前回の記事 DlibとOpenCVを用いたVtuber撮影システムの開発 #1(開発環境構築)
1. Dlib_WebcamFaceTrackerの開発
さて、早速フェイストラッキング用プログラム、「Dlib_WebcamFaceTracker」を開発しましょう。
この開発では以下のものを使用します。
■開発ツール
・Visual Studio2015 Community
■学習済みモデル(顔認識AI)
・shape_predictor_68_face_landmarks.dat.bz2
⇒解凍して生成された「shape_predictor_68_face_landmarks.dat」を「sp.dat」にリネームしてください
■仕様
・Webカメラの画像から顔と顔の器官点を検出し、顔の角度をUDPで送信する。
なお、下のリンクから各種設定済みのVisualStudioプロジェクトをDLできます。
これを使用する場合は3.動作確認から手順を開始してください。
https://github.com/ProcamperKamekichi/Dlib_BasicSample
2 実装
2-1. VsualStudioプロジェクトの作成
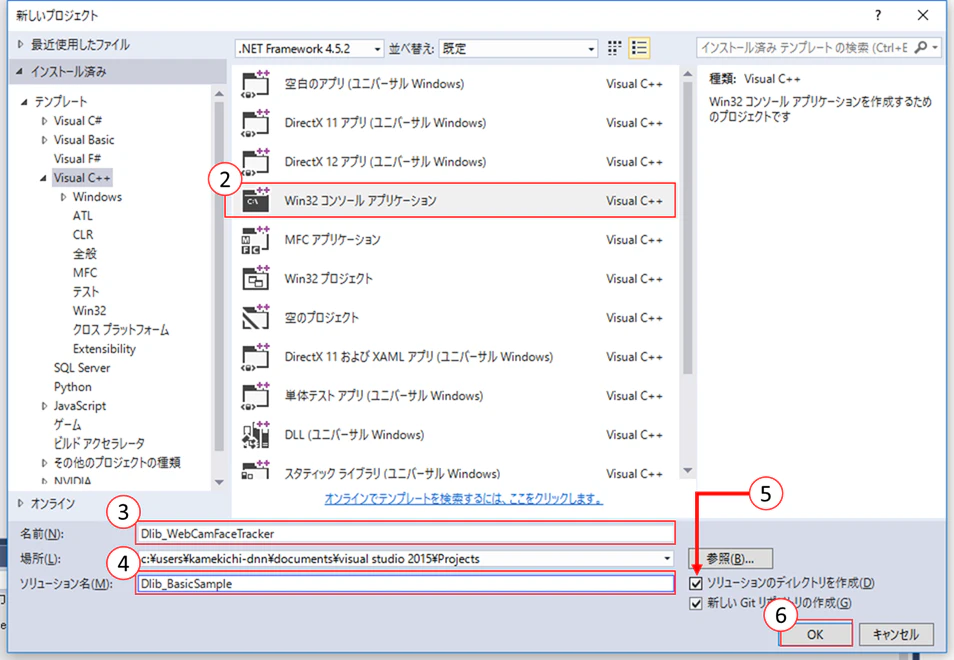
1.スタートメニューから新しいプロジェクト を選択
2.「新しいプロジェクト」ウィザードからテンプレート>Win32コンソールアプリケーション を選択
3.名前を「Dlib_WebcamFaceTracker」と入力
4.ソリューション名を「Dlib_BasicSample」と入力
5.「ソリューションのディレクトリを作成」チェックを"ON"にする
6.「OK」をクリック
以下の図を参考にしてください
7.「Win32アプリケーション ウィザード」を以下のように設定して「完了」をクリック

2-2. サンプルコード作成
それでは、サンプルコードを作成しましょう。
以下のコードをそのまま「Dlib_WebcamFaceTracker.cpp」にコピペしてください
# include <iostream>
# include <opencv2/highgui/highgui.hpp>
# include <opencv2/calib3d/calib3d.hpp>
# include <opencv2/imgproc/imgproc.hpp>
# include <dlib/opencv.h>
# include <dlib/image_processing/frontal_face_detector.h>
# include <dlib/image_processing/render_face_detections.h>
# include <dlib/image_processing.h>
# include "picojson.h"
# include <windows.h>
//フィルタ用の係数
# define LPF_VALUE_PRE 0.4
# define LPF_VALUE_CUR (1 - LPF_VALUE_PRE)
# define FACIAL_POINTS 68
//カメラのパラメータ(固定値)
double K[9] = { 6.5308391993466671e+002, 0.0, 3.1950000000000000e+002, 0.0, 6.5308391993466671e+002, 2.3950000000000000e+002, 0.0, 0.0, 1.0 };
double D[5] = { 7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000 };
class face
{
public:
float horizontal_pos;
float vertical_pos;
float yaw;
float pitch;
float roll;
float eye_L_X;
float eye_L_Y;
};
using namespace std;
/* ローカル関数 */
static void DrawFaceBox(cv::Mat frame, std::vector<cv::Point2d> reprojectdst);
static void SetInitialPoints(std::vector<cv::Point3d> * in_BoxPoints, std::vector<cv::Point3d> * in_FaceLandmarkPoints);
int main(int argc, char** argv)
