はじめに
定番のGANs(pix2pix)線画着彩を、無料のGoogle Colabでやってみました。
教師データが大きく、また学習時間も長いので、Colabでやるには多少工夫が必要です。
pix2pixの説明は、他の方の分かりやすい記事を見て頂くとよいかと思います。
先にU-Netを理解してからだと、pix2pixの理解が早いと思います。
https://qiita.com/koshian2/items/603106c228ac6b7d8356
https://qiita.com/mine820/items/36ffc3c0aea0b98027fd
事前準備
美少女イラストを収集・厳選・加工し、線画と着彩のデータセットを用意します(以下参考)。
https://www.mathgram.xyz/entry/scraping/pixiv
https://qiita.com/mo-do/items/c7d53507f23f72daea69
https://qiita.com/pashango2/items/145d858eff3c505c100a
npyファイルでGoogle Diveにアップします(ディレクトリ構成はソースコード参照)。
今回は128x128のサイズで3万枚を訓練用、6000枚をテスト用としました。
無料の15G枠でも収まるデータ量です(着彩1.8G、線画600M)。
仮にもっと大きいデータを使う場合でも、100G枠で250円/月とリーズナブルです。
ソースコード
Kerasでの実装です。
GPUランタイムで上から順にコピペすれば動きます。
モデルは下記から拝借しています。
https://github.com/eriklindernoren/Keras-GAN/blob/master/pix2pix/pix2pix.py
必要なimportは以下です。
import sys, time, os, json
import numpy as np
import matplotlib.pylab as plt
from PIL import Image
from keras.models import *
from keras.layers import *
from keras.optimizers import *
from google.colab import drive
Google Diveをマウント
drive_root = '/content/drive'
drive.mount(drive_root)
datasets_dir = "%s/My Drive/datasets"%drive_root
train_dir = "%s/My Drive/train/pix128"%drive_root
os.makedirs(train_dir, exist_ok=True)
実行すると認証を求められるので、認証コードを入れてEnterします。
モデル
生成モデルはU-Netです。
線画を受け取り、同じ大きさの着彩を出力します。
def Unet(img_shape):
def conv2d(x, filters, bn=True):
x = Conv2D(filters, 4, strides=2, padding='same')(x)
x = LeakyReLU(0.2)(x)
if bn:
x = BatchNormalization(momentum=0.8)(x)
return x
def deconv2d(x, contracting_path, filters, drop_rate=0):
x = UpSampling2D(2)(x)
x = Conv2D(filters, 4, padding='same', activation='relu')(x)
if drop_rate:
x = Dropout(drop_rate)(x)
x = BatchNormalization(momentum=0.8)(x)
return Concatenate()([x, contracting_path])
img_B = Input(img_shape)
#エンコーダー
c1 = conv2d(img_B, 64, False)
c2 = conv2d(c1, 128)
c3 = conv2d(c2, 256)
c4 = conv2d(c3, 512)
c5 = conv2d(c4, 512)
c6 = conv2d(c5, 512)
#中間層
x = conv2d(c6, 512)
#デコーダー
x = deconv2d(x, c6, 512)
x = deconv2d(x, c5, 512)
x = deconv2d(x, c4, 512)
x = deconv2d(x, c3, 256)
x = deconv2d(x, c2, 128)
x = deconv2d(x, c1, 64)
#元サイズ出力
x = UpSampling2D(2)(x)
x = Conv2D(img_shape[-1], 4, padding='same', activation='tanh')(x)
return Model(img_B, x)
識別モデルは単純な畳み込みです。
線画と着彩を受け取り、真偽をPatchGANサイズで出力します。
def Discriminator(img_shape):
def d_layer(x, filters, bn=True):
