Autoware.AIでVelodyne VLP-16様な高価な3D Lidarが必須ですが、安価な2D Lidar( RPLIDAR A3)を使用できるかを試します。
目次
動作環境
- MacBookPro A1708 (Core i7, 16GB RAM, 512GB SSD)
- AsRock DeskMini GTX1060(Z370)
- Core i9-9900 (3.10GHz 8core 16thread)
- メモリー32GB
- NVIDIA GeForce GTX 1060 Mobile(6GB GDDR5)
- Ubuntu 18.04.5
- ROS Melodic
- Qt Creator 4.9.2
- Autoware 1.14.0
- RPLIDAR A3
2D Lidar( RPLIDAR A3)のデータをROSBAGに保存
- RPLIDAR ROS packageのインストール
cd ~/catkin_ws/src
git clone https://github.com/Slamtec/rplidar_ros.git
cd ~/catkin_ws
catkin_make
- RPLIDAR ROS packageのnode.cppを改造
RPLIDARのscanデータと共にscanデータをPointCloud2形式に変換して出力するように修正します。
PointCloud2 Topicのframe_idとtopic_nameをAutowareに合わせて修正します。
frame_id : velodyne
topic_name : points_raw
- RPLIDARのデータを記録
車の上に載せって走行したRPLIDARのScanデータをROSBAGに記録

$ rosbag record -a
$ rosbag info 2020-09-01-22-44-42.bag
path: 2020-09-01-22-44-42.bag
version: 2.0
duration: 1:14s (74s)
start: Sep 01 2020 22:44:42.32 (1598967882.32)
end: Sep 01 2020 22:45:56.63 (1598967956.63)
size: 240.8 MB
messages: 674885
compression: none [311/311 chunks]
types: rosgraph_msgs/Log [acffd30cd6b6de30f120938c17c593fb]
sensor_msgs/LaserScan [90c7ef2dc6895d81024acba2ac42f369]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
topics: /points_raw 984 msgs : sensor_msgs/PointCloud2
/rosout 336083 msgs : rosgraph_msgs/Log (3 connections)
/rosout_agg 336834 msgs : rosgraph_msgs/Log
/scan 984 msgs : sensor_msgs/LaserScan
ROSBAGのPointCloud2データから地図を作成
BLAMで地図を作成します。
- BLAMをインストール
Ubuntu18.04 でBLAMをインストールを参考してインストールします。
- 地図を作成
blam/internal/src/blam_example/launch/test_offline.launchでscan_topic名をROSBAGのtopic名に変更します。
velodyne_points → points_raw
$ cd blam
$ ./blam_offline.sh 2020-09-01-22-44-42.bag
NODES
/blam/
blam_slam (blam_slam/blam_slam_offline)
ROS_MASTER_URI=http://localhost:11311
process[blam/blam_slam-1]: started with pid [14250]
[ INFO] [1598973632.507347948]: /blam/blam_slam/BlamSlam: Registering log callbacks.
[ INFO] [1598973632.509999720]: STARTING LoadBagfile
[ INFO] [1598973632.510012012]: /blam/blam_slam/BlamSlamOffline: Processing the following topics:
/points_raw
[ INFO] [1598973632.622944827]: /blam/blam_slam/BlamSlamOffline: Bag start time = 1598967882.530024 Bag end time = 1598967956.633434
[ INFO] [1598973632.622991533]: /blam/blam_slam/BlamSlamOffline: Replay start time = 0.000000 Replay end time = 4294967296.000000
[ INFO] [1598973632.661777337]: STARTING ProcessBagfile
[ INFO] [1598973632.661799079]: /blam/blam_slam/BlamSlamOffline: Sorting messages.
[ INFO] [1598973632.666309510]: /blam/blam_slam/BlamSlamOffline: Processing messages.
[ INFO] [1598973632.666323489]: Processing 1 out of Total 984
[ INFO] [1598973633.955234963]: /blam/blam_slam/BlamSlamOffline: Finished processing bag file, 5747.575541 percent of real-time.
[ INFO] [1598973634.997859155]: PCD file prefix is: blam/pcd_offline/map_
[ INFO] [1598973634.998685363]: Saving as ASCII PCD
[ INFO] [1598973634.999621759]: Listening for incoming data on topic /blam/blam_slam/octree_map
[ INFO] [1598973636.508294270]: Received 1394 data points in frame world with the following fields: x y z
[ INFO] [1598973636.508377475]: Data saved to blam/pcd_offline/map_0.pcd
- 作成した地図を確認