{
/************ カメラ番号取得 ************/
int cam_num;
face actor;
//cout << "input camera num --> "; cin >> cam_num;
//getchar();
//カメラオープン
cv::VideoCapture cap(0);
if (!cap.isOpened())
{
std::cout << "Unable to connect to camera" << std::endl;
return EXIT_FAILURE;
}
//------------------------------------//
/************ ソケット初期化 ************/
int sock;
WSAData wsaData;
struct sockaddr_in addr;
WSAStartup(MAKEWORD(2, 0), &wsaData);
sock = socket(AF_INET, SOCK_DGRAM, 0);
addr.sin_family = AF_INET;
addr.sin_port = htons(22222);
addr.sin_addr.s_addr = inet_addr("127.0.0.1");
sendto(sock, "HELLO", 5, 0, (struct sockaddr *)&addr, sizeof(addr));
//-------------------------------//
/************ 検出器の初期化************/
//顔検出器
//(DlibのAPIに実装されているものをそのまま使用する
dlib::frontal_face_detector detector = dlib::get_frontal_face_detector();
//顔器官点検出器
//外部ファイルから検出器を読み込み(EXEコール時の第1引数)
dlib::shape_predictor predictor;
dlib::deserialize("sp.dat") >> predictor;
//-------------------------------//
//カメラの組み込み関数と歪み係数を設定
cv::Mat cam_matrix = cv::Mat(3, 3, CV_64FC1, K);
cv::Mat dist_coeffs = cv::Mat(5, 1, CV_64FC1, D);
//顔器官の3D座標初期値
std::vector<cv::Point3d> object_pts;
//顔向きを示す矩形の3D座標初期値
std::vector<cv::Point3d> reprojectsrc;
//初期値を設定
SetInitialPoints(&reprojectsrc, &object_pts);
//result
cv::Mat rotation_vec; //回天ベクトル
cv::Mat rotation_mat; //回天行列
cv::Mat translation_vec; //変換ベクトル
cv::Mat pose_mat = cv::Mat(3, 4, CV_64FC1); //姿勢(3X4の配列)
cv::Mat euler_angle = cv::Mat(3, 1, CV_64FC1); //オイラー角(3X1の配列)
cv::Mat prev_euler_angle = cv::Mat(3, 1, CV_64FC1); //前フレームでのオイラー角(3X1の配列)
//2D座標格納データ
std::vector<cv::Point2d> reprojectdst;
reprojectdst.resize(8);
//顔認識には使用しない
//使用するAPIの引数を埋めるために使用する
cv::Mat out_intrinsics = cv::Mat(3, 3, CV_64FC1);
cv::Mat out_rotation = cv::Mat(3, 3, CV_64FC1);
cv::Mat out_translation = cv::Mat(3, 1, CV_64FC1);
//画面表示用テキスト
std::ostringstream outtext;
//メインループ
while (1)
{
//カメラから現在の画像フレームを取得
cv::Mat temp;
cap >> temp;
//DlibのAPIで使用するために変換
dlib::cv_image<dlib::bgr_pixel> cimg(temp);
