はじめに
PyBullet (Python上で動く物理シミュレータ) を使用して,ロボットアームを可視化して,動かしたい.
前記事では,PyBullet (Python上で動く物理シミュレータ) で2軸ロボットアームを使用して,干渉回避する経路生成を実装した.
(https://qiita.com/haruhiro1020/items/cc29d72d291158fdc1ce)
本記事では,PyBullet (Python上で動く物理シミュレータ) で3軸ロボットアームを可視化し,スライダーを用いて関節角度を簡単に変更できるようにする.
本記事では,下図のような3軸ロボットアームを動かす(下図はPyBullet上の3軸ロボットアームである).
下図の赤枠内のスライダーを動かすことによって,関節角度を自由に設定して,ロボットを動かす.

本記事で実装すること
・PyBullet で3軸ロボットアームの関節角度を設定することで,動かす
本記事では実装できないこと (将来実装したい内容)
・PyBullet で3軸ロボットアームの手先位置を設定することで,動かす
・PyBullet で干渉物が存在する環境下での経路生成
動作環境
・macOS Sequoia (バージョン15.5)
・Python3 (3.13.3)
・PyBullet (3.2.5) (物理シミュレータ)
・Numpy (2.3.0) (数値計算用ライブラリ)
3軸ロボットアームの定義
本記事で動かしたい,3軸ロボットアームについて説明する.
本記事では,下図のような3軸ロボットアームを考えている.
$\theta_{1}$はZ軸方向, $\theta_{2}, \theta_{3}$ はY軸方向へ回転する.
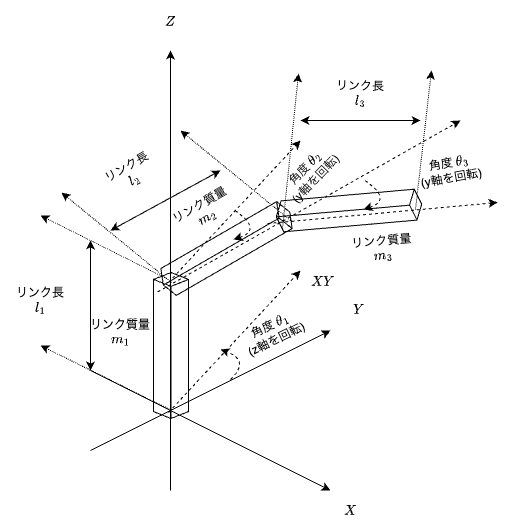
上図のパラメータ $l_{1}, l_{2}, l_{3}, m_{1}, m_{2}, m_{3}$ の値は下表として,考える(値は適当である).
| パラメータ名 | 概要 | 値 |
|---|---|---|
| $l_{1}$ | リンク$1$の長さ | 1.0 [m] |
| $l_{2}$ | リンク$2$の長さ | 1.0 [m] |
| $l_{3}$ | リンク$3$の長さ | 1.0 [m] |
| $m_{1}$ | リンク$1$の質量 | 1.0 [kg] |
| $m_{2}$ | リンク$2$の質量 | 1.0 [kg] |
| $m_{3}$ | リンク$3$の質量 | 1.0 [kg] |
PyBulletで,上図のロボットを使用するために,URDF (Unified Robot Description Format)を作成する必要がある.
3軸ロボットアームのURDF作成
PyBulletで,3軸ロボットアームを使用するためのURDF作成に関して説明する.
URDF作成に関しては,下記サイトを参考とした.
(https://qiita.com/srs/items/35bbaadd6c4be1e39bb9)
URDFの作成方法に関しては,前記事で記載したため,本記事では割愛する.
(前記事 https://qiita.com/haruhiro1020/items/ecc5215234350b663770)
URDFのソースコード
上記で定義した3軸ロボットアームのURDFソースコードを作成する.
下記がURDFのソースコードである.
URDFの中身について,後ほど説明する.
