はじめに
こちらは フィジカルAIxロボティクス Advent Calendar 2025 の19日目の記事です。
私が現在所属しているnewmoの技術ブログにもフィジカルAIにまつわる以下記事を投稿していますので、ぜひご覧ください。
本記事は、フィジカルAIの入門として多く取り上げられるSO-ARM 101を活用したモバイルマニピュレータであるXLeRobotを私が作り上げるのに必要だった購入品の一覧とかかったお金をまとめたものとなります。
アメリカや中国での事例が多く、日本だからこそ困ることやはまりどころもあったので、そちらについても共有できればと思います。

XLeRobotとは
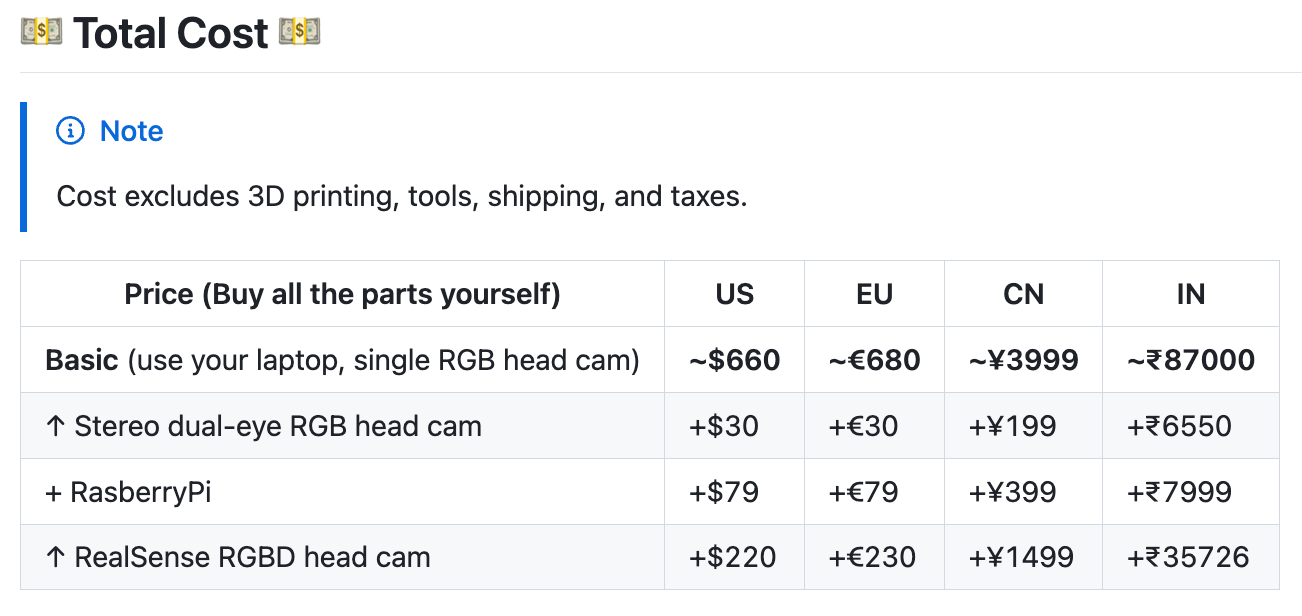
XLeRobotは、Vector Wang氏らがHugging Faceの「LeRobot」を基盤に開発した、オープンソースの双腕移動ロボットです。IKEAのワゴンやLekiwi、SO-101アームを組み合わせることで、制作費約660ドル(約10万円)という低価格を実現しました。
固定式のアーム単体とは異なり、物の運搬や移動を伴う複合タスクにも対応可能です。家事などのタスク学習において、その活用の幅は大きく広がり、よりヒューマノイドに近いと言えます。