Autoware.AIでROSBAGから経路生成
- Autoware.AIを起動
$ roslaunch runtime_manager runtime_manager.launch
- ROSBAGをロード
ROSBAGを選択してplay → Pause で一時停止

- Setup TabでTFとVehicle Modelを設定

- Map Tabでblamから生成した地図とTFを設定

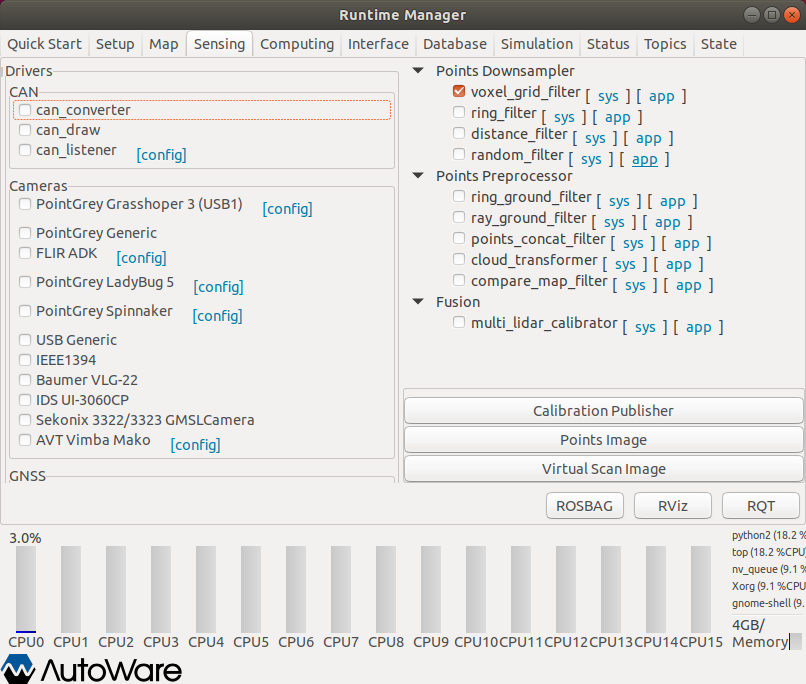
- Sensing Tabでvoxel_grid_filterを選択
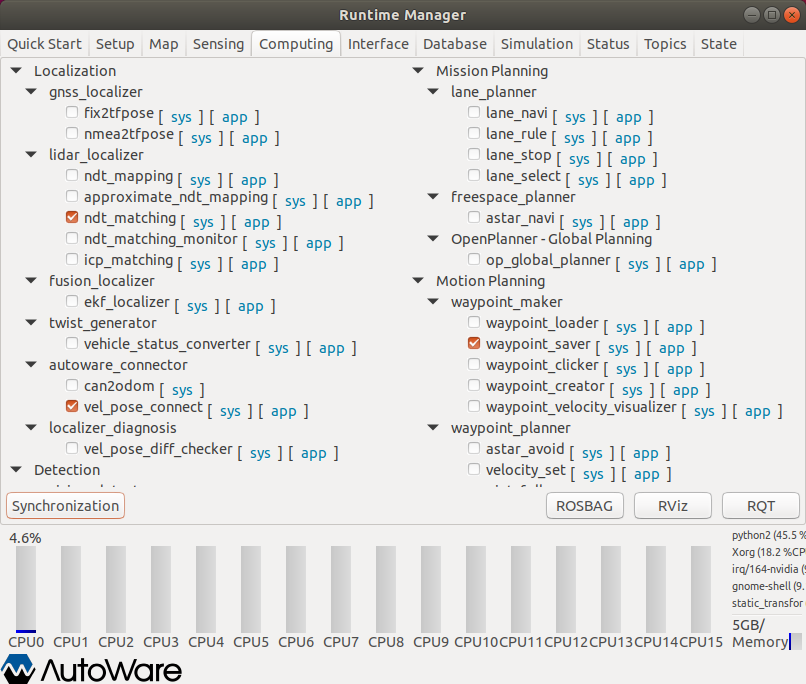
- Computing Tab
ndt_matchingのappでInitial Posを選択
ndt_matching、vel_pose_connect、waypoint_saverを選択

- Rosbag再生開始

- Rosbag再生完了、経路生成結果

