Klamp't (Kris' Locomotion and Manipulation Planning Toolbox)
概要
Klamp't(Kris'Locomotion and Manipulation Planning Toolbox)は、ロボットのモデリング、シミュレーション、計画、最適化、および視覚化のためのオープンソースのクロスプラットフォームソフトウェアパッケージです。これは、ロボット工学の学習、ロボットの分析、アルゴリズムの開発、およびインテリジェントな動作のプロトタイピングのための、アクセス可能な幅広いプログラミングツールを提供することを目的としています。ロボットの操作と移動に特に強みがあります。
歴史的に、それは主に研究プラットフォームとして2009年からインディアナ大学で開発を開始しました。 2013年以降、インディアナ大学とデューク大学の教育で使用されています。それ以来、世界中の他のラボで採用されています。
特徴
- ロボットモデリング、キネマティクス、ダイナミクス、制御、動作計画、シミュレーション、および視覚化のための統合C ++およびPythonパッケージ。
- 脚式および固定ベースのロボットをサポート
- Robot Operating System(ROS)およびOpen Motion Planning Library(OMPL)と相互運用可能
- 多くのサンプリングベースのモーションプランナーが実装されている
- 高速軌道最適化
- リアルタイムの動作計画
- フォワードおよびインバースキネマティクス、フォワードおよびインバースダイナミクス
- 接触力学の計算(力の閉鎖、サポートポリゴン、剛体および作動ロボットの安定性)
- 計画モデルは、シミュレーションモデルから完全に切り離されています。これは、不確実性とモデリングエラーのシミュレーションに役立ちます。
- 三角形メッシュ/三角形メッシュの衝突によるロバストな剛体シミュレーション。
- PID制御、トルク制御、および速度制御モーターのシミュレーション。
