PWMを4本(GP2、GP3、GP4、GP5)立ち上げます。
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
// Output PWM signals on pins 2 and 3, 4
# include "pico/stdlib.h"
# include "hardware/pwm.h"
# include <stdio.h>
# include "hardware/clocks.h"
int main() {
stdio_init_all(); // need when UART
printf("\nstart GPIO 2,3,4,5\n");
gpio_set_function(2, GPIO_FUNC_PWM);
gpio_set_function(3, GPIO_FUNC_PWM);
gpio_set_function(4, GPIO_FUNC_PWM);
gpio_set_function(5, GPIO_FUNC_PWM);
// Find out which PWM slice is connected to GPIO 2 (it's slice 0)
uint8_t slice_num = pwm_gpio_to_slice_num(2);
uint8_t slice_num2 = pwm_gpio_to_slice_num(4);
uint16_t divCounter = 1250; // max 2^16 = 65536
pwm_set_wrap(slice_num, divCounter-1); //
pwm_set_wrap(slice_num2, divCounter-1); //
uint8_t div = 127;
uint8_t fract = 8;
//pwm_set_clkdiv_int_frac(slice_num, div, fract);
// duty 50%
pwm_set_chan_level(slice_num, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num, PWM_CHAN_B, (int)divCounter*0.5);
pwm_set_chan_level(slice_num2, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num2, PWM_CHAN_B, (int)divCounter*0.5);