//画像データを顔検出器にかける
std::vector<dlib::rectangle> faces = detector(cimg);
// 1個以上の顔を検出している場合
if (faces.size() > 0)
{
//そのフレームで検出された最初の顔を、顔器官点検出器にかける
dlib::full_object_detection shape = predictor(cimg, faces[0]);
//顔器官点検出器から、顔の領域を取得
auto rect = shape.get_rect();
//器官点を描画
for (unsigned int i = 0; i < FACIAL_POINTS; ++i)
{
cv::circle(
temp, //描画先の画像データ
cv::Point( //顔器官点の2D点オブジェクト
shape.part(i).x(),
shape.part(i).y()),
2, //点のサイズ
cv::Scalar(0, 0, 255), //点の色
-1);
}
//画面上の2D座標の一部を格納
//顔の姿勢検出のため、一部の顔器官点を別の場所に格納する
std::vector<cv::Point2d> image_pts;
image_pts.push_back(cv::Point2d(shape.part(17).x(), shape.part(17).y())); //#17 右眉右端
image_pts.push_back(cv::Point2d(shape.part(21).x(), shape.part(21).y())); //#21 右眉左端
image_pts.push_back(cv::Point2d(shape.part(22).x(), shape.part(22).y())); //#22 左眉右端
image_pts.push_back(cv::Point2d(shape.part(26).x(), shape.part(26).y())); //#26 左眉左端
image_pts.push_back(cv::Point2d(shape.part(36).x(), shape.part(36).y())); //#36 右目右端
image_pts.push_back(cv::Point2d(shape.part(39).x(), shape.part(39).y())); //#39 右目左端
image_pts.push_back(cv::Point2d(shape.part(42).x(), shape.part(42).y())); //#42 左目右端
image_pts.push_back(cv::Point2d(shape.part(45).x(), shape.part(45).y())); //#45 左目左端
image_pts.push_back(cv::Point2d(shape.part(31).x(), shape.part(31).y())); //#31 鼻右
image_pts.push_back(cv::Point2d(shape.part(35).x(), shape.part(35).y())); //#35 鼻左
image_pts.push_back(cv::Point2d(shape.part(48).x(), shape.part(48).y())); //#48 口右
image_pts.push_back(cv::Point2d(shape.part(54).x(), shape.part(54).y())); //#54 口左
image_pts.push_back(cv::Point2d(shape.part(57).x(), shape.part(57).y())); //#57 口中央下
image_pts.push_back(cv::Point2d(shape.part(8).x(), shape.part(8).y())); //#8 顎
//顔器官点の3D座標初期値、カメラ情報、検出した2D座標から
//顔器官点の3D座標現在値と姿勢情報を算出する
cv::solvePnP(object_pts, image_pts, cam_matrix, dist_coeffs, rotation_vec, translation_vec);
//顔向き矩形の3D座標初期値と直前に取得した姿勢情報から
//顔向き矩形の3D座標現在値を算出する
cv::projectPoints(reprojectsrc, rotation_vec, translation_vec, cam_matrix, dist_coeffs, reprojectdst);