<?xml version="1.0"?>
<robot name="robot_3dof">
<!-- ベースリンク -->
<link name="base_link">
<!-- 見た目,干渉判定,慣性なし -->
</link>
<!-- ベースリンクとリンク1間の関節 -->
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="link1"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<limit lower="-3.14" upper="3.14" effort="100" velocity="5.0"/>
</joint>
<!-- リンク1 -->
<link name="link1">
<!-- 見た目 -->
<visual>
<origin xyz="0.0 0.0 0.5"/>
<geometry>
<box size="0.2 0.2 1.0"/>
</geometry>
</visual>
<!-- 干渉判定 -->
<collision>
<origin xyz="0.0 0.0 0.5"/>
<geometry>
<box size="0.2 0.2 1.0"/>
</geometry>
</collision>
<!-- 慣性行列 -->
<inertial>
<origin xyz="0.0 0.0 0.5"/>
<!-- 質量は適当 -->
<mass value="1.0"/>
<inertia ixx="0.0866667" iyy="0.0866667" izz="0.0066667" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<!-- リンク1とリンク2間の関節 -->
<joint name="joint2" type="revolute">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0 0 1.0" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<limit lower="-3.14" upper="3.14" effort="100" velocity="5.0"/>
</joint>
<!-- リンク2 -->
<link name="link2">
<!-- 見た目 -->
<visual>
<origin xyz="0.0 0.0 0.5"/>
<geometry>
<box size="0.2 0.2 1.0"/>
</geometry>
</visual>
<!-- 干渉判定 -->
<collision>
<origin xyz="0.0 0.0 0.5"/>
<geometry>
<box size="0.2 0.2 1.0"/>
</geometry>
</collision>
<!-- 慣性行列 -->
<inertial>
<origin xyz="0.0 0.0 0.5"/>
<!-- 質量は適当 -->
<mass value="1.0"/>
<inertia ixx="0.0866667" iyy="0.0866667" izz="0.0066667" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<!-- リンク2とリンク3間の関節 -->
<joint name="joint3" type="revolute">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 0 1.0" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<limit lower="-3.14" upper="3.14" effort="100" velocity="5.0"/>
</joint>
<!-- リンク3 -->
<link name="link3">
<!-- 見た目 -->
<visual>
<origin xyz="0.0 0.0 0.5"/>
<geometry>
<box size="0.2 0.2 1.0"/>
</geometry>
</visual>
<!-- 干渉判定 -->
<collision>
<origin xyz="0.0 0.0 0.5"/>
<geometry>
<box size="0.2 0.2 1.0"/>
</geometry>
</collision>
<!-- 慣性行列 -->
<inertial>
<origin xyz="0.0 0.0 0.5"/>
<!-- 質量は適当 -->
<mass value="1.0"/>
<inertia ixx="0.0866667" iyy="0.0866667" izz="0.0066667" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<!-- リンク3とエンドエフェクタ間の関節 -->
<joint name="ee_joint" type="fixed">
<parent link="link3"/>
<child link="ee_link"/>
<origin xyz="0 0 1.0" rpy="0 0 0"/>
</joint>
<!-- エンドエフェクタ -->
<link name="ee_link">
<visual>
<geometry>
<sphere radius="0.05"/>
</geometry>
<material name="red">
<color rgba="1 0 0 1"/>
</material>
</visual>
<!-- 見た目だけ定義して,干渉判定および慣性はなし -->
</link>
</robot>
URDFの説明
上記のURDFファイルの説明をする.
URDFファイルの各タグに関しては,前記事で説明したため,本記事では割愛する.
(前記事 https://qiita.com/haruhiro1020/items/ecc5215234350b663770)
PyBulletの使用方法
Pythonの物理シミュレータであるPyBulletの使用方法について説明する.
