簡単に取得するRvizプラグイン(selected_points_publisher)を見つけました.
しかしそのままだと動かなかったため,修正して使えるようにしてみました.
Github: kazuki21057/selected_points_publisher
本記事は修正したselected_points_publisherの導入方法と使い方を紹介します.(最後に修正内容も紹介します)
環境
- Ubuntu: 16.04
- ROS: kinetic
- rviz: 1.12.17
- Qt: 5.5.1
- OGRE: 1.9.0 (Ghadamon)
導入方法
インストール
$ cd ${your-catkin-workspace-root}/src
$ git clone https://github.com/kazuki21057/selected_points_publisher.git
$ catkin_make # or $ catkin build
ブランチ
SelectedPointsPublisherには3つのブランチがあります.それぞれのブランチで扱える点群情報の種類と数が変わります.
-
master: 位置情報のみ(x, y, z) [オススメ] -
withIntensity: 位置情報と反射強度 (x, y, z, intensity) -
withIntensityRing: 位置情報,反射強度,レーザID (x, y, z, intensity, ring)
お使いのLiDARの点群情報が一致している人はwithIntensity,withIntensityRingブランチをお使いください.
そうでない人,よくわからない人はとりあえずmasterブランチを使えば位置情報は取得できます.
(コードの修正が適当なためこのような形になってしまいました...)
Rvizに表示
プラグインツールとして新たに追加します.
-
Rvizを起動し,上部の"+"ボタンをクリック

-
選択項目の中から
SelectedPointsPublisherを選択
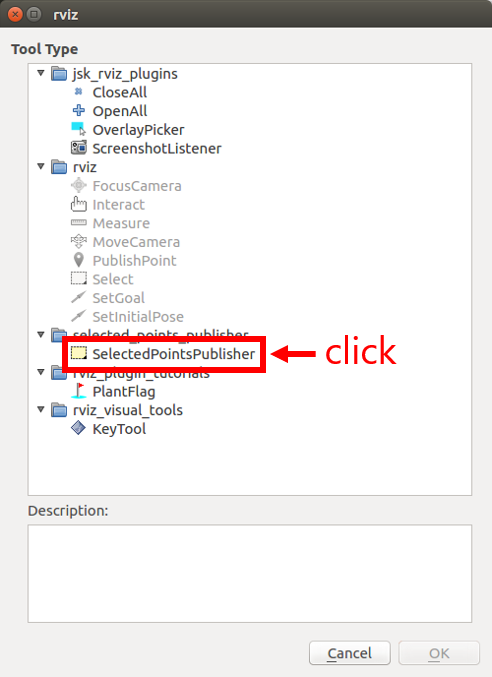
導入は以上です.簡単ですね.
使い方
使い方はSelectツールと同じです.
-
Rviz上部に追加された
SelectedPointsPublisherをクリック

-
情報が欲しい点群を長方形で選択
-
/rviz_selected_pointsをSubscribe.
使っている様子
選択した点群の反射強度の合計と平均値を取得するコードを作成し,実際に使ってみた様子がこちら.
サンプルコードはこちら.
/* ROS */
# include <ros/ros.h>
/* PointCloud */
# include <sensor_msgs/PointCloud2.h>
# include <velodyne_pointcloud/point_types.h>
/* PCL */
# include <pcl_ros/pcl_nodelet.h>
# include <pcl/point_cloud.h>
# include <pcl/point_types.h>
# include <pcl/common/impl/common.hpp>
# include <pcl_conversions/pcl_conversions.h>
# include <pcl_ros/transforms.h>
void pcCallback (const sensor_msgs::PointCloud2ConstPtr& msg)
{
pcl::PointCloud<velodyne_pointcloud::PointXYZIR> points_in, remain;
pcl::fromROSMsg(*msg, points_in);
remain.header = points_in.header;
remain.reserve(points_in.size());
float intensity = 0.0;
for (auto& point: points_in)
{
intensity += point.intensity;
}
std::printf("sum: %d\n", static_cast<int>(intensity));
std::printf("ave: %f\n", intensity/static_cast<float>(points_in.size()));
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "ave_intensity");
ros::NodeHandle nh;
ros::Subscriber subPoints = nh.subscribe("rviz_selected_points", 1, &pcCallback);
ros::spin();
return 0;
}
元パッケージのエラー原因
Rvizプラグイン初心者なりにデバッグしたのでその記録.
box_clipper3D.hpp の問題
エラー内容
usr/include/pcl-1.7/pcl/filters/impl/box_clipper3D.hpp:186:1: error: prototype for ‘void pcl::BoxClipper3D::clipPlanarPolygon3D(const std::vector<T, Eigen::aligned_allocator >&, std::vector<T, Eigen::aligned_allocator >&) const’ does not match any in class ‘pcl::BoxClipper3D’
issueでも質問されていますが,未だに回答はないようです.
src/SlectedPointsPublisher.cppの28行目の下記インクルードをコメントアウトすると解決しました.