必要な部品リスト
XLeRobotを作り上げるのに必要な部品は、GitHubリポジトリ に書いてあります。
以下は、リポジトリからの引用 (2025年12月中旬現在) です。
一つづつ見ていきましょう
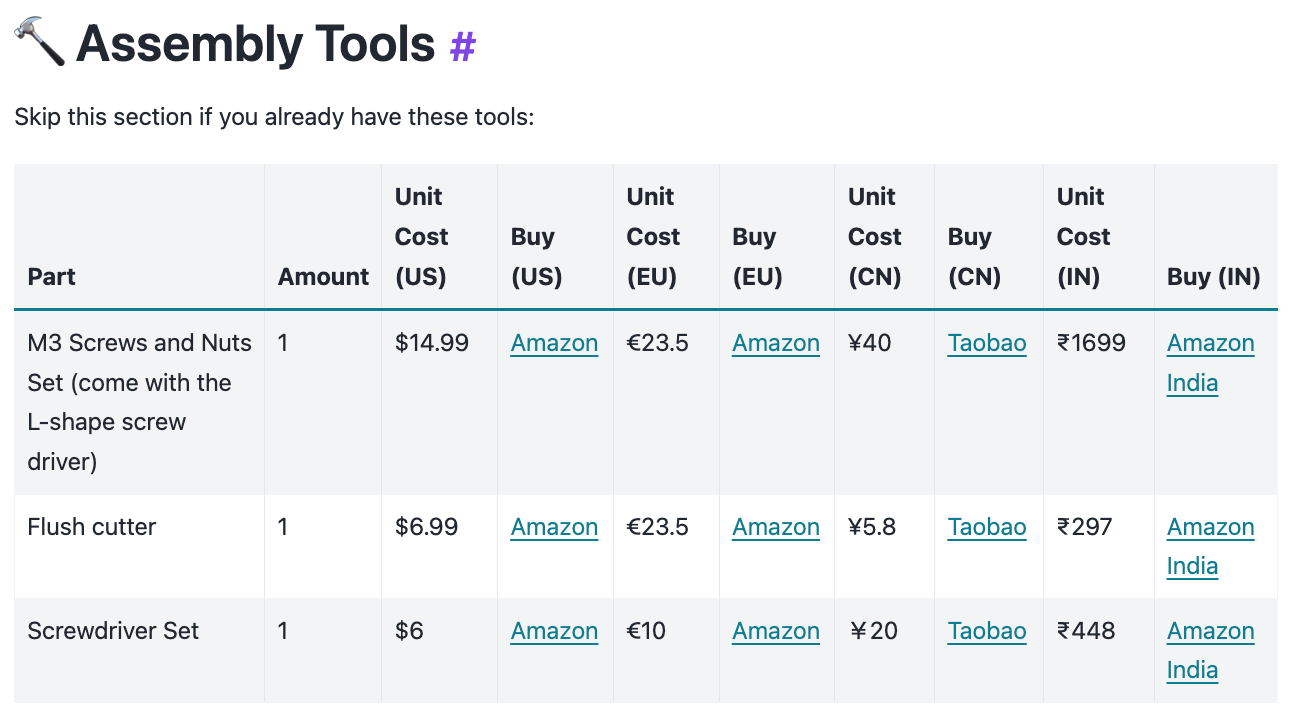
Assembly Tools
M3 Screws and Nuts Set (come with the L-shape screw driver)
M3ボルトとナットのセットです。
大量に使うので、さまざまな長さ & まとまった数があると非常に便利でした。
完全に同じ商品は、5652円でしたが、今回自分は下の1387円の商品を利用しました。
六角レンチについては、後述の電動ドライバーで問題ありません。


Flush cutter
いわゆるニッパーです。すでに持っていたものを利用したので、新規購入はなしです。
とはいえ、使った記憶がないので、持っていない方も買わなくて問題ありません。
3Dプリントしたパーツのバリ取りとかに利用することを想定されていると思います。
https://amzn.asia/d/cRHHnD6

Screwdriver Set
スクリュードライバーです。ニッパーと同じく、普段使いの物を利用したため、新規購入はありませんでした。

普段は、以前同僚に勧めてもらったこちらの電動ドライバーを利用しています。
USB-typeCで充電でき、かなりさまざまな形に対応していて、手元のライトも便利なので重宝しています。