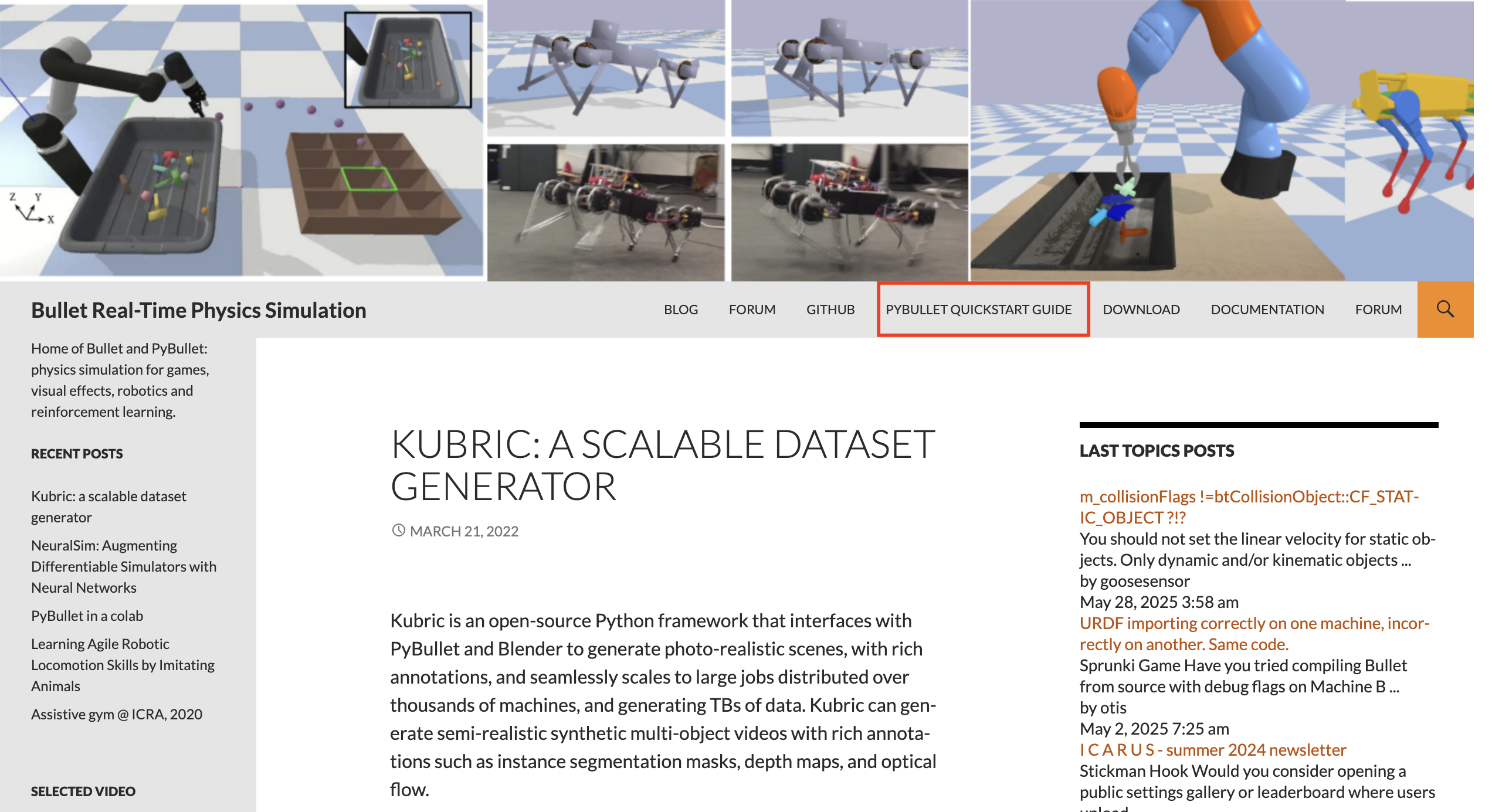
下記リンクのPyBullet公式で調べながら,PyBulletを使用している.