//顔向き矩形を描画する
DrawFaceBox(temp, reprojectdst);
//顔向き矩形の対角線交点の座標を算出
cv::Point2d P1(reprojectdst[8].x, reprojectdst[8].y);
cv::Point2d P2(reprojectdst[9].x, reprojectdst[9].y);
cv::Point2d P3(reprojectdst[10].x, reprojectdst[10].y);
cv::Point2d P4(reprojectdst[11].x, reprojectdst[11].y);
double S1 = ((P4.x - P2.x) * (P1.y - P2.y) - (P4.y - P2.y) * (P1.x - P2.x)) / 2;
double S2 = ((P4.x - P2.x) * (P2.y - P3.y) - (P4.y - P2.y) * (P2.x - P3.x)) / 2;
long Center_X = P1.x + (P3.x - P1.x) * S1 / (S1 + S2);
long Center_Y = P1.y + (P3.y - P1.y) * S1 / (S1 + S2);
//顔の現在位置として使用する
cv::Point2d CenterPoint(Center_X, Center_Y);
actor.horizontal_pos = ((float)Center_X / 2) / 640;
actor.vertical_pos = ((float)Center_Y / 2) / 360;
//算出した現在の顔の姿勢情報を行列からオイラー角に変換する
//オイラー角→0度、30度、90度などの一般的な「角度」の表現方法
cv::Rodrigues(rotation_vec, rotation_mat);
cv::hconcat(rotation_mat, translation_vec, pose_mat);
cv::decomposeProjectionMatrix(pose_mat, out_intrinsics, out_rotation, out_translation, cv::noArray(), cv::noArray(), cv::noArray(), euler_angle);
//この手の顔認識は、光やカメラ、背景の状態などによって常にノイズが入っている
//(早い話が、顔が常にブルブル震えた状態になる)
//そこで、一定値以下の姿勢変化は無視し、かつ変化量がスムーズになるよう
//フィルタ処理をかけ、姿勢の変化を滑らかにする
//ついでに、左右35度以上には曲がらないように制限する。
for (int i = 0; i < 3; i++)
{
if (euler_angle.at<double>(i) > 35) euler_angle.at<double>(i) = 35;
if (euler_angle.at<double>(i) < -35) euler_angle.at<double>(i) = -35;
if ((std::abs(prev_euler_angle.at<double>(i) - euler_angle.at<double>(i)) > 1))
{
if (prev_euler_angle.at<double>(i) > euler_angle.at<double>(i))
{
euler_angle.at<double>(i) -= 0.005;
}
else
{
euler_angle.at<double>(i) += 0.005;
}
euler_angle.at<double>(i) = (LPF_VALUE_PRE * prev_euler_angle.at<double>(i))
+ (LPF_VALUE_CUR * euler_angle.at<double>(i));
}
else
{
euler_angle.at<double>(i) = prev_euler_angle.at<double>(i);
}
}
prev_euler_angle.at<double>(0) = euler_angle.at<double>(0);
prev_euler_angle.at<double>(1) = euler_angle.at<double>(1);
prev_euler_angle.at<double>(2) = euler_angle.at<double>(2);