// Set the PWM running
pwm_set_enabled(slice_num, true);
pwm_set_enabled(slice_num2, true);
}
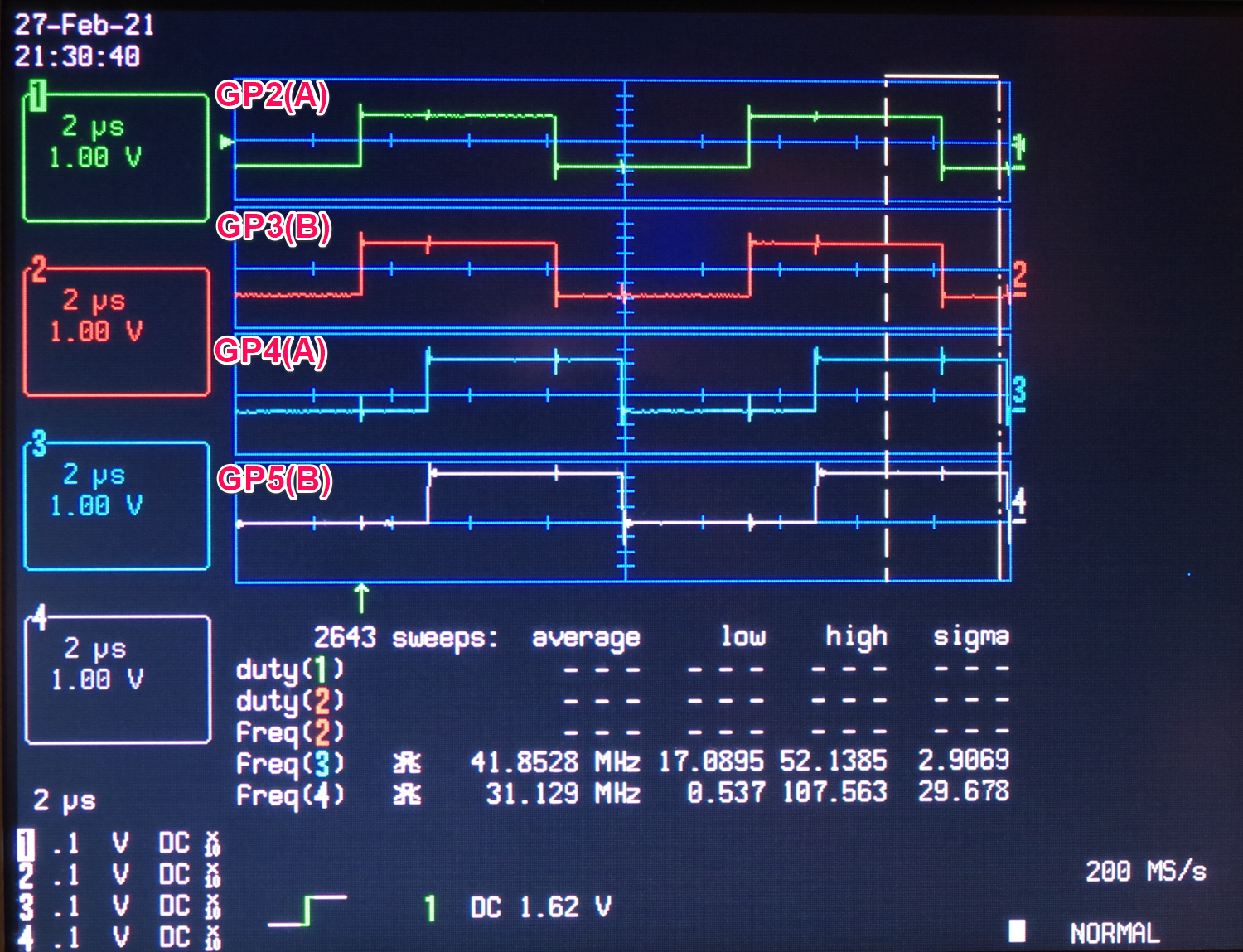
GP2とGP3がスライス0、GP4とGP5がスライス1です。GPIOは次のようにチャネルがマッピングされています。
| GPIO | 0 | 1 | 2 | 3 | 4 | 5 | ... | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|
| PWMチャネル | 0A | 0B | 1A | 1B | 2A | 2B | ... | 7A | 7B |
| GPIO | 16 | 17 | 18 | 19 | 20 | 21 | ... | - | - |
|---|---|---|---|---|---|---|---|---|---|
| PWMチャネル | 0A | 0B | 1A | 1B | 2A | 2B | ... | - | - |
スライスを独立して4本のPWMを作る
GP2、GP3、GP4、GP5の出力に対してひとつずつスライスを定義します。
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
// Output PWM signals on pins 2 and 3,4,5
# include "pico/stdlib.h"
# include "hardware/pwm.h"
# include <stdio.h>
# include "hardware/clocks.h"
int main() {
stdio_init_all(); // need when UART
printf("\nstart GPIO 2,3,4,5\n");
gpio_set_function(2, GPIO_FUNC_PWM);
gpio_set_function(3, GPIO_FUNC_PWM);
gpio_set_function(4, GPIO_FUNC_PWM);
gpio_set_function(5, GPIO_FUNC_PWM);
// Find out which PWM slice is connected to GPIO 2 (it's slice 0)