・https://pybullet.org/wordpress/
上記リンクを開くと,下図のようなサイトに飛ぶ.使用方法を調べるときは,下図の赤枠内の「PYBULLET QUICKSTART GUIDE」タグをクリックする.
「PYBULLET QUICKSTART GUIDE」タグをクリックすると,下図のようなドキュメントを見ることができる.基本的には,ドキュメントに記載されている関数の使用方法を見て,ソースコードを作成している.
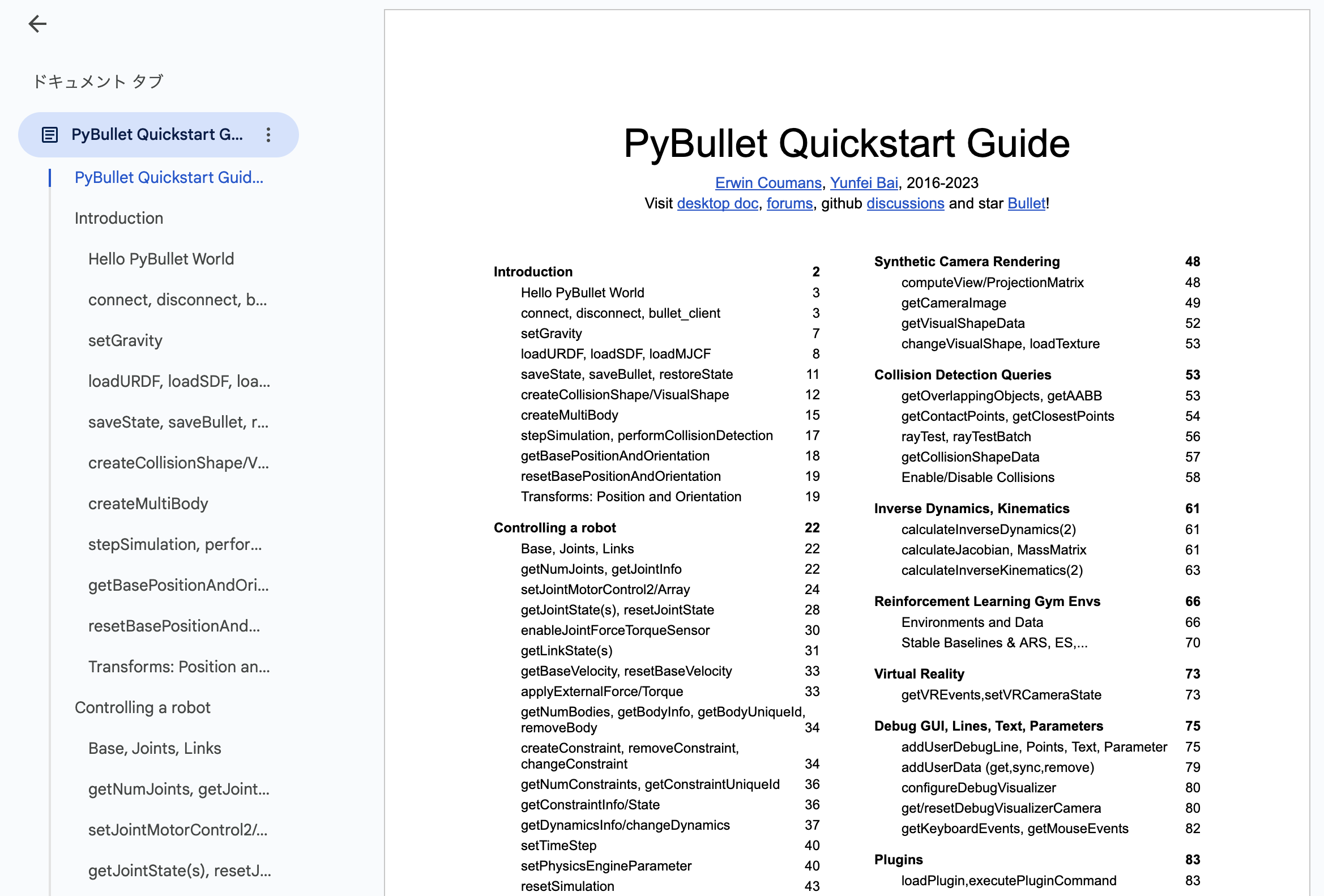
PyBulletの関数の引数や戻り値をもっと知りたいのでしたら,上記ドキュメントを見た方がわかりやすいです.