# include <pcl/filters/impl/box_clipper3D.hpp>
Segmentation fault
pcl::BoxClipper3Dのエラーを解決するとコンパイルは通るのですが,いざ使ってみるとSegmentation faultが発生し情報を取得することができませんでした.
発生場所は209行目のmodel->rowCount()でした.(rowの値が取れないことが原因?)
こちらもissue1, issue2にて質問されています.
このうち,issue2にて質問者が修正コードを公開してくれていたので,ありがたく使わていただきました.
修正後の`SelectedPointsPublisher::_processSelectedAreaAndFindPoints()`の一部
rviz::SelectionManager* sel_manager = context_->getSelectionManager();
rviz::M_Picked selection = sel_manager->getSelection();
rviz::PropertyTreeModel *model = sel_manager->getPropertyModel();
// Generate a ros point cloud message with the selected points in rviz
sensor_msgs::PointCloud2 selected_points_ros;
selected_points_ros.header.frame_id = context_->getFixedFrame().toStdString();
selected_points_ros.height = 1;
selected_points_ros.point_step = 4 * 4;
selected_points_ros.is_dense = false;
selected_points_ros.is_bigendian = false;
selected_points_ros.fields.resize( 4 );
selected_points_ros.fields[0].name = "x";
selected_points_ros.fields[0].offset = 0;
selected_points_ros.fields[0].datatype = sensor_msgs::PointField::FLOAT32;
selected_points_ros.fields[0].count = 1;
selected_points_ros.fields[1].name = "y";
selected_points_ros.fields[1].offset = 4;
selected_points_ros.fields[1].datatype = sensor_msgs::PointField::FLOAT32;
selected_points_ros.fields[1].count = 1;
selected_points_ros.fields[2].name = "z";
selected_points_ros.fields[2].offset = 8;
selected_points_ros.fields[2].datatype = sensor_msgs::PointField::FLOAT32;
selected_points_ros.fields[2].count = 1;
selected_points_ros.fields[3].name = "intensity";
selected_points_ros.fields[3].offset = 12;
selected_points_ros.fields[3].datatype = sensor_msgs::PointField::FLOAT32;
selected_points_ros.fields[3].count = 1;
selected_points_ros.fields[3].name = "ring";
selected_points_ros.fields[3].offset = 16;
selected_points_ros.fields[3].datatype = sensor_msgs::PointField::FLOAT32;
selected_points_ros.fields[3].count = 1;
int i=0;
while (model->hasIndex(i, 0))
{
selected_points_ros.row_step = (i+1) * selected_points_ros.point_step;
selected_points_ros.data.resize( selected_points_ros.row_step );
QModelIndex child_index = model->index( i, 0 );
rviz::Property* child = model->getProp( child_index );
rviz::VectorProperty* subchild = (rviz::VectorProperty*) child->childAt( 0 );
Ogre::Vector3 vec = subchild->getVector();
uint8_t* ptr = &selected_points_ros.data[0] + i * selected_points_ros.point_step;
*(float*)ptr = vec.x;
ptr += 4;
*(float*)ptr = vec.y;
ptr += 4;
*(float*)ptr = vec.z;
ptr += 4;
/* get intensity */
rviz::Property* intensityChild = (rviz::Property*) child->childAt( 1 );
QVariant intensity = intensityChild->getValue();
*(float*)ptr = intensity.toFloat();
ptr += 4;
/* get ring */
rviz::Property* ringChild = (rviz::Property*) child->childAt( 2 );
QVariant ring = ringChild->getValue();
*(float*)ptr = ring.toFloat();
ptr += 4;
i++;
}
ROS_INFO_STREAM_NAMED( "SelectedPointsPublisher._processSelectedAreaAndFindPoints", "Number of points in the selected area: " << i);
selected_points_ros.width = i;
selected_points_ros.header.stamp = ros::Time::now();
rviz_selected_pub_.publish( selected_points_ros );
ちなみに,提示されていたコードも,intensityを取得する部分がうまく機能しなかったため,下記のように決め打ちでデータを取りに行くことでとりあえず解決しています.
/* get intensity */
rviz::Property* intensityChild = (rviz::Property*) child->childAt( 1 );
QVariant intensity = intensityChild->getValue();
*(float*)ptr = intensity.toFloat();
ptr += 4;
/* get ring */
rviz::Property* ringChild = (rviz::Property*) child->childAt( 2 );
QVariant ring = ringChild->getValue();
*(float*)ptr = ring.toFloat();
ptr += 4;
この部分がもう少しうまくかければ,いろいろな種類の点群情報を格納することができそうです.(誰か教えてください)
まとめ
特定エリアの3次元点群情報をピンポイントで取得するのは大変なので,個人的にはとても便利なプラグインだと思いました.