はじめに
私がロボットに関して興味を持っている.特にロボットの経路生成に興味がある.
前記事では,干渉物が存在する環境下で,2軸ロボットアームの経路生成を実装した.
(https://qiita.com/haruhiro1020/items/b42725df00e13ddcb5af)
本記事では,3軸ロボットアームの順運動学を説明する.
順運動学とは,関節角度から手先位置を計算することです.
手先位置を算出するために,三角関数(sin, cos, tan)を使用する.以下サイトはわかりやすいです.
・https://www.meikogijuku.jp/meiko-plus/study/trigonometric-function.html
本記事で実装すること
・3軸ロボットアームの順運動学
本記事では実装できないこと (将来実装したい内容)
・3軸ロボットアームの逆運動学 (逆運動学 ... ロボットの手先位置からロボットの関節角度を算出する)
・3軸ロボットアームに経路生成RRT を組み合わせる
動作環境
・macOS Sequoia (バージョン15.5)
・Python3 (3.10.9)
・Numpy (1.23.5) (数値計算用ライブラリ)
・Matplotlib (3.7.0) (アニメーション作成用ライブラリ)
順運動学
順運動学について説明する.
今回は下図のような3軸ロボットアームを考える.
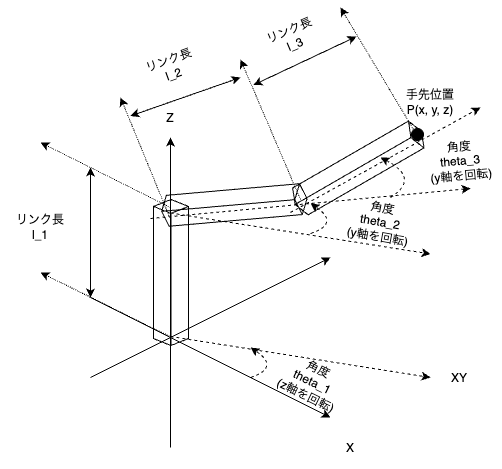
$l_{1}$はリンク1の長さ[m],$l_{2}$はリンク2の長さ[m],$l_{3}$はリンク3の長さ[m]です.
$\theta_{1}$は関節1の角度[rad]であり,z軸方向に回転する.
$\theta_{2}$は関節2の角度[rad]であり,y軸方向に回転する.
$\theta_{3}$は関節3の角度[rad]であり,y軸方向に回転する.
手先位置$P(x, y, z)$を各関節角度($\theta_{1}$,$\theta_{2}$, $\theta_{3}$)から計算する.
上図を一度下図のようにして考えてみる.(XY軸とZ軸を平面で表す)

はじめにリンク2の先端位置P2を計算する.
P2($xy_{2}, z_{2}$)は三角関数を使用することで,以下となる.
\displaylines{
xy_{2} = l_{2} * \cos\theta_{2} \\
z_{2} = l_{1} + l_{2} * \sin\theta_{2} \\
}
次に手先位置Pを計算する.
P($xy, z$)は三角関数とP2($xy_{2}, z_{2}$)を使用することで,以下となる.
\displaylines{
xy = l_{2} * \cos\theta_{2} + l_{3} * \cos(\theta_{2} + \theta_{3}) \\
z = l_{1} + l_{2} * \sin\theta_{2} + l_{3} * \sin(\theta_{2} + \theta_{3}) \\
}
次に,XY軸をX軸とY軸の平面で記載すると下図のようになる.

先ほどXY軸の位置を算出できたため,XY軸をX軸とY軸に分解することで,XとYを算出することが可能となる.
XとYは以下のように求まる.
\displaylines{
xy = l_{2} * \cos\theta_{2} + l_{3} * \cos(\theta_{2} + \theta_{3}) \\
x = \cos\theta_{1} * xy = \cos\theta_{1} * (l_{2} * \cos\theta_{2} + l_{3} * \cos(\theta_{2} + \theta_{3}) ) \\
y = \sin\theta_{1} * xy = \sin\theta_{1} * (l_{2} * \cos\theta_{2} + l_{3} * \cos(\theta_{2} + \theta_{3}) ) \\
}
順運動学によるロボットの手先位置
上記よりロボットの手先位置$P (x, y, z)$を計算したため,下記にまとめる.