//取得した顔の位置、姿勢を画面上に表示する
outtext << "X: " << std::setprecision(3) << euler_angle.at<double>(0);
cv::putText(temp, outtext.str(), cv::Point(50, 40), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 0));
outtext.str("");
outtext << "Y: " << std::setprecision(3) << euler_angle.at<double>(1);
cv::putText(temp, outtext.str(), cv::Point(50, 60), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 0));
outtext.str("");
outtext << "Z: " << std::setprecision(3) << euler_angle.at<double>(2);
cv::putText(temp, outtext.str(), cv::Point(50, 80), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 0));
outtext.str("");
outtext << "Pos_X: " << std::setprecision(3) << actor.horizontal_pos;
cv::putText(temp, outtext.str(), cv::Point(50, 100), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 0));
outtext.str("");
outtext << "Pos_Y: " << std::setprecision(3) << actor.vertical_pos;
cv::putText(temp, outtext.str(), cv::Point(50, 120), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 0));
outtext.str("");
actor.yaw = euler_angle.at<double>(1);
actor.pitch = euler_angle.at<double>(0);
actor.roll = euler_angle.at<double>(2);
//Unity側への送信用データを作成する
picojson::object obj;
//顔位置X座標
obj.emplace(std::make_pair("horizontal_pos", actor.horizontal_pos));
//顔位置Y座標
obj.emplace(std::make_pair("vertical_pos", actor.vertical_pos));
//顔姿勢 Y軸
obj.emplace(std::make_pair("yow", actor.yaw));
//顔姿勢 X軸
obj.emplace(std::make_pair("pitch", actor.pitch));
//顔姿勢 Z軸
obj.emplace(std::make_pair("roll", actor.roll));
//全部の顔器官点を格納
picojson::array mouse;
for (unsigned int i = 0; i < FACIAL_POINTS; ++i)
{
picojson::array coord;
coord.push_back(picojson::value((double)shape.part(i).x()));
coord.push_back(picojson::value((double)shape.part(i).y()));
mouse.push_back(picojson::value(coord));
}
obj.emplace(std::make_pair("obj", picojson::value(mouse)));
//文字列に変換
picojson::value val(obj);
//シリアライズ
std::string msg = val.serialize();
//送信
sendto(sock, msg.c_str(), msg.size(), 0, (struct sockaddr *)&addr, sizeof(addr));