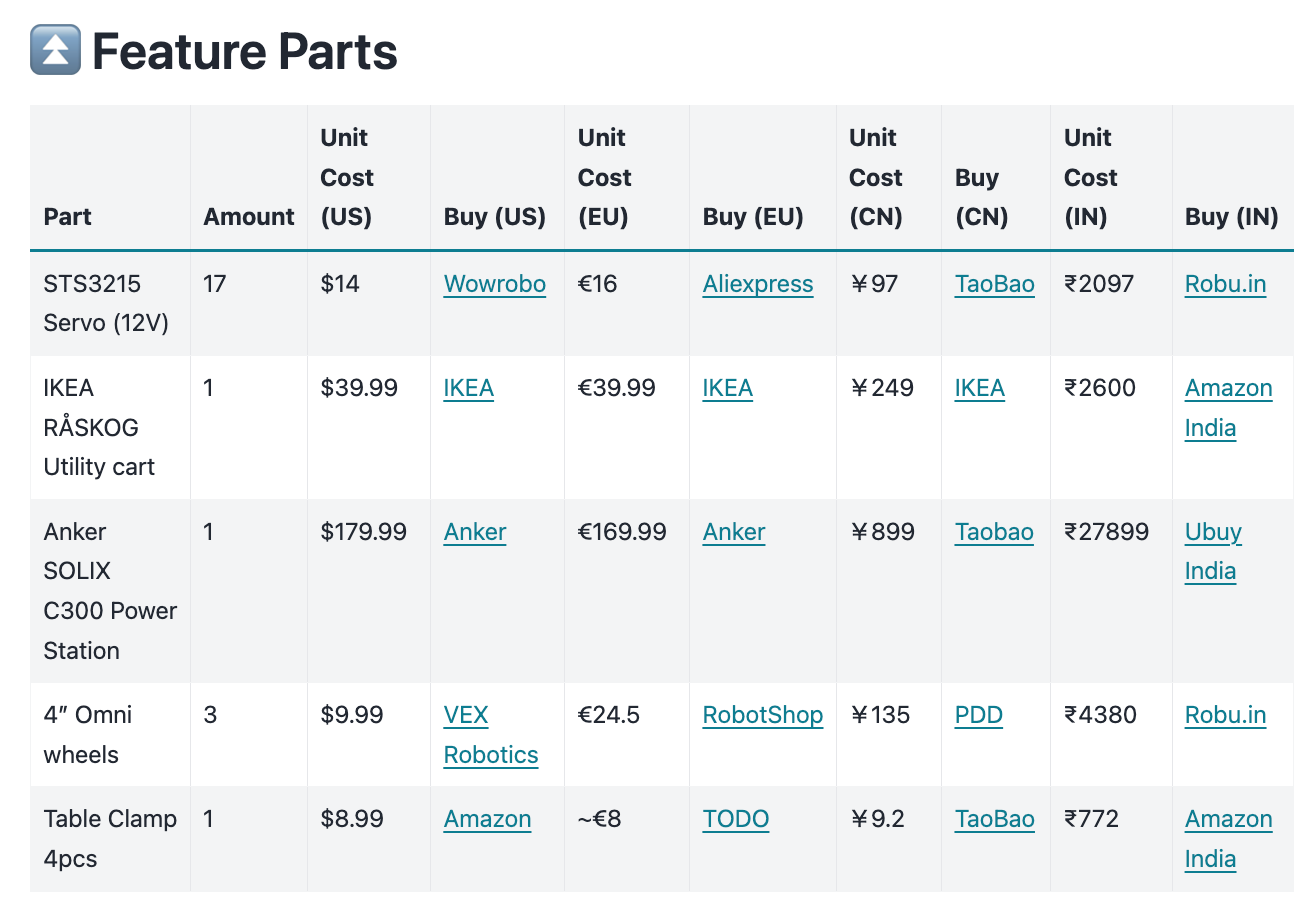
Feature parts
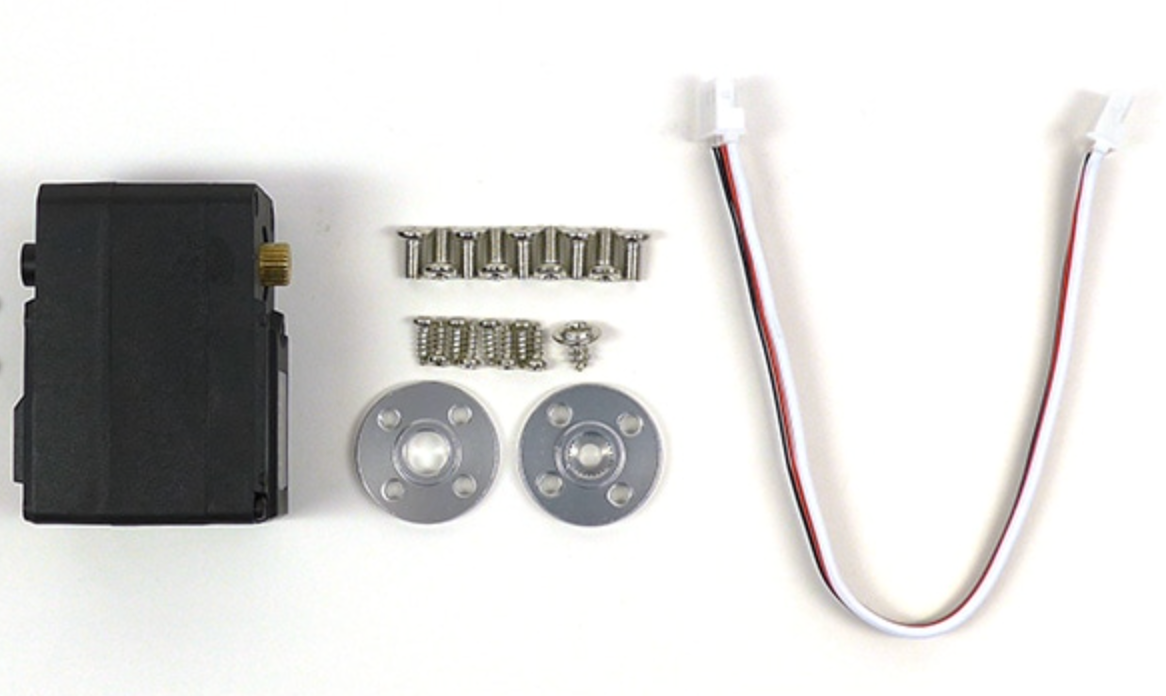
STS3215 Servo (12V)
SO-101 Armでお馴染みのSTS3215です。
秋月で3280円で、17個なので、55,760円です。
https://akizukidenshi.com/catalog/g/g130969/