\displaylines{
x = \cos\theta_{1} * (l_{2} * \cos\theta_{2} + l_{3} * \cos(\theta_{2} + \theta_{3}) ) \\
y = \sin\theta_{1} * (l_{2} * \cos\theta_{2} + l_{3} * \cos(\theta_{2} + \theta_{3}) ) \\
z = l_{1} + l_{2} * \sin\theta_{2} + l_{3} * \sin(\theta_{2} + \theta_{3}) \\
}
順運動学のソースコード
定数を定義するファイル (constant.py)
定数を定義するファイルを下記に記す.
# 複数ファイルで使用する定数の定義
# 次元数を定義
DIMENTION_NONE = -1 # 未定義
DIMENTION_2D = 2 # 2次元
DIMENTION_3D = 3 # 3次元
# 回転軸
ROTATION_X_AXIS = "rot_x" # x軸周りに回転
ROTATION_Y_AXIS = "rot_y" # y軸周りに回転
ROTATION_Z_AXIS = "rot_z" # z軸周りに回転
3軸ロボットアームを定義するファイル (robot.py)
3軸ロボットアームを定義するファイルを下記に記す.
# ロボットアームの運動学を記載
# ライブラリの読み込み
import numpy as np
# 自作モジュールの読み込み
from constant import * # 定数
from rotation import Rotation # 回転行列
class Robot:
"""
ロボットのベースクラス(抽象クラス)
プロパティ
_links(numpy.ndarray): ロボットのリンク長 [m]
_rot(Rotation): 回転行列クラス
_objects(list): 干渉物オブジェクト
_manager(fcl.DynamicAABBTreeCollisionManager): 干渉判定クラス
メソッド
public
forward_kinematics(): 順運動学 (ロボットの関節角度からロボットの手先位置を算出)
inverse_kinematics(): 逆運動学 (ロボットの手先位置からロボットの関節角度を算出)
forward_kinematics_all_pos(): 順運動学で全リンクの位置を取得
update(): 角度を与えて,各リンクの直方体を更新する
links(): _linksプロパティのゲッター
manager(): _managerプロパティのゲッター
"""
# 定数の定義
_DIMENTION_POSE = DIMENTION_NONE # 手先位置の次元数
_DIMENTION_THETA = DIMENTION_NONE # 関節角度の次元数
_DIMENTION_LINK = DIMENTION_NONE # リンク数
_DIMENTION_AXIS = DIMENTION_NONE # 回転軸数
_INITIAL_THETA = 0.0 # 初期回転角度 [rad]
def __init__(self, links):
"""
コンストラクタ
パラメータ
links(numpy.ndarray): ロボットのリンク長 [m]
"""
if np.size(links) != self._DIMENTION_LINK:
# 異常
raise ValueError(f"links's size is abnormal. correct is {self._DIMENTION_Link}")
# プロパティの初期化
self._links = links
self._rot = Rotation()
self._objects = []
self._manager = None
@property
def links(self):
"""
_linksプロパティのゲッター
"""
return self._links
@property
def manager(self):
"""
_managerプロパティのゲッター
"""
return self._manager
def forward_kinematics(self, thetas):
"""
順運動学 (ロボットの関節角度からロボットの手先位置を算出)
パラメータ
thetas(numpy.ndarray): ロボットの関節角度 [rad]
戻り値
pose(numpy.ndarray): ロボットの手先位置 (位置 + 姿勢) [m] + [rad]
"""
raise NotImplementedError("forward_kinematics() is necessary override.")
def inverse_kinematics(self, pose):
"""
逆運動学 (ロボットの手先位置からロボットの関節角度を算出)
パラメータ
pose(numpy.ndarray): ロボットの手先位置 (位置 + 姿勢) [m] + [rad]
戻り値
thetas(numpy.ndarray): ロボットの関節角度 [rad]
"""
raise NotImplementedError("inverse_kinematics() is necessary override.")