uint8_t slice_num = pwm_gpio_to_slice_num(2);
uint8_t slice_num2 = pwm_gpio_to_slice_num(3);
uint8_t slice_num3 = pwm_gpio_to_slice_num(4);
uint8_t slice_num4 = pwm_gpio_to_slice_num(5);
uint16_t divCounter = 1250; // max 2^16 = 65536
pwm_set_wrap(slice_num, divCounter-1); //
pwm_set_wrap(slice_num2, divCounter-1); //
pwm_set_wrap(slice_num3, divCounter-1); //
pwm_set_wrap(slice_num4, divCounter-1); //
uint8_t div = 127;
uint8_t fract = 8;
//pwm_set_clkdiv_int_frac(slice_num, div, fract);
// duty 50%
pwm_set_chan_level(slice_num, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num2, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num3, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num4, PWM_CHAN_A, (int)divCounter*0.5);
// Set the PWM running
pwm_set_enabled(slice_num, true);
pwm_set_enabled(slice_num2, true);
pwm_set_enabled(slice_num3, true);
pwm_set_enabled(slice_num4, true);
}
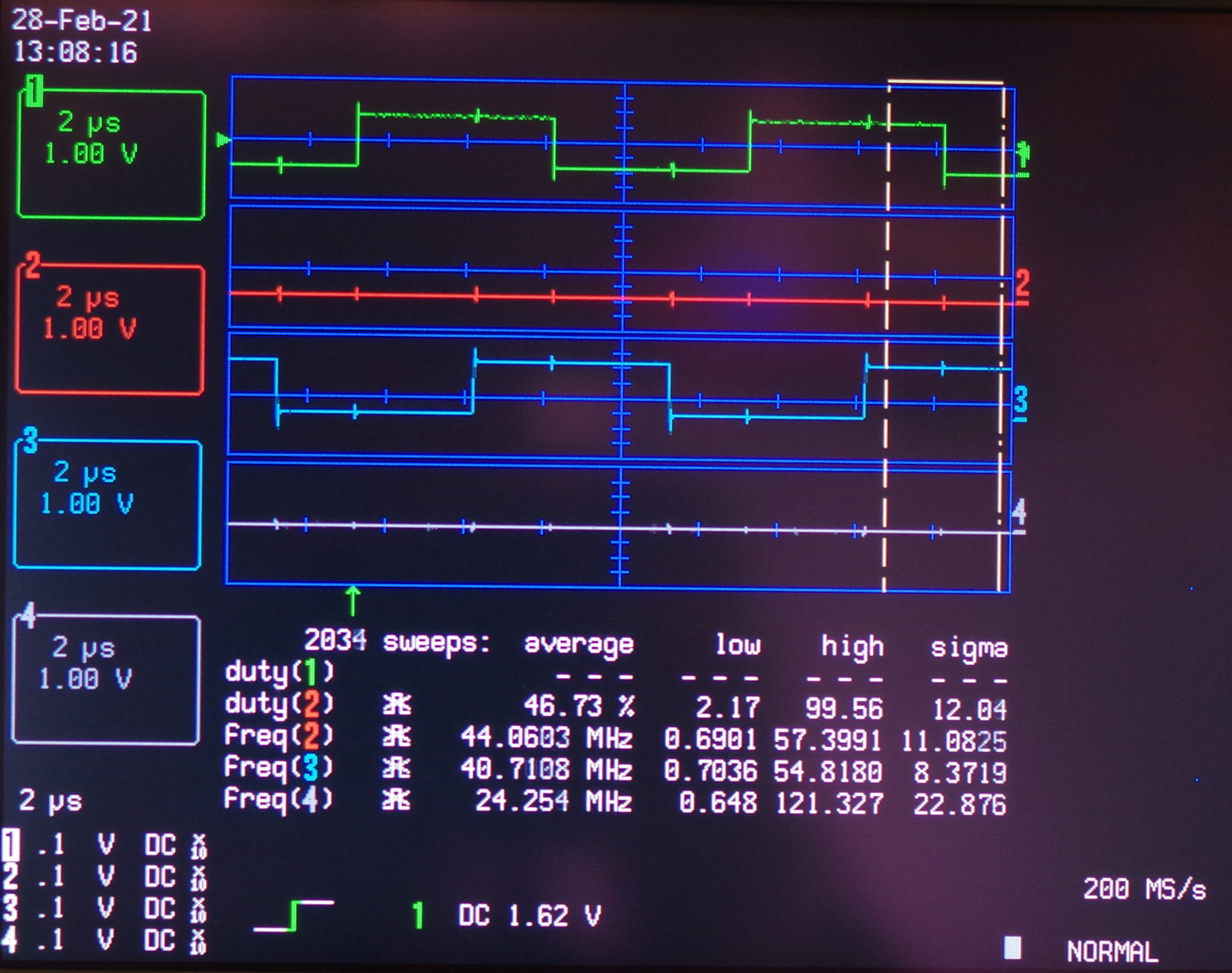
GP3とGP5の出力が出ていません。
飛び飛びのGPxを指定
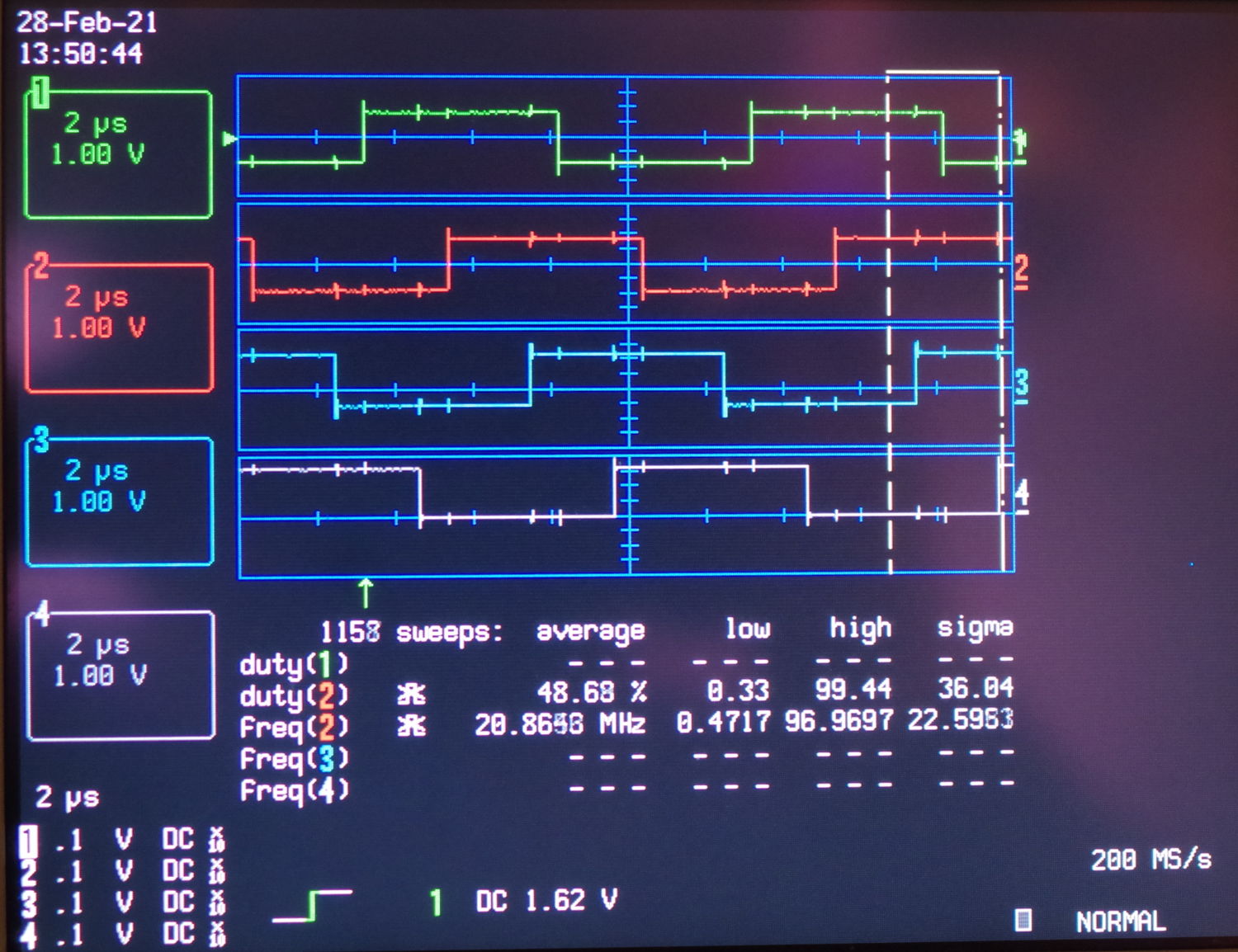
Aの出力だけを指定します。出力は、GP2、GP4、GP6、GP8です。