x = Conv2D(filters, 4, strides=2, padding='same')(x)
x = LeakyReLU(0.2)(x)
if bn:
x = BatchNormalization(momentum=0.8)(x)
return x
img_A = Input(img_shape)
img_B = Input(img_shape)
x = Concatenate()([img_A, img_B])
#PatchGANのサイズまで畳み込み
x = d_layer(x, 64, False)
x = d_layer(x, 128)
x = d_layer(x, 256)
x = d_layer(x, 512)
#0〜1ラベル出力
x = Conv2D(1, 4, padding='same')(x)
return Model([img_A, img_B], x)
生成モデルを訓練するための結合モデルです。
def Pix2Pix(gen, disc, img_shape):
img_A = Input(img_shape)
img_B = Input(img_shape)
fake_A = gen(img_B)
valid = disc([fake_A, img_B])
return Model([img_A, img_B], [valid, fake_A])
訓練
genとdiscをエポックごとに保存して、稼働時限を超えても最後のエポックから再開します。
img_sizeを大きくする場合、batch_sizeを減らさないとColabのGPUメモリが不足します。
512x512の場合、batch_size=10が限界でした(なお20日以上かかります)。
def train():
#教師データ
train_num = 30000
test_num = 6000
img_size = 128
img_shape = (img_size,img_size,3)
train_A = load_datasets("%s/color.npy"%datasets_dir, train_num+test_num, img_shape)
train_B = load_datasets("%s/line.npy"%datasets_dir, train_num+test_num, (img_size,img_size))
#訓練回数
epochs = 200
batch_size = 100
batch_num = train_num // batch_size
#前回までの訓練情報
info_path = "%s/info.json"%train_dir
info = get_json(info_path, lambda: {"epoch":0})
#PatchGAN
patch_shape = (img_size//16, img_size//16, 1)
valid = np.ones((batch_size,) + patch_shape)
fake = np.zeros((batch_size,) + patch_shape)
#モデル
opt = Adam(0.0002, 0.5)
gen_path = "%s/gen.h5"%train_dir
disc_path = "%s/disc.h5"%train_dir
if os.path.isfile(disc_path):
gen = load_model(gen_path)
disc = load_model(disc_path)
print_img(1, gen, train_A, train_B, 0, train_num, "train")
print_img(1, gen, train_A, train_B, train_num, test_num, "test")
else:
gen = Unet(img_shape)
disc = Discriminator(img_shape)
disc.compile(loss='mse', optimizer=opt, metrics=['accuracy'])
disc.trainable = False
pix2pix= Pix2Pix(gen, disc, img_shape)
pix2pix.compile(loss=['mse', 'mae'], loss_weights=[1, 100], optimizer=opt)
#エポック
for e in range(info["epoch"], epochs):
start = time.time()
#ミニバッチ
for i in range(batch_num):
#バッチ範囲をランダム選択
idx = np.random.choice(train_num, batch_size, replace=False)
imgs_A = train_A[idx].astype(np.float32) / 255
imgs_B = convert_rgb(train_B[idx]).astype(np.float32) / 255
#識別訓練
fake_A = gen.predict(imgs_B)
d_loss_real = disc.train_on_batch([imgs_A, imgs_B], valid)
d_loss_fake = disc.train_on_batch([fake_A, imgs_B], fake)
d_loss = np.add(d_loss_real, d_loss_fake) * 0.5