全体のソースコード
はじめに,本記事で使用する全体のソースコードについて説明する.
その後,重要な箇所を抜粋して別途解説をしていく.
ソースコードとして,下記の3ファイルを作成する.
・定数の定義 (constant.py)
・全体的なメイン処理 (main.py)
・PyBulletでロボットを動かす (pybullet_robot.py)
各ファイルの中身を説明する.
定数の定義 (constant.py)
定数を定義する constant.py について説明する.
本記事では,3軸ロボットアームの説明だが,6軸ロボットアームにも拡張していく予定である.
# 複数ファイルで使用する定数の定義
from enum import Enum
# 次元数を定義
DIMENTION_NONE = -1 # 未定義
DIMENTION_2D = 2 # 2次元
DIMENTION_3D = 3 # 3次元
# 重力
GRABITY_VALUE = 9.81
# 補間方法の定義
class INTERPOLATION(Enum):
"""
補間方法
"""
JOINT = "joint" # 関節補間
POSITION = "pos" # 位置補間
全体的なメイン処理 (main.py)
全体的なメイン処理を定義する main.py について説明する.
後ほど説明する pybullet_robot.py 内のクラスを実装するのがメインな処理である.
main.py 内で使用したいロボットを定義する.
# Pybullet (Pythonでの3次元物理シミュレータ) によるロボットアームの可視化
# 標準ライブラリの読み込み
# 自作モジュールの読み込み
from pybullet_robot import MainPyBulletRobot
from constant import *
def main():
"""
メイン処理
"""
# ロボットが保存されている URDF ファイル名
# robot_urdf = "robot_2dof.urdf" # 2軸ロボットアーム
robot_urdf = "robot_3dof.urdf" # 3軸ロボットアーム
# 探索空間を指定
interpolation = INTERPOLATION.JOINT.value
# Pybulletを使用するインスタンス作成
my_robot = MainPyBulletRobot(robot_urdf, interpolation)
my_robot.run()
if __name__ == "__main__":
# 本ファイルがメインで呼ばれた時の処理
main()
PyBulletでロボットを動かす (pybullet_robot.py)
PyBulletでロボットを動かす処理を定義する pybullet_robot.py について説明する.
# PyBulletで使用するロボットを記載
# ライブラリの読み込み
import pybullet as p # PyBullet
import pybullet_data # PyBulletで使用するデータ
import time # 時間
import numpy as np # 数値計算ライブラリ
# サードパーティの読み込み
# 自作モジュールの読み込み
from constant import *
class MainPyBulletRobot:
"""
PyBulletのメインクラス
プロパティ
_robot_id(): ロボットアームのID番号
_n_joints(int): ロボットアームの関節数
_interpolation(str): 探索空間 (直交空間/関節空間)
メソッド
public
メイン処理関連
run(): 実行 (スライダー内の情報を取得して,シミュレータ上のロボットを動かす)
protected
事前準備関連
_init_robot(): ロボットの初期化
_init_environment(): 環境の初期化
_init_sliders(): スライダーの初期化
_get_joint_limit(): 関節の限界値 (最小値 + 最大値) を取得
_get_init_thetas(): 初期角度を取得
メイン処理関連
_get_slider_values(): スライダー内の値を取得
_set_joint(): 関節角度の設定
_set_text(): GUIにテキストを設定
"""
# 定数の定義
_PLANE_URDF = "plane.urdf" # 地面に関する urdf ファイル
_IDX_MIN_JOINT = 8 # 関節の最小値が保存されている要素番号
_IDX_MAX_JOINT = 9 # 関節の最大値が保存されている要素番号
_JOINT_INIT = 0.0 # 関節の初期値
_SLIDER_MAKE_WAIT_TIME = 0.2 # スライダー作成の待機時間 [sec]
_SIMULATION_SLEEP_TIME = 1. / 240. # シミュレーションの待機時間 [sec]
_DEBUG_TEXT_LIFE_TIME = 0 # テキストの生存時間 [sec] (0は無限時間)
