turlebot3 simulator で自律走行を試した際のメモです!
1.ロボットの起動
turtlebot3_gazebo等の,インストール方法はこちら
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launch
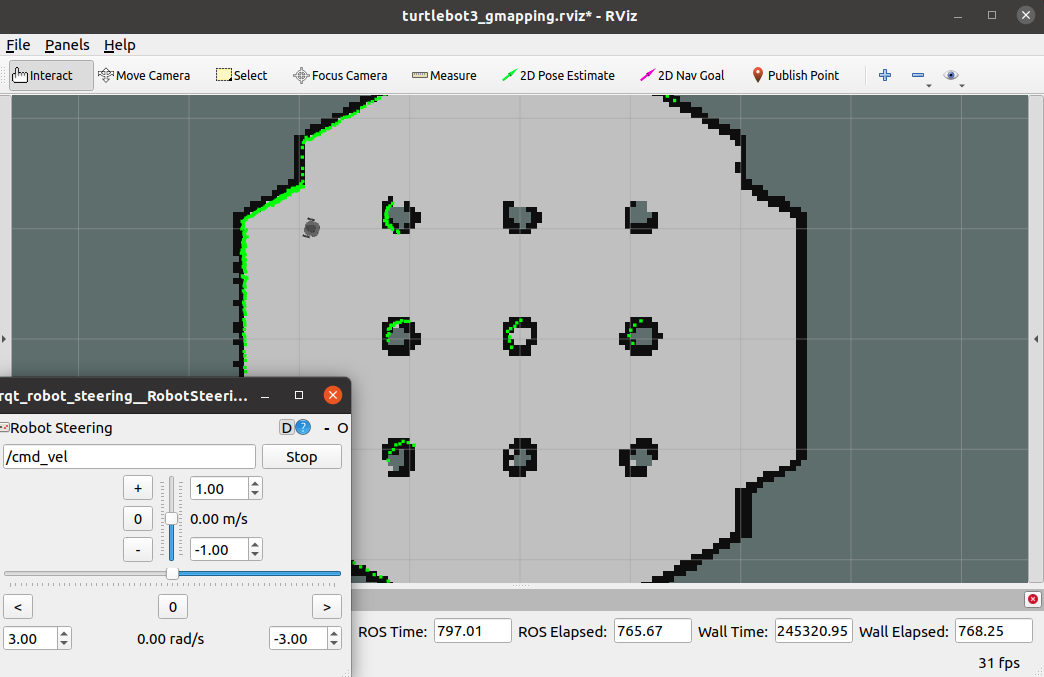
2.地図の作成
- slamの実行
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
- ロボットの操作パネルの実行
rosrun rqt_robot_steering rqt_robot_steering
上記2つのノード起動後,ロボットを操作パネルから動かして地図を作成します.
- mapの保存
地図が完成したらmap_server/map_saverを使用して,ファイルに保存します.