私はHugging Face主催のHackathonの賞品でSO-Arm101とLekiwiをいただき、十分なsts3215を持っていたのでこちらは新規購入なしです。
IKEA RÅSKOG Utility cart
IKEAのカートです。国内で購入すると、2,799円です。
複数サイズ展開があるので、間違えないようにしてください。35cm x 45cm x 77cmのものが必要です。
https://www.ikea.com/jp/ja/p/raskog-trolley-black-60586786/#content

USでは$40、EUでは€40するので、お買い得ですね!
Anker SOLIX C300 Power Station
ポータブル電源です。コンセントなしで給電する必要があるので、ほぼ必須となります。
定価は35,000円ですが、タイムセールで24,900円になっていました。
自分が買った際も25,000円程度だったので、それくらいになるはずです。
ある程度のグレードであれば問題ないので、好きな物を選んでみてください。

4" Omni wheels
オムニホイールです。
Amazonやロボットショップで購入可能です。
3500円弱で3つ必要なので、計約10000円です
https://amzn.asia/d/fgZtf7h
https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&products_id=3757&srsltid=AfmBOooFlBgyBI9tlbhkPw3ZQ2aPiLFK4OorlQedu-99n-djyeSAn69l

LeKiwiで利用されるオムホイールと同一の賞品なので、Seeed StudioのLeKiwi Kitを購入すると、一度で二度楽しめます(は?)
https://jp.seeedstudio.com/LeKiwi-Full-Kit-12V-Verision.html
Table Cramp 4 pcs
SO-Arm101を触ったことのある人には馴染み深いTakagiのTable Crampです。
先日のAMD Hackathonでは、日本中のTakagiのTable Crampが集まっていました。
Amazonで2本入りが499円なので、合計1000円程です。
注意点としては、XLeRobotでは、SO-Arm101と違って、長い距離で挟む必要があるので対応できるクランプが限られます。