def forward_kinematics_all_pos(self, thetas):
"""
順運動学で全リンクの位置を取得
パラメータ
thetas(numpy.ndarray): ロボットの関節角度 [rad]
戻り値
all_pose(numpy.ndarray): ロボットの全リンク位置 (位置 + 姿勢) [m] + [rad]
"""
raise NotImplementedError("forward_kinematics() is necessary override.")
def update(self, thetas):
"""
角度を与えて,各リンクの直方体を更新する
パラメータ
thetas(numpy.ndarray): ロボットの関節角度 [rad]
"""
raise NotImplementedError("update() is necessary override.")
class Robot3DoF(Robot):
"""
2軸ロボットクラス
プロパティ
_links(numpy.ndarray): ロボットのリンク長
_rot(Rotation): 回転行列クラス
_axiss(list): 関節の回転軸
メソッド
public
forward_kinematics(): 順運動学 (ロボットの関節角度からロボットの手先位置を算出)
inverse_kinematics(): 逆運動学 (ロボットの手先位置からロボットの関節角度を算出)
forward_kinematics_all_pos(): 順運動学で全リンクの位置を取得
update(): 角度を与えて,各リンクの直方体を更新する
"""
# 定数の定義
_DIMENTION_POSE = DIMENTION_3D # 手先位置の次元数
_DIMENTION_THETA = DIMENTION_3D # 関節角度の次元数
_DIMENTION_LINK = DIMENTION_3D # リンク数
def __init__(self, links):
"""
コンストラクタ
パラメータ
links(numpy.ndarray): ロボットのリンク長 [m]
"""
# 親クラスの初期化
super().__init__(links)
def forward_kinematics(self, thetas):
"""
順運動学 (ロボットの関節角度からロボットの手先位置を算出)
パラメータ
thetas(numpy.ndarray): ロボットの関節角度 [rad]
戻り値
pose(numpy.ndarray): ロボットの手先位置 (位置) [m]
"""
# パラメータの次元数を確認
if np.size(thetas) != self._DIMENTION_THETA:
raise ValueError(f"thetas's size is abnormal. thetas's size is {np.size(thetas)}")
# あらかじめ三角関数を算出する
sin1 = np.sin(thetas[0])
sin2 = np.sin(thetas[1])
sin23 = np.sin(thetas[1] + thetas[2])
cos1 = np.cos(thetas[0])
cos2 = np.cos(thetas[1])
cos23 = np.cos(thetas[1] + thetas[2])
# ロボットの手先位置を算出
pxy_common = self._links[1] * cos2 + self._links[2] * cos23
px = cos1 * pxy_common
py = sin1 * pxy_common
pz = self._links[0] + self._links[1] * sin2 + self._links[2] * sin23
pose = np.array([px, py, pz])
return pose
def forward_kinematics_all_link_pos(self, thetas):
"""
順運動学で全リンクの位置を取得 (グラフの描画で使用する)
パラメータ
thetas(numpy.ndarray): ロボットの関節角度 [rad]
戻り値
all_link_pose(numpy.ndarray): ロボットの全リンク位置 (位置 + 姿勢) [m] + [rad]
"""
# パラメータの次元数を確認
if np.size(thetas) != self._DIMENTION_THETA:
raise ValueError(f"thetas's size is abnormal. thetas's size is {np.size(thetas)}")
# 回転角度とリンク長をローカル変数に保存
theta1 = thetas[0]
theta2 = thetas[1]
theta3 = thetas[2]
link1 = self._links[0]
link2 = self._links[1]
link3 = self._links[2]
# 三角関数を計算
s1 = np.sin(theta1)
c1 = np.cos(theta1)
s2 = np.sin(theta2)
c2 = np.cos(theta2)
s3 = np.sin(theta3)
c3 = np.cos(theta3)
s12 = np.sin(theta1 + theta2)
c12 = np.cos(theta1 + theta2)
s23 = np.sin(theta2 + theta3)
c23 = np.cos(theta2 + theta3)
# 各リンクの位置を算出
base_pos = np.zeros(self._DIMENTION_POSE)
link1_pos = np.array([0, 0, link1])
link2_xy_common = link2 * c2
link2_pos = np.array([c1 * link2_xy_common, s1 * link2_xy_common, link1 + link2 * s2])
link3_xy_common = link2 * c2 + link3 * c23
link3_pos = np.array([c1 * link3_xy_common, s1 * link3_xy_common, link1 + link2 * s2 + link3 * s23])
# 全リンクの位置を算出
all_link_pose = np.array([base_pos, link1_pos, link2_pos, link3_pos])
return all_link_pose
メイン(プロットなど)処理 (main.py)
メイン処理ファイルを下記に記す.