_DEBUG_TEXT_SIZE = 0.5 # テキストの大きさ
def __init__(self, robot_urdf, interpolation):
"""
コンストラクタ
パラメータ
robot_urdf(str): ロボットアームのファイル名 (urdf)
interpolation(str): 補間方法 (関節空間/位置空間)
"""
# PyBulletの初期化
p.connect(p.GUI)
# パスの追加
p.setAdditionalSearchPath(pybullet_data.getDataPath())
# シミュレーションの初期化
p.resetSimulation()
# 重力の設定 (下(-z軸)方向の加速度)
p.setGravity(0, 0, -GRABITY_VALUE)
# ロボットの初期化
self._init_robot(robot_urdf)
# 環境の初期化
self._init_environment()
# スライダーの初期化
self._init_sliders(interpolation)
# スライダー作成に時間がかかるため,少しまつ
time.sleep(self._SLIDER_MAKE_WAIT_TIME)
# 事前準備メソッド ↓
def _init_robot(self, robot_urdf):
"""
ロボットの初期化
パラメータ
robot_urdf(str): ロボットアームのファイル名 (urdf)
"""
# ロボットを読み込む.ベースリンクの原点は (x, y, z) = (0, 0, 0) として,ベースリンクは地面に固定
self._robot_id = p.loadURDF(robot_urdf, basePosition=[0, 0, 0], useFixedBase=True)
# urdf よりロボットの関節数を取得 (エンドエフェクタ用の仮想関節は不要なため -1)
self._n_joints = p.getNumJoints(self._robot_id) - 1
# ロボットの関節数に応じて,robot.py内のクラスを決定
if not (self._n_joints == DIMENTION_2D or self._n_joints == DIMENTION_3D):
# 2軸,3軸ロボットアーム以外
raise ValueError(f"self._n_joints is abnormal. {self._n_joints} is abnormal.")
def _init_environment(self):
"""
環境の初期化
"""
# 地面を読み込む (pybulletが提供している "plane.urdf" を読み込む)
p.loadURDF(self._PLANE_URDF)
def _init_sliders(self, interpolation):
"""
スライダーの初期化
パラメータ
interpolation(str): 補間方法 (関節空間/位置空間)
"""
sliders = []
# GUIにスライダーを追加
if interpolation == INTERPOLATION.JOINT.value: # 関節空間を探索
# 設定できる関節の最小値と最大値を取得
min_joints, max_joints = self._get_joint_limit()
# 初期角度を取得
init_thetas = self._get_init_thetas()
# 設定できる関節の最小値・最大値・初期値を設定
for joint_idx, (min_joint, max_joint, init_theta) in enumerate(zip(min_joints, max_joints, init_thetas)):
# 関節情報を取得して,スライダーの追加
slider = p.addUserDebugParameter(f"joiint {joint_idx + 1}", min_joint, max_joint, init_theta)
sliders.append(slider)
else:
# 異常
raise ValueError(f"interpolation is abnormal. interpolation is {interpolation}")
# プロパティの更新
self._interpolation = interpolation
self._sliders = sliders
def _get_joint_limit(self):
"""
関節の限界値 (最小値 + 最大値) を取得
戻り値
min_joints (list): 関節の最小値 [rad]
max_joints (list): 関節の最大値 [rad]
"""
min_joints = []
max_joints = []
# 全関節の最小値と最大値を取得
for i in range(self._n_joints):
# 関節に関する情報を取得
joint_info = p.getJointInfo(self._robot_id, i)