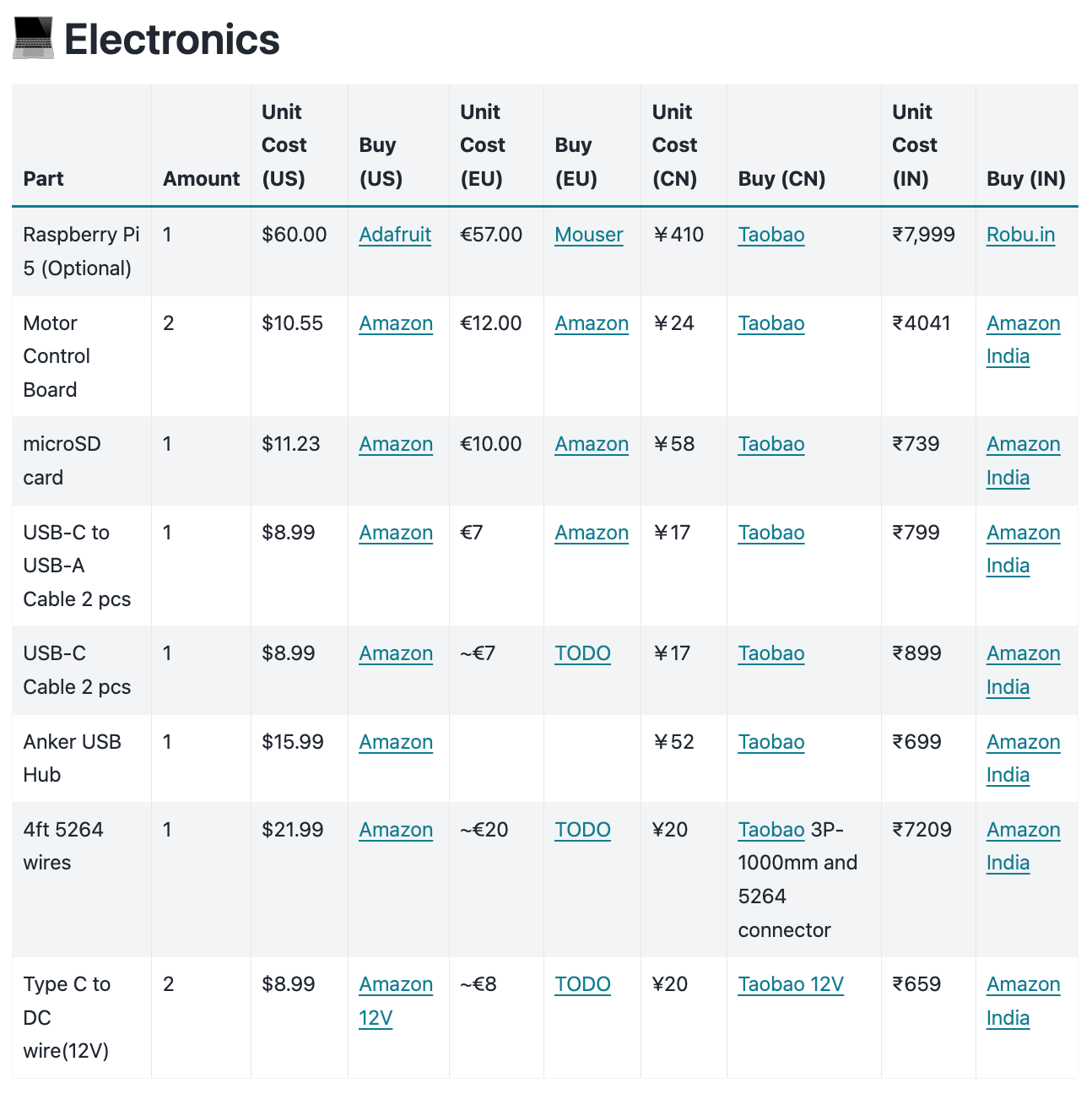
Electronics
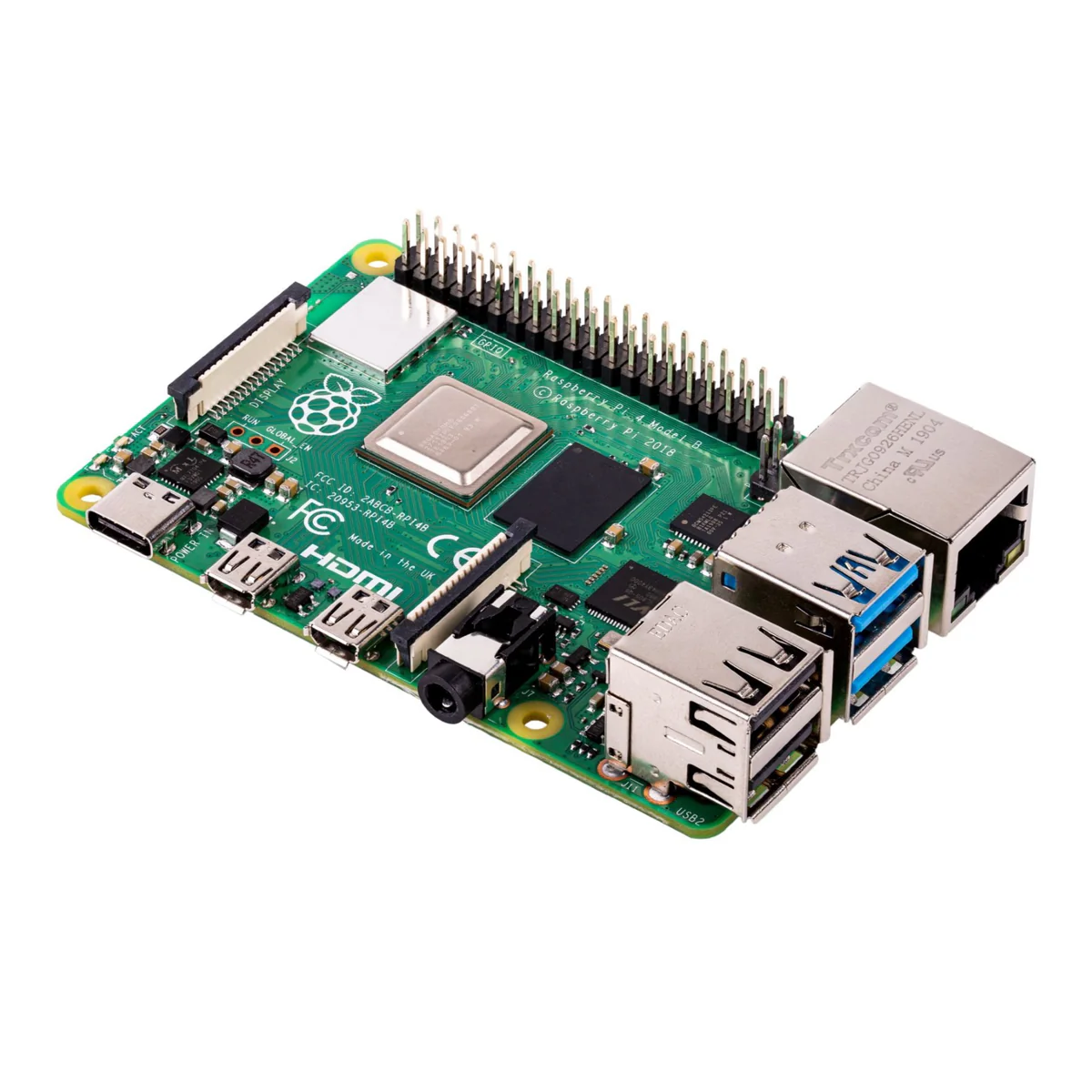
Raspberry Pi 5 (Optional)
Optionalにはなっていますが、ないと無線で制御できないので困ります。
自分は自宅に転がっていたラズパイ4を利用しています。
ミニPCやJetsonなどでも問題ないでしょう。
参考までに秋月のラズパイ5は22,440円でした。高いですね。
https://akizukidenshi.com/catalog/g/g130199/
Motor Control Board
sts3215のドライバーボードです。1個980円で、2個必要です。
https://akizukidenshi.com/catalog/g/g131227/
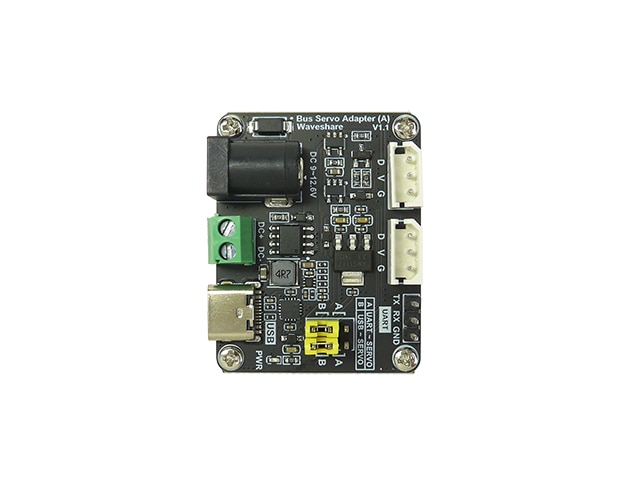
端子が二口あれば問題ないので、私は以前から使っているFeetechのものを使っています。こちらは1420円なので、WaveShareの方がお買い得ですね。
https://akizukidenshi.com/catalog/g/g116295/
microSD card, USB-C to USB-A Cable 2 pcs, USB-C Cable 2 pcs, Anker USB Hub
この辺りはご家庭に転がっている好きな物を利用してください
4ft 5264 wires
これがかなり難問でした
sts3215のモータ同士やドライバー基盤を繋ぐためのケーブルなのですが、付属のケーブルは長さが足りないため使えません。
しかし都合よく長いケーブルが売っているわけではないです。
GitHub上でも
Ready-made long 5264 wires are not available for purchase in the US—only connector kits are available that require manual assembly to extend the length (still easy).
と言及されており、日本から手に入れるのは大変そうでした。
自前でケーブルを作るのは絶対に嫌だ!と思ったので、
https://a.aliexpress.com/_c3ynXsU1