# メイン処理
# ライブラリの読み込み
import numpy as np # 数値計算
import matplotlib.pyplot as plt # 描画
# 自作モジュールの読み込み
from constant import * # 定数
from robot import Robot3DoF # ロボットクラス
LINE_WIDTH = 3 # プロット時の線の太さ
GRAPH_FILE_NAME = "plot_3drob_forward_kinematics.png"
def main():
"""
メイン処理
"""
# 3軸ロボットのリンク長
links = np.array([1.0, 1.0, 1.0])
# 3軸ロボットのインスタンスを作成
robot = Robot3DoF(links)
# 関節角度 [deg] を定義
deg_thetas = [0, 30, 60]
# [deg]から[rad]へ変換
candidate = np.deg2rad(deg_thetas)
all_thetas = np.array([[theta1, theta2, theta3] for theta1 in candidate for theta2 in candidate for theta3 in candidate])
# 3次元グラフの作成
fig = plt.figure()
axis = fig.add_subplot(111, projection="3d")
# 順運動学により,位置を算出
for thetas in all_thetas:
plot(robot, thetas, axis)
# X軸,Y軸,Z軸の名称
axis.set_xlabel("X [m]")
axis.set_ylabel("Y [m]")
axis.set_zlabel("Z [m]")
axis.grid()
axis.set_aspect("equal")
plt.legend(fontsize=5, loc='center left', bbox_to_anchor=(0.8, .5))
# # 凡例を見切れないようにするために,plt.tight_layout()
plt.tight_layout()
plt.savefig(GRAPH_FILE_NAME)
plt.show()
def plot(robot, thetas, axis, label=True):
"""
ロボットをプロット (将来的にはクラス化する)
パラメータ
robot(Robot3DoF): ロボット
thetas(numpy.ndarray): 回転角度
axis(figure.add_subplot): 3次元の描画軸
label(bool): 描画時のラベルの有無
"""
# 全リンクの位置を算出
all_link_pos = robot.forward_kinematics_all_link_pos(thetas)
# 線プロット
if label:
axis.plot(all_link_pos[:, 0], all_link_pos[:, 1], all_link_pos[:, 2], linewidth=LINE_WIDTH, label=f"theta1={np.rad2deg(thetas[0]):.1f} [deg], theta2={np.rad2deg(thetas[1]):.1f} [deg], theta3={np.rad2deg(thetas[2]):.1f} [deg]")
else:
axis.plot(all_link_pos[:, 0], all_link_pos[:, 1], all_link_pos[:, 2], linewidth=LINE_WIDTH)
# 点プロット
axis.scatter(all_link_pos[:, 0], all_link_pos[:, 1], all_link_pos[:, 2])
if __name__ == "__main__":
# 本ファイルがメインで呼ばれた時の処理
main()
処理結果
main.pyを実行し,順運動学が正しいかのグラフは下図である.

左下に判例を記載してある.グラフを見る限り,順運動学の処理は正常であることがわかる.
おわりに
本記事では,Pythonを使用して,下記内容を実装しました.
・3軸ロボットアームの順運動学 (順運動学 ... ロボットの関節角度からロボットの手先位置を算出する)
次記事では,下記内容を実装していきます.
・3軸ロボットアームの逆運動学 (逆運動学 ... ロボットの手先位置からロボットの関節角度を算出する)
(https://qiita.com/haruhiro1020/items/3d72eddc3f623eee963a)