#生成訓練
g_loss = pix2pix.train_on_batch([imgs_A, imgs_B], [valid, imgs_A])
#ログ
print("\repoch:%d/%d batch:%d/%d %ds d_loss:%s g_loss:%s" %
(e+1,epochs, (i+1),batch_num, (time.time()-start), d_loss[0], g_loss[0]), end="")
sys.stdout.flush()
print()
#画像生成テスト
print_img(e+1, gen, train_A, train_B, 0, train_num, "train")
print_img(e+1, gen, train_A, train_B, train_num, test_num, "test")
#重みの保存
gen.save(gen_path)
disc.save(disc_path)
info["epoch"] += 1
with open(info_path, "w") as f:
json.dump(info, f)
教師データを全て乗せてしまうとColabのRAMが不足します(512x512の場合)。
なのでmemmapでバッチ単位で読み出します。
def load_datasets(path, train_num, img_shape):
return np.memmap(path, dtype=np.uint8, mode="r", shape=(train_num,)+img_shape)
学習済みのエポック数はjsonに記録します。
def get_json(json_name, init_func):
if os.path.isfile(json_name):
with open(json_name) as f:
return json.load(f)
else:
return init_func()
格納効率から線画はグレースケールで保存しています。
モデルに渡す際はRGBに変換が必要です。
def convert_rgb(train_B):
return np.array([np.asarray(Image.fromarray(x).convert("RGB")) for x in train_B])
10エポックごとに着彩結果を出力します。
訓練用とテスト用を両方出力して、汎用度を見てみます。
def print_img(e, gen, train_A, train_B, offset, limit, title):
if e % 10 == 0 or e == 1:
#データをランダム選択
num = 10
idx = np.random.choice(limit, num, replace=False) + offset
imgs_A = train_A[idx]
imgs_B = convert_rgb(train_B[idx])
#生成してみる
fake_A = gen.predict(imgs_B.astype(np.float32) / 255)
fake_A = (fake_A * 255).clip(0).astype(np.uint8)
#繋げる
imgs_A = np.concatenate(imgs_A, axis=1)
imgs_B = np.concatenate(imgs_B, axis=1)
fake_A = np.concatenate(fake_A, axis=1)
imgs = np.concatenate((imgs_B,imgs_A,fake_A), axis=0)
#プロット
plt.figure(figsize=(20, 6))
plt.title(title)
plt.imshow(imgs)
plt.axis('off')
plt.show()
# 実行
train()
実行結果
1エポック(test)
人物と背景の区別は少しつくようです。
10エポック(test)

すでになんとなく塗れています。すごい。
26エポック(train)
(ミスって20エポックの画像取れなかった)

このくらいからtrainデータの色の再現度がかなり高くなってます。
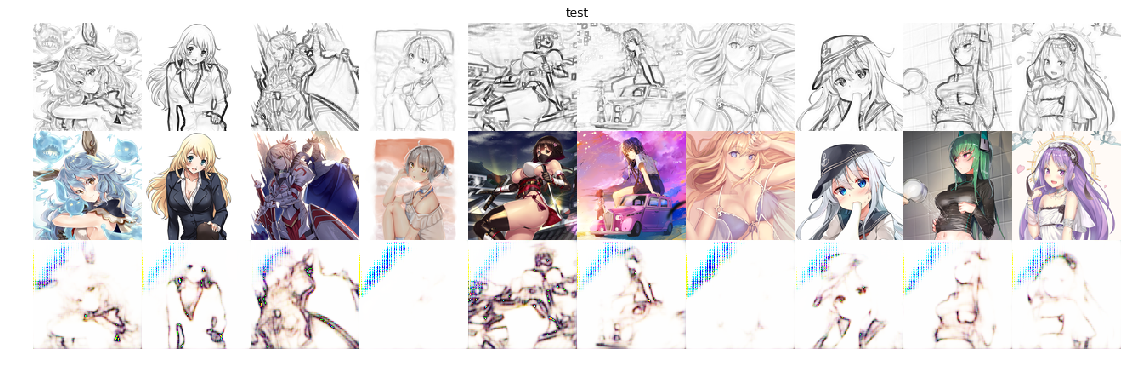
60エポック(test)

緑の点々は気になりますが、だいぶ色彩豊かになりました。
ルナちゃんの胸元が布になったところに、別の可能性を感じます(センシティブ部位の自動修正など)。
※5/20追記:緑の点々は clip(0) を入れることで解決しました(コード修正済み)。
実行時間
128x128の3万枚で1エポック550秒かかりました(200エポックで約30時間の計算)。
PaintsChainerは512x512を60万枚だと思われますので、この実装とスペックだと約400日でしょうか。
512x512はColab TPUが必要そうです(定評ではGPUの15~30倍のポテンシャル)。
しかしエラーで上手く動かなかったので、チャレンジ中です。
※5/20追記:コメントで指摘いただいておりますが、現行のTPUは複数グラフをサポートしていなかったようです。
おわりに
Google Colabのおかげで無料でも美少女イラストのGANsを楽しめることが分かりました。
それに実装も簡単なので、興味のある人はどんどんやってみることをオススメしたいです。