rosrun map_server map_saver -f map
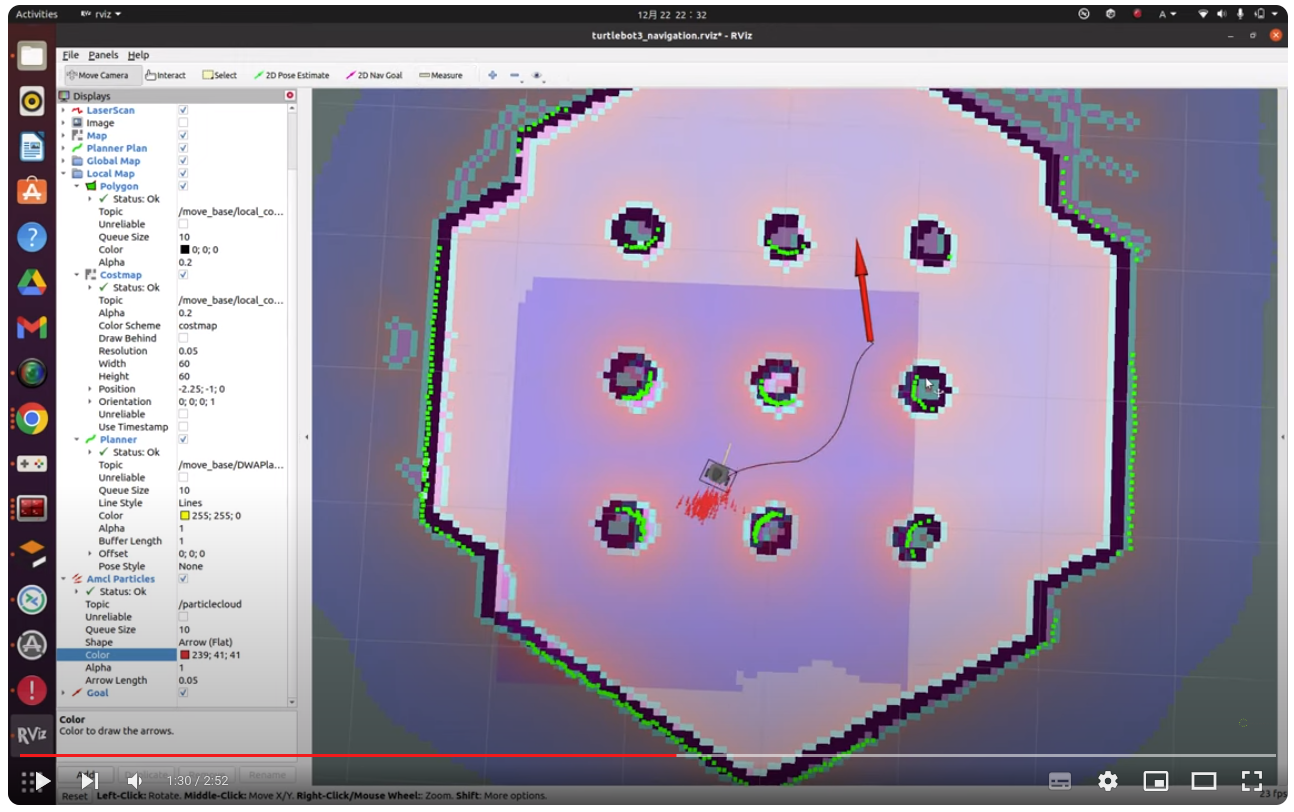
3.自律走行
2.地図の作成で実行したSLAMのコードは停止して,下記コマンドを実行すると自律走行に必要なamclやmove_baseとうのノードが起動します.
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
エラーなく実行できたらRvizの2D Pose Estimateでamclに現在位置を指定してあげれば,Rvizの2D Nav Goalなどから自律走行ができます.
エラー対策
move_baseのプラグインがインストールされていない
- エラー内容
[FATAL] [1703251523.987719066, 5781.166000000]: Failed to create the dwa_local_planner/DWAPlannerROS planner, are you sure it is properly registered and that the containing library is built? Exception: According to the loaded plugin descriptions the class dwa_local_planner/DWAPlannerROS with base class type nav_core::BaseLocalPlanner does not exist. Declared types are base_local_planner/TrajectoryPlannerROS
[move_base-4] process has died [pid 1817071, exit code 1, cmd /opt/ros/noetic/lib/move_base/move_base cmd_vel:=/cmd_vel odom:=odom __name:=move_base __log:=/home/dev/.ros/log/6ede42da-a0a5-11ee-bbe5-21225b0a423d/move_base-4.log].
log file: /home/dev/.ros/log/6ede42da-a0a5-11ee-bbe5-21225b0a423d/move_base-4*.log
- 対策
export TURTLEBOT3_MODEL=burger
sudo apt install ros-noetic-dwa-local-planner
参考: https://qiita.com/seigot/items/a13558e92c84f676dd0a
宣伝
販売製品
- 3D Vision Controller : ロボットアームによる3次元ピッキングを実現可能にします!
お仕事依頼お受けしています!
-
メールアドレス : ryotaro.hoshina@gmail.com
-
coconala : https://coconala.com/users/4162706
-
CloudWorks : https://crowdworks.jp/public/employees/5569031