//顔器官点をクリア
image_pts.clear();
//press esc to end
//escで終了
auto key = cvWaitKey(2);
if (key == '\x1b')
{
break;
}
}
Sleep(1 / 1000);
//カメラから取得した映像を出力
cv::imshow("demo", temp);
//なぜかこれやると映像出力が動く
cvWaitKey(1);
}
return 0;
}
void DrawFaceBox(cv::Mat frame, std::vector<cv::Point2d> reprojectdst)
{
cv::line(frame, reprojectdst[8], reprojectdst[9], cv::Scalar(0, 0, 255));
cv::line(frame, reprojectdst[9], reprojectdst[10], cv::Scalar(0, 0, 255));
cv::line(frame, reprojectdst[10], reprojectdst[11], cv::Scalar(0, 0, 255));
cv::line(frame, reprojectdst[11], reprojectdst[8], cv::Scalar(0, 0, 255));
cv::line(frame, reprojectdst[8], reprojectdst[10], cv::Scalar(0, 0, 255));
cv::line(frame, reprojectdst[9], reprojectdst[11], cv::Scalar(0, 0, 255));
}
void SetInitialPoints(std::vector<cv::Point3d> * in_BoxPoints, std::vector<cv::Point3d> * in_FaceLandmarkPoints)
{
std::vector<cv::Point3d> reprojectsrc = (std::vector<cv::Point3d>) *in_BoxPoints;
std::vector<cv::Point3d> object_pts = (std::vector<cv::Point3d>) *in_FaceLandmarkPoints;
reprojectsrc.push_back(cv::Point3d(10.0, 10.0, 10.0));
reprojectsrc.push_back(cv::Point3d(10.0, 10.0, -10.0));
reprojectsrc.push_back(cv::Point3d(10.0, -10.0, -10.0));
reprojectsrc.push_back(cv::Point3d(10.0, -10.0, 10.0));
reprojectsrc.push_back(cv::Point3d(-10.0, 10.0, 10.0));
reprojectsrc.push_back(cv::Point3d(-10.0, 10.0, -10.0));
reprojectsrc.push_back(cv::Point3d(-10.0, -10.0, -10.0));
reprojectsrc.push_back(cv::Point3d(-10.0, -10.0, 10.0));
reprojectsrc.push_back(cv::Point3d(-10.0, -10.0, 0));
reprojectsrc.push_back(cv::Point3d(10.0, -10.0, 0));
reprojectsrc.push_back(cv::Point3d(10.0, 10.0, 0));
reprojectsrc.push_back(cv::Point3d(-10.0, 10.0, 0));
//顔器官点の3D座標初期値, この点を基準に、顔の姿勢を算出する
//参照元 http://aifi.isr.uc.pt/Downloads/OpenGL/glAnthropometric3DModel.cpp
object_pts.push_back(cv::Point3d(6.825897, 6.760612, 4.402142)); //#33 右眉右端
object_pts.push_back(cv::Point3d(1.330353, 7.122144, 6.903745)); //#29 右眉左端