gpio_set_function(2, GPIO_FUNC_PWM);
gpio_set_function(4, GPIO_FUNC_PWM);
gpio_set_function(6, GPIO_FUNC_PWM);
gpio_set_function(8, GPIO_FUNC_PWM);
// Find out which PWM slice is connected to GPIO 2 (it's slice 0)
uint8_t slice_num = pwm_gpio_to_slice_num(2);
uint8_t slice_num2 = pwm_gpio_to_slice_num(4);
uint8_t slice_num3 = pwm_gpio_to_slice_num(6);
uint8_t slice_num4 = pwm_gpio_to_slice_num(8);
四つの独立したPWM信号がずれながら発生しています。
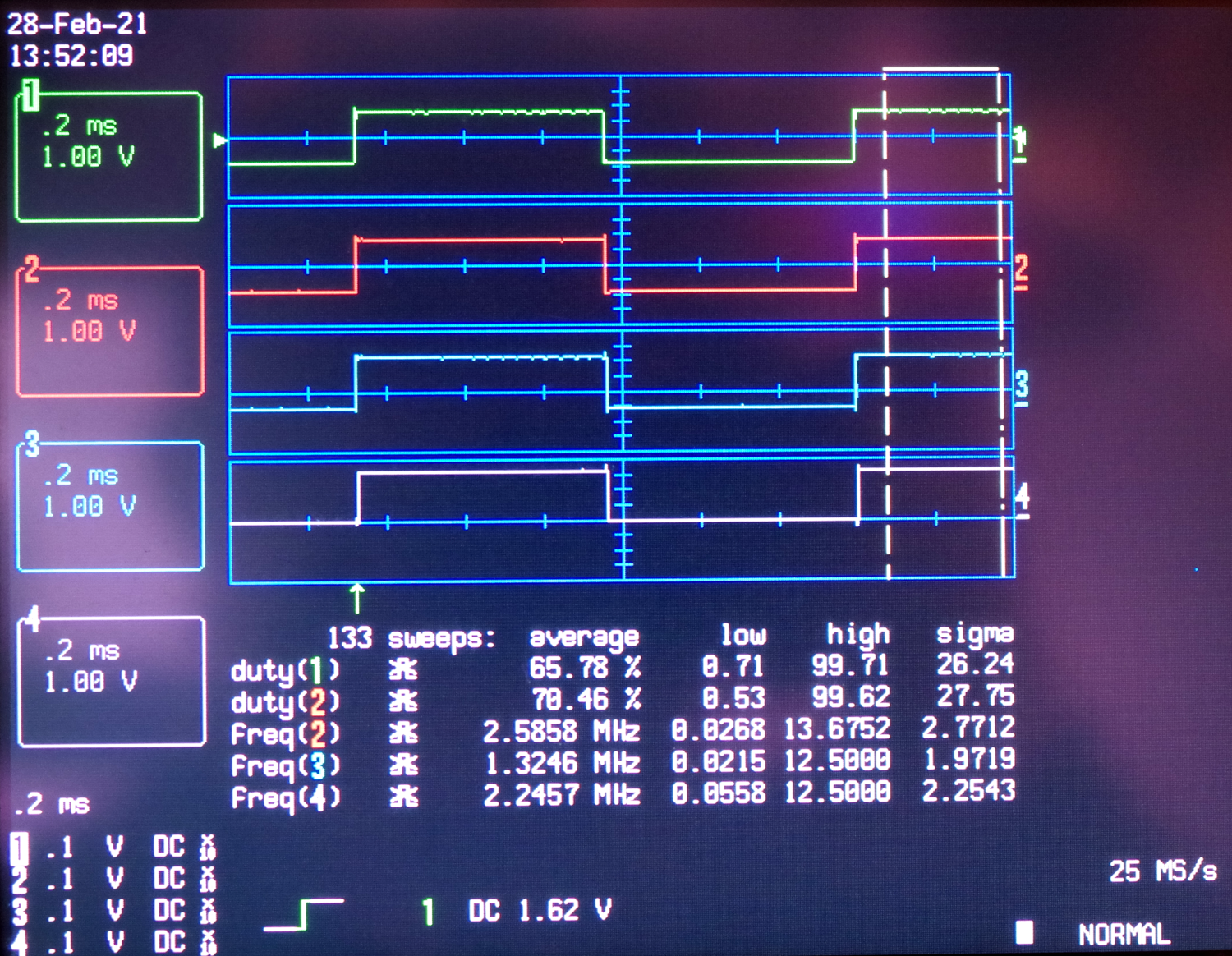
これを分周して1MHzから980.39Hzへ落とします(前回参照)。1usのずれは、目視では見えなくなってしまいました。
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
// Output PWM signals on pins 2 and 4, 6, 8
# include "pico/stdlib.h"
# include "hardware/pwm.h"
# include <stdio.h>
# include "hardware/clocks.h"
int main() {
stdio_init_all(); // need when UART
printf("\nstart GPIO 2,4,6,8\n");
gpio_set_function(2, GPIO_FUNC_PWM);
gpio_set_function(4, GPIO_FUNC_PWM);
gpio_set_function(6, GPIO_FUNC_PWM);
gpio_set_function(8, GPIO_FUNC_PWM);
// Find out which PWM slice is connected to GPIO 2 (it's slice 0)
uint8_t slice_num = pwm_gpio_to_slice_num(2);