min_joint = joint_info[self._IDX_MIN_JOINT]
max_joint = joint_info[self._IDX_MAX_JOINT]
# 最小値と最大値をリストに保存
min_joints.append(min_joint)
max_joints.append(max_joint)
return min_joints, max_joints
def _get_init_thetas(self):
"""
初期角度を取得
戻り値
init_thetas(numpy.ndarray): 初期角度 [rad]
"""
init_thetas = np.ones(self._n_joints) * self._JOINT_INIT
return init_thetas
# 事前準備メソッド ↑
# メイン処理 ↓
def run(self):
"""
実行
スライダー内の関節角度を取得して,シミュレータ上のロボットを動かす
"""
# 文字列の出力ID
text_id = p.addUserDebugText("", textPosition=[0, 0, 0])
# リアルタイムでのシミュレーション
p.setRealTimeSimulation(1)
while True:
# スライダー内の値を取得
slider_values = self._get_slider_values()
# 関節角度を設定
self._set_joint(slider_values)
# 値をGUIに設定
self._set_text(text_id)
# 待機時間
time.sleep(self._SIMULATION_SLEEP_TIME)
def _get_slider_values(self):
"""
スライダー内の値を取得
戻り値
slider_values(numpy.ndarray): スライダー内の情報
"""
slider_values = []
for slider in self._sliders:
# スライダー1つずつ値を取得
slider_value = p.readUserDebugParameter(slider)
slider_values.append(slider_value)
return np.array(slider_values)
def _set_joint(self, thetas):
"""
関節角度の設定
パラメータ
thetas(numpy.ndarray): 設定したい関節角度
"""
for i in range(len(thetas)):
# 関節角度を設定
p.setJointMotorControl2(
bodyUniqueId=self._robot_id, # IDの設定
jointIndex=i, # 関節番号の設定
controlMode=p.POSITION_CONTROL, # 位置制御
targetPosition=thetas[i] # 関節角度
)
def _set_text(self, text_id):
"""
GUIにテキストを設定
パラメータ
text_id(): 設定したテキストID
"""
# エンドエフェクタの位置を取得
ee_pos = p.getLinkState(self._robot_id, self._n_joints)[0]
text = f"end effecter pos:\nx={ee_pos[0]:.2f}, y={ee_pos[1]:.2f}, z={ee_pos[2]:.2f}"
p.addUserDebugText(text, ee_pos, textColorRGB=[0, 0, 0], textSize=self._DEBUG_TEXT_SIZE, lifeTime=self._DEBUG_TEXT_LIFE_TIME, replaceItemUniqueId=text_id)
# メイン処理 ↑
上ソースコードは,2軸ロボットアームを動かした時と大方同じであるため,本記事では割愛する.
(前記事 https://qiita.com/haruhiro1020/items/ecc5215234350b663770)
PyBulletでロボットを動かす
上記にて,ロボットのURDF,ソースコードを説明した.
main.py ファイルを実施することによって,PyBullet上のロボットを動かしていく.
実際に動かした動画を下図に記載した.

スライダー内の関節角度を変更することで,シミュレータ上のロボットアームも動いていることがわかる.
今回は3軸ロボットアームであるが,他のロボットにも応用できそうだ.
おわりに
本記事では,Pythonを使用して,下記内容を実装しました
・PyBullet で使用する3軸ロボットアームのURDFの作成方法.
・PyBullet で3軸ロボットアームの関節角度をスライダーで設定することよって,ロボットを動かす
次記事では,下記内容を実装していきます.
・PyBullet で3軸ロボットアームの手先位置をスライダーで設定することよって,ロボットを動かす
(https://qiita.com/haruhiro1020/items/89ed03b9a63e2cb9b76b)