object_pts.push_back(cv::Point3d(-1.330353, 7.122144, 6.903745)); //#34 左眉右端
object_pts.push_back(cv::Point3d(-6.825897, 6.760612, 4.402142)); //#38 左眉左端
object_pts.push_back(cv::Point3d(5.311432, 5.485328, 3.987654)); //#13 右目右端
object_pts.push_back(cv::Point3d(1.789930, 5.393625, 4.413414)); //#17 右目左端
object_pts.push_back(cv::Point3d(-1.789930, 5.393625, 4.413414)); //#25 左目右端
object_pts.push_back(cv::Point3d(-5.311432, 5.485328, 3.987654)); //#21 左目左端
object_pts.push_back(cv::Point3d(2.005628, 1.409845, 6.165652)); //#55 鼻右
object_pts.push_back(cv::Point3d(-2.005628, 1.409845, 6.165652)); //#49 鼻左
object_pts.push_back(cv::Point3d(2.774015, -2.080775, 5.048531)); //#43 口右
object_pts.push_back(cv::Point3d(-2.774015, -2.080775, 5.048531)); //#39 口左
object_pts.push_back(cv::Point3d(0.000000, -3.116408, 6.097667)); //#45 口中央下
object_pts.push_back(cv::Point3d(0.000000, -7.415691, 4.070434)); //#6 顎
*in_BoxPoints = reprojectsrc;
*in_FaceLandmarkPoints = object_pts;
}
コピペした後、おそらくはエディタがこんな感じにコンパイルエラーだらけになっていると思います。以下の操作を行ってコンパイルエラーを解消しましょう。
2-3. PicoJsonのインストール
まずはPicoJsonをインストールします。
1.PicoJson開発者のGithub から
「Clone or Download」> DownloadZip を選択して、ファイル一式をダウンロードしてください。(下図参照)

2.ダウンロードしたファイルを任意のフォルダに解凍します。
3.解凍したフォルダにある「picojson.h」をVisualStudioのソリューションエクスプローラー>ヘッダーファイル
にドラッグアンドドロップしてください。
これで、PicoJsonの導入は完了です。
2-4. インクルードディレクトリの設定
インクルードディレクトリを設定します。
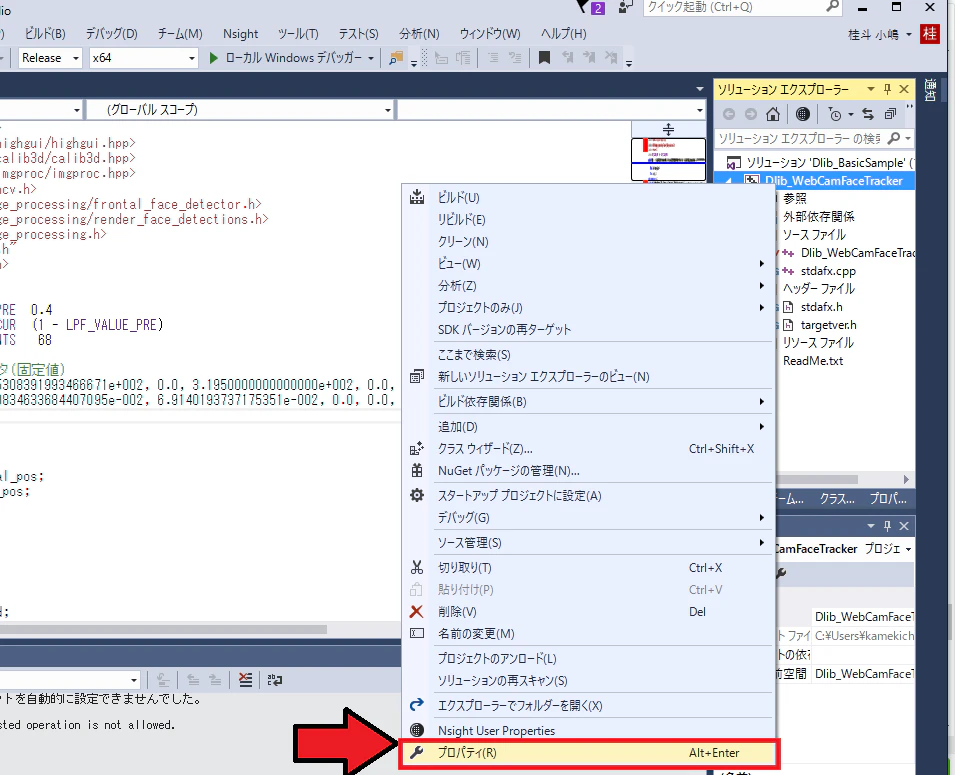
1.下の図を参考に、ソリューションエクスプローラー ⇒ Dlib_WebCamFaceTracker右クリック ⇒ プロパティをクリックして下さい。
「Dlib_WebCamFaceTrackerのプロパティページ」ウィンドウが開いたら、次の手順に進んでください。
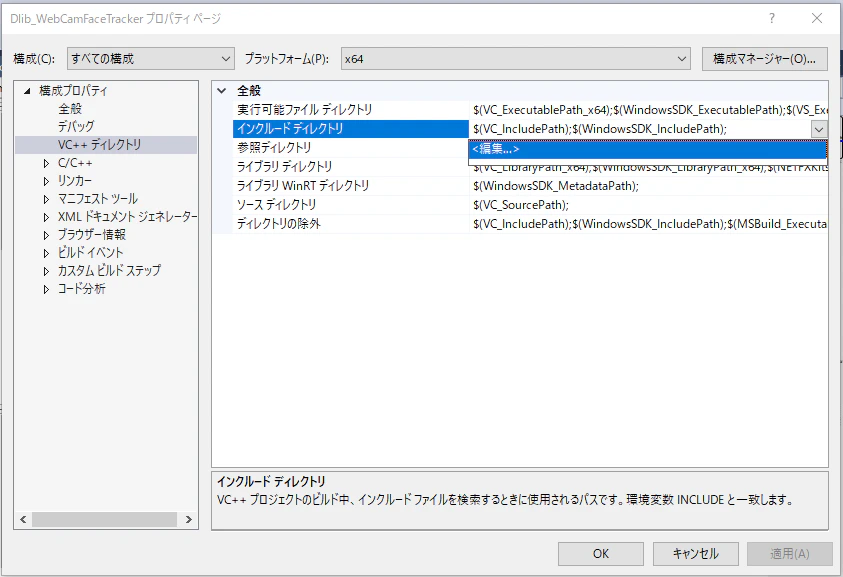
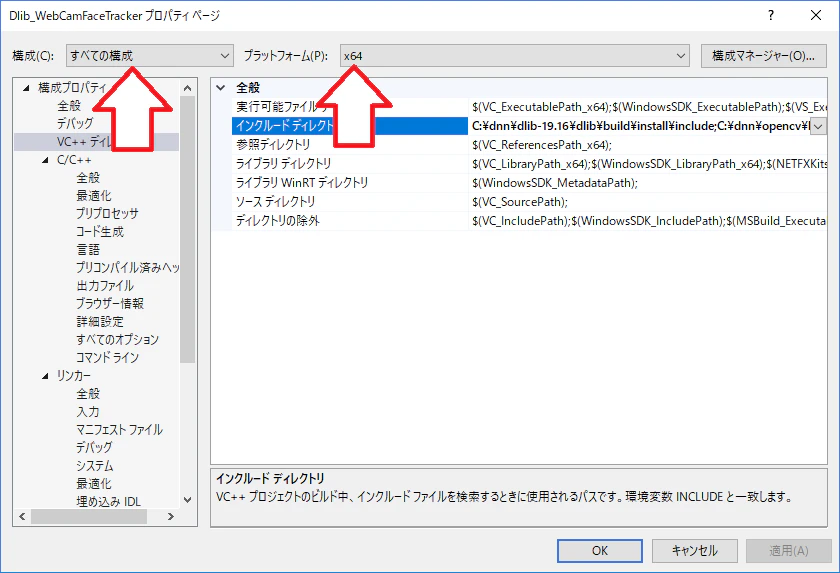
2.「Dlib_WebCamFaceTrackerのプロパティページ」にて、下の図を参考に
構成プロパティ ⇒ VC++ディレクトリ ⇒ インクルードディレクトリ ⇒ V ⇒ 〈編集...〉をクリックして下さい。
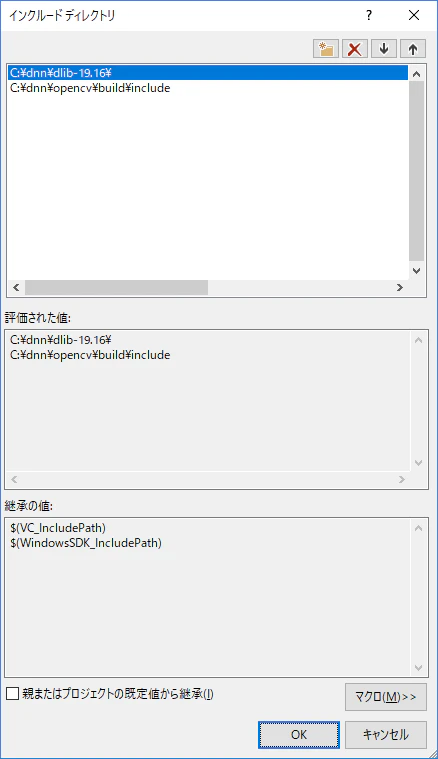
「インクルードディレクトリ」ウィンドウが出現したら、次の手順に進んでください。
3.「インクルードディレクトリ」ウィンドウ内にて、以下のパスを追加してください
C:\dnn\dlib-19.16
C:\dnn\opencv\build\include
2-5. ライブラリディレクトリの設定
上に続き、ライブラリディレクトリを設定します。
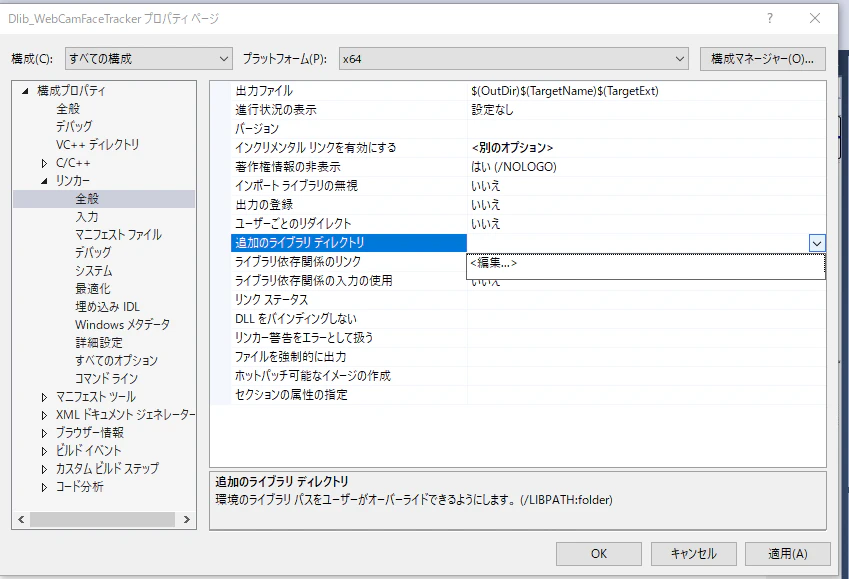
1.構成プロパティ ⇒ リンカー ⇒ 全般 の追加のライブラリディレクトリ ⇒ 〈編集...〉をクリックして下さい。