こういった片方の端にコネクタが付いていて、もう片方は短いケーブルの先端が出ている形状の部品をアリエクで購入して利用することにしました。ピグテールなんても呼ばれるようです。
延長する際は、適当なケーブルと以下のようなコネクタを利用することで、半田付けなしで接続することにしました。
送料込みでピグテールが500円程度、コネクタが1000円程度でした。
Type C to DC wire(12V)
以下のトリガーケーブルと変換ケーブルを利用していました。
電源を延長したい時も先述のコネクタが便利でした。
それぞれ892円、875円でした。


ちなみに、トリガーケーブルと呼ばれているこのケーブルは、USB PD (Power Delivery)対応のUSB-C充電器から、5V以外の任意の電圧を取り出すための特殊なケーブルです。PD充電器は充電先の機器と通信して、適切な電圧を供給する仕組みなのですが、トリガーケーブルが仮想的な機器として働き必要な電圧を出力することができます。便利な商品があるんですね。 (ご利用は自己責任でお願いします)
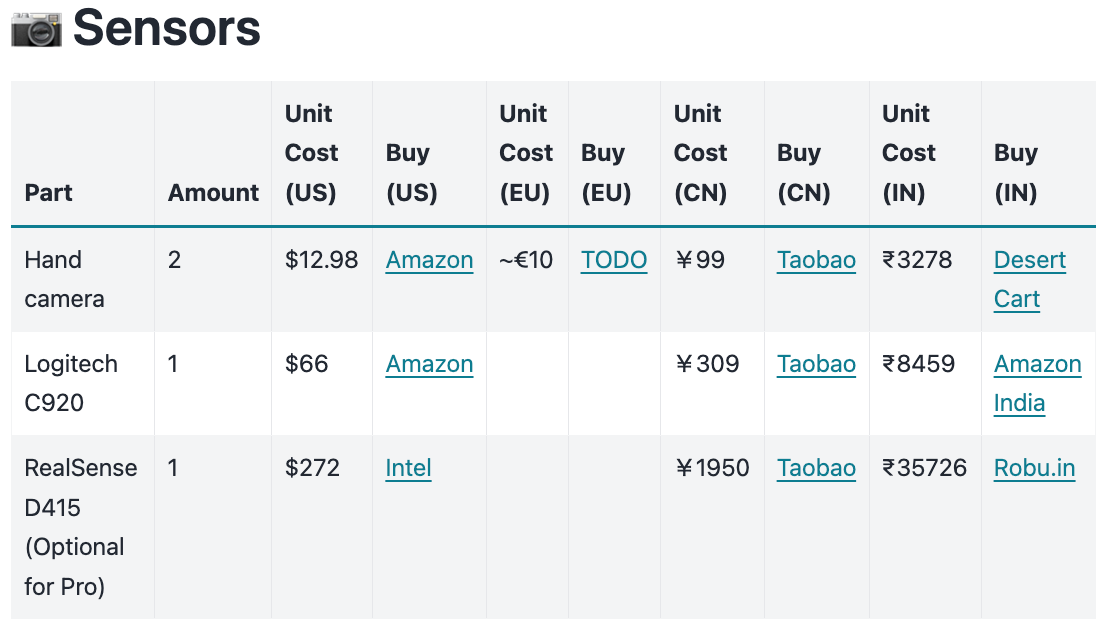
Sensors
Hand camera
アーム用のカメラです。1つ2599円で両腕に取り付けるため2つ必要です。