- カメラ、深度センサー、レーザー距離計、ジャイロスコープ、力/トルクセンサー、加速度計などのさまざまなセンサーのシミュレーション。
- いくつかのプラットフォームで動作(*nux環境,Windows,MacOS,Google Colab)
使ってみる
install
環境
ubuntu18.04
intall
pip3 install klampt
pip3 install PyQt5
git clone http://github.com/krishauser/Klampt-examples
cd Klampt-examples/Python3/demos
デモ
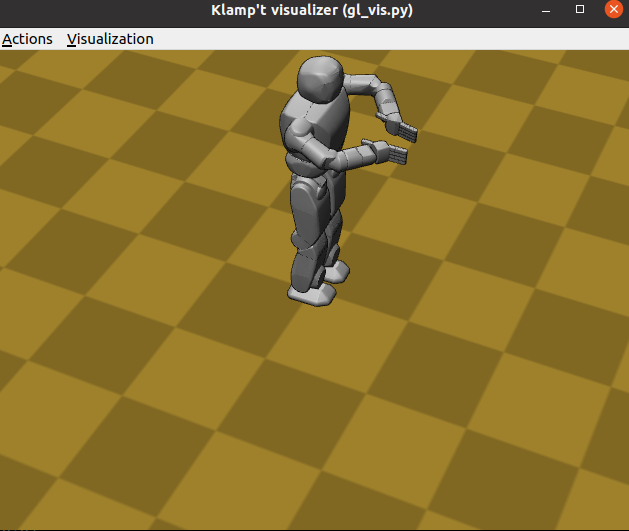
gl_vis
python3 gl_vis.py
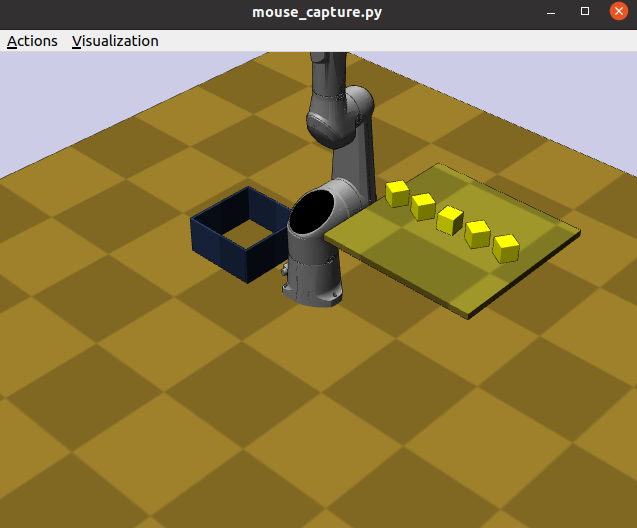
mouse_capture
python3 mouse_capture.py
path_test
python3 path_test.py
planning_test
pyhton3 planning_test.py

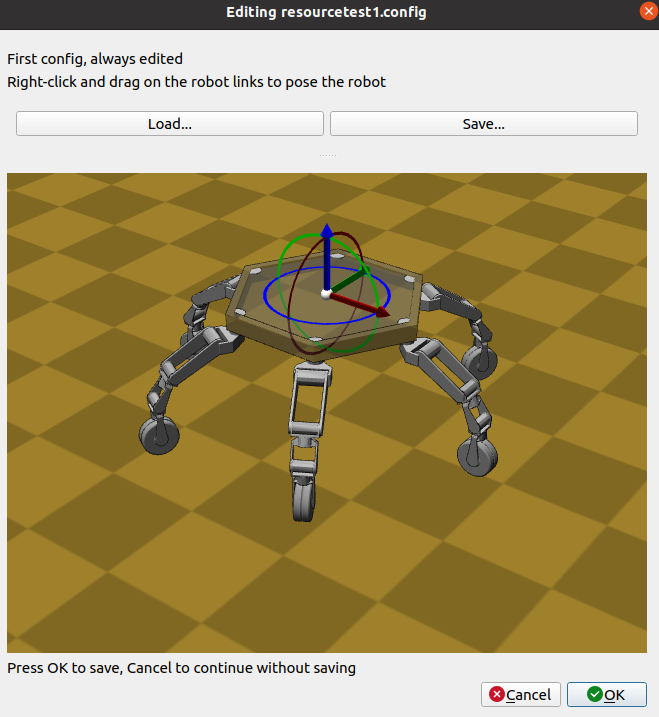
resouce_demo
python3 resouce_demo.py
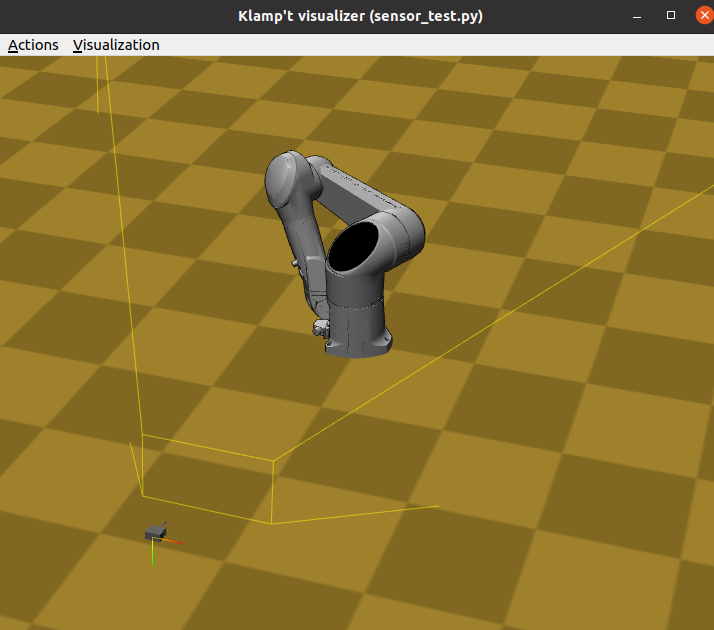
sensor_test
python3 sensor_test.py
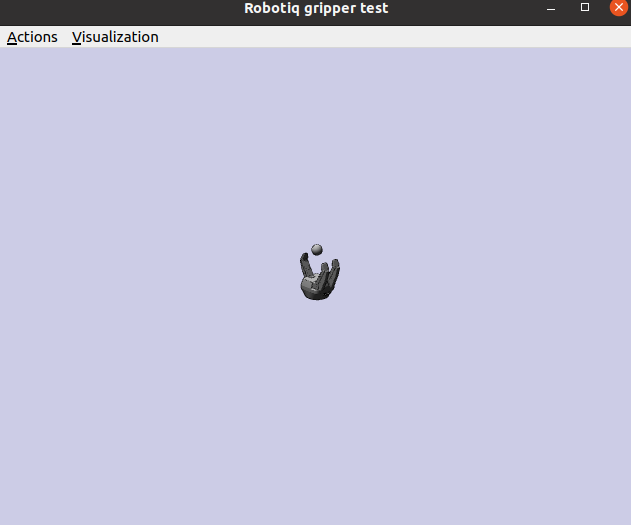
robotiq_test
python3 robotiq_test.py
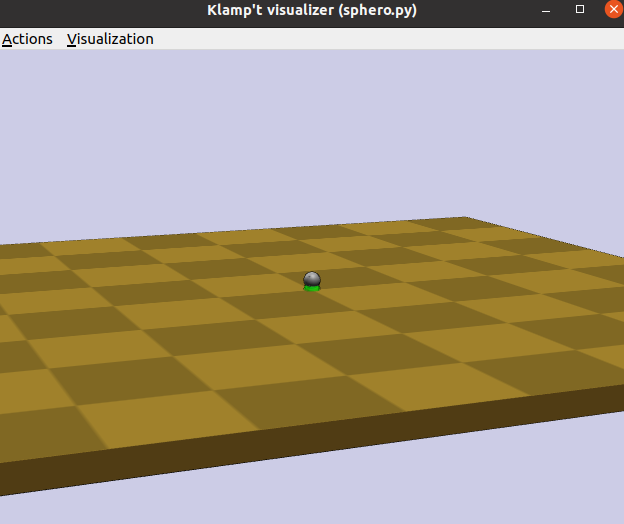
sphero.py
python3 sphero.py
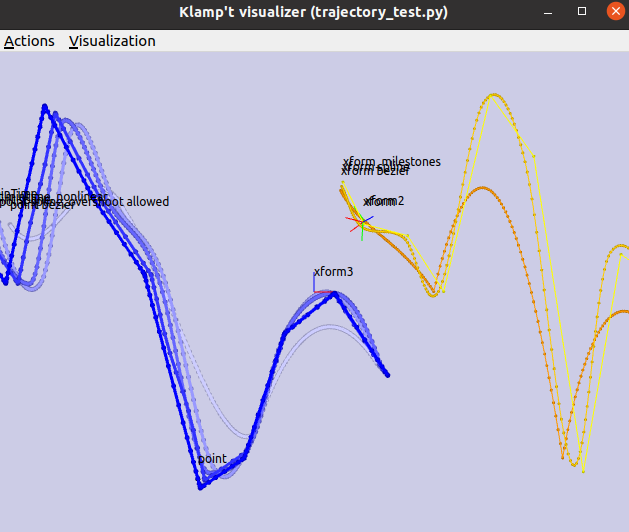
trajectory_test
python3 trajectory_test.py