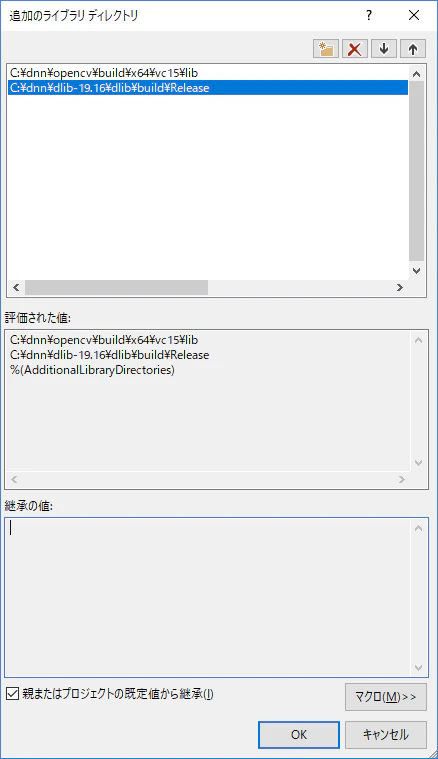
「追加のライブラリディレクトリ」ウィンドウが出現したら、次の手順に進んでください。
2.「追加のライブラリディレクトリ」ウィンドウにて、以下のパスを追加してください
C:\dnn\opencv\build\x64\vc15\lib
C:\dnn\dlib-19.16\dlib\build\Release
2-6. ライブラリファイルの設定
最後に、ライブラリファイルを設定します。
1.構成プロパティ ⇒ リンカー ⇒ 入力 ⇒ 追加の依存ファイル ⇒〈編集...〉をクリックして下さい。
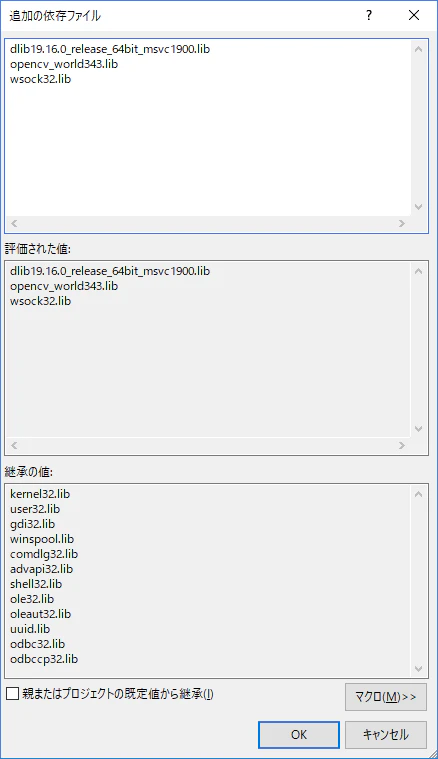
「追加の依存ファイル」ウィンドウが出現したら、次の手順に進んでください。
2.「追加の依存ファイル」ウィンドウにて、以下のファイル名を追加してください。
dlib19.16.0_release_64bit_msvc1900.lib
opencv_world343.lib
wsock32.lib
これで、すべてのコンパイルエラーが解消されたはずです。
もし解消されない場合、下のQA欄を参考に対応してみてください
3.動作確認
さて、ではビルドしてみましょう。下の図を参考に、プロジェクトをビルドしてください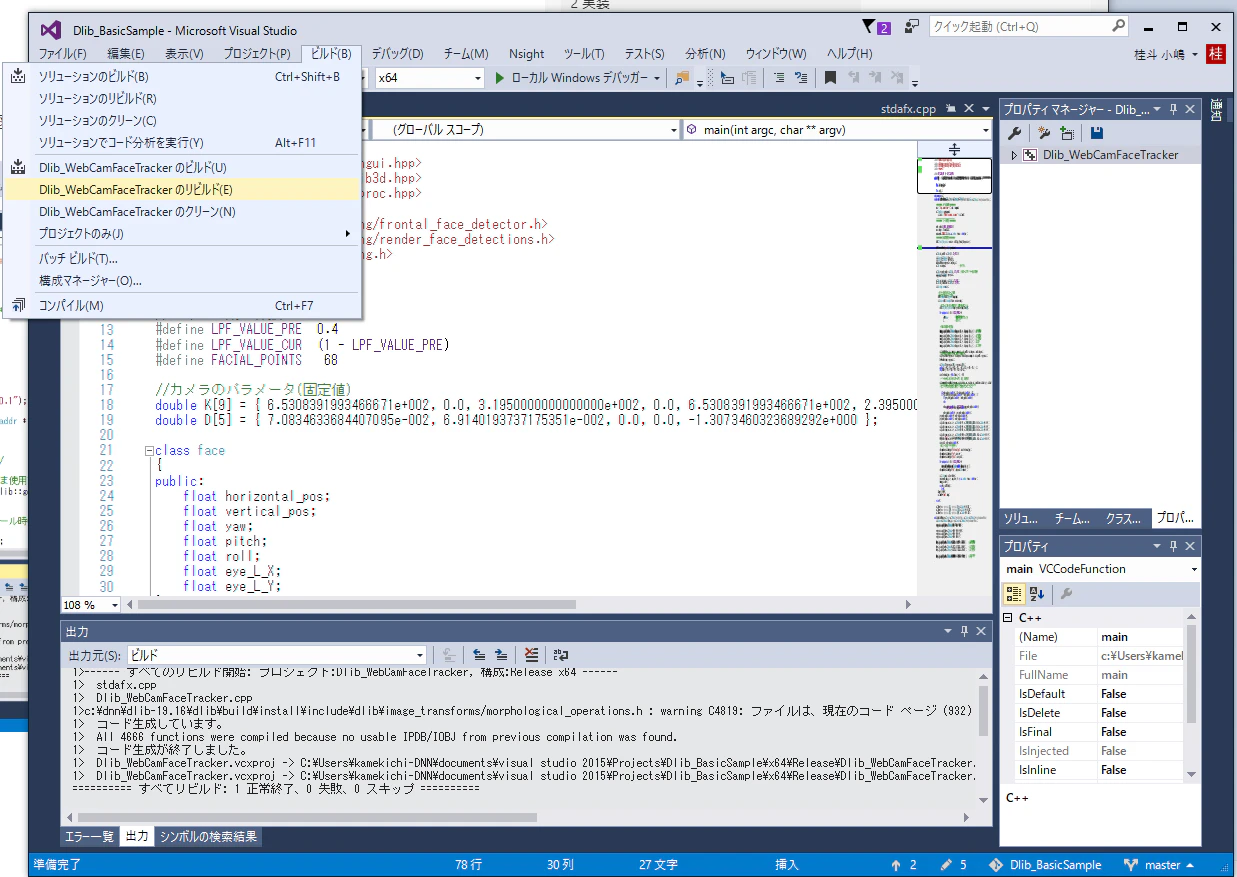
ビルドが成功したら、 Visual Studio 2015\Projects\Dlib_BasicSample\x64\Release のフォルダ内に以下のファイルをコピーしてください
opencv_world343.dll
sp.dat
これで、すべての準備が完了しました。
PCにWebカメラを接続し、Dlib_WebcamFaceTracker.exeをクリックして下さい
下のような画面が表示されれば成功です

4.プログラム解説
T.B.D
次の記事 にて、2.FaceController を開発します。
5.Q&A
Q1.コンパイルエラーが消えません
A1.構成プロパティ⇒C/C++⇒プリコンパイル済みヘッダーを開き、「プリコンパイル済みヘッダーを使用しない」が選択されているか確認してください
Q2.やっぱりコンパイルエラーが消えないんだけど?
A2.「Dlib_WebCamFaceTrackerのプロパティページ」上部、矢印の部分が「すべての構成」「X64」になっているか確認してください。
そうでない場合は、矢印部分を「すべての構成」「x64」に設定し、2-4. インクルードディレクトリの設定を実行してみてください。
Q3.コンパイルエラーは消えたけど、ビルド中にエラーが出ます。
A3.2-6ライブラリファイルの設定のファイル名が正しいかどうか確認してください。
dlib19.16.0_release_64bit_msvc1900.lib
opencv_world343.lib
これらのファイルは、Dlib,OpenCVのバージョンが異なる場合、変更されている可能性があります。
下記パスを確認し、ファイル名が正しいかどうか確認してみてください。
C:\dnn\opencv\build\x64\vc15\lib
C:\dnn\dlib-19.16\dlib\build\Release;
※前回の記事「DlibとOpenCVを用いたVtuber撮影システムの開発 #1(開発環境構築)」の表記とは異なるパスにDlib,OpenCVをインストールした場合は、そのパスを確認してください
参考文献
[Visual Studio 2017でDlibをビルドする -環境構築編-]
(https://blog.nextscape.net/archives/Date/2017/12/dlib-01)
[Visual Studio 2017でDlibをビルドする -サンプル実行編-]
(https://blog.nextscape.net/archives/Date/2017/12/dlib-02)
[顔向き推定について調査中]
(https://qiita.com/nonbiri15/items/f6910a993457a1862632)
[実質無料でバーチャルユーチューバーになる方法 こたつにっき]
(http://kotatu99.hateblo.jp/entry/2018/03/04/195505)
[C++からjsonを簡単に生成する方法(picojson)]
(http://blog.livedoor.jp/itahidamito/archives/51726902.html)