Head Cam
頭に取り付けるカメラです。
Logicoolのものだと14,899円です。
自分はIntelのRealsense D435iをメルカリにて23,500円で購入しました。
参考までに、RealSense D415はスイッチサイエンスで77,506円でした。


集計
最後に、XLeRobotを製作するためにかかった費用をまとめます。
表には、筆者が実際にかかった費用と、ゼロからすべての部品を新品(または推奨品)で揃えた場合の概算費用を記載しました。
| カテゴリ | 部品名 | 筆者の出費 (実績) | ゼロから揃える場合 (概算) |
|---|---|---|---|
| Tools | M3 Screws / Nuts Set | ¥1,387 | ¥1,387 |
| 工具類 (ニッパー・ドライバー) | ¥0 | ¥0 | |
| Parts | STS3215 Servo (17個) | ¥0 | ¥55,760 |
| IKEA RÅSKOG ワゴン | ¥2,799 | ¥2,799 | |
| Anker SOLIX C300 (電源) | ¥25,000 | ¥25,000 | |
| 4" Omni wheels (3個) | ¥0 | ¥10,000 | |
| Table Clamp (4本) | ¥1,000 | ¥1,000 | |
| Elecs | Raspberry Pi 5 | ¥0 | ¥22,440 |
| Motor Control Board (2個) | ¥0 | ¥1,960 | |
| ケーブル・コネクタ類 (自作分) | ¥1,500 | ¥1,500 | |
| Type C to DC (12V) 給電一式 | ¥1,767 | ¥1,767 | |
| Sensors | Hand camera (2個) | ¥5,198 | ¥5,198 |
| Head Cam | ¥23,500 | ¥14,899 | |
| 合計 | 約 ¥62,151 | 約 ¥143,710 |
めちゃめちゃコスパ良く作っているつもりだったんですが、かなりお金かかっていましたね。
とはいえ、ヒューマノイドを買ってくるよりはるかに安いのでおすすめです。
最後に
今回は、XLeRobotを構築するために必要なハードウェアの選定と購入品についてまとめました。
記事中でも触れましたが、特にケーブル類や細かいパーツは日本国内での入手性が悪く、代用品を探すのに一番苦労しました。
総額約14万円というのは、決して安くはないですが、双腕かつ全方向移動を可能なマニピュレータがこの価格帯で手に入り、しかも構造を完全に理解した状態でメンテナンスや改造ができるというのは、オープンソースハードウェアならではの素晴らしい体験だと思いました。
フィジカルAIの力を最大限活用して、さまざまなタスクに拡張する上で、SO-Armの次として良いハードウェアなので、ぜひ興味がある方は挑戦してみてください。