uint8_t slice_num2 = pwm_gpio_to_slice_num(4);
uint8_t slice_num3 = pwm_gpio_to_slice_num(6);
uint8_t slice_num4 = pwm_gpio_to_slice_num(8);
uint16_t divCounter = 1250; // max 2^16 = 65536
pwm_set_wrap(slice_num, divCounter-1); //
pwm_set_wrap(slice_num2, divCounter-1); //
pwm_set_wrap(slice_num3, divCounter-1); //
pwm_set_wrap(slice_num4, divCounter-1); //
uint8_t div_int = 127;
uint8_t div_fract = 8;
pwm_set_clkdiv_int_frac(slice_num, div_int, div_fract);
pwm_set_clkdiv_int_frac(slice_num2, div_int, div_fract);
pwm_set_clkdiv_int_frac(slice_num3, div_int, div_fract);
pwm_set_clkdiv_int_frac(slice_num4, div_int, div_fract);
// duty 50%
pwm_set_chan_level(slice_num, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num2, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num3, PWM_CHAN_A, (int)divCounter*0.5);
pwm_set_chan_level(slice_num4, PWM_CHAN_A, (int)divCounter*0.5);
// Set the PWM running
pwm_set_enabled(slice_num, true);
pwm_set_enabled(slice_num2, true);
pwm_set_enabled(slice_num3, true);
pwm_set_enabled(slice_num4, true);
}