概要
RobStride Dynamics社製のRobStrideシリーズのテストツールであるMotorStudio v0.0.8の使い方を残しておきます。
Robstrideの前身であるCybergearもほぼ同様のCANプロトコルで動作するので、MotorStudioで動作させることができると思います。
MotorStudio v0.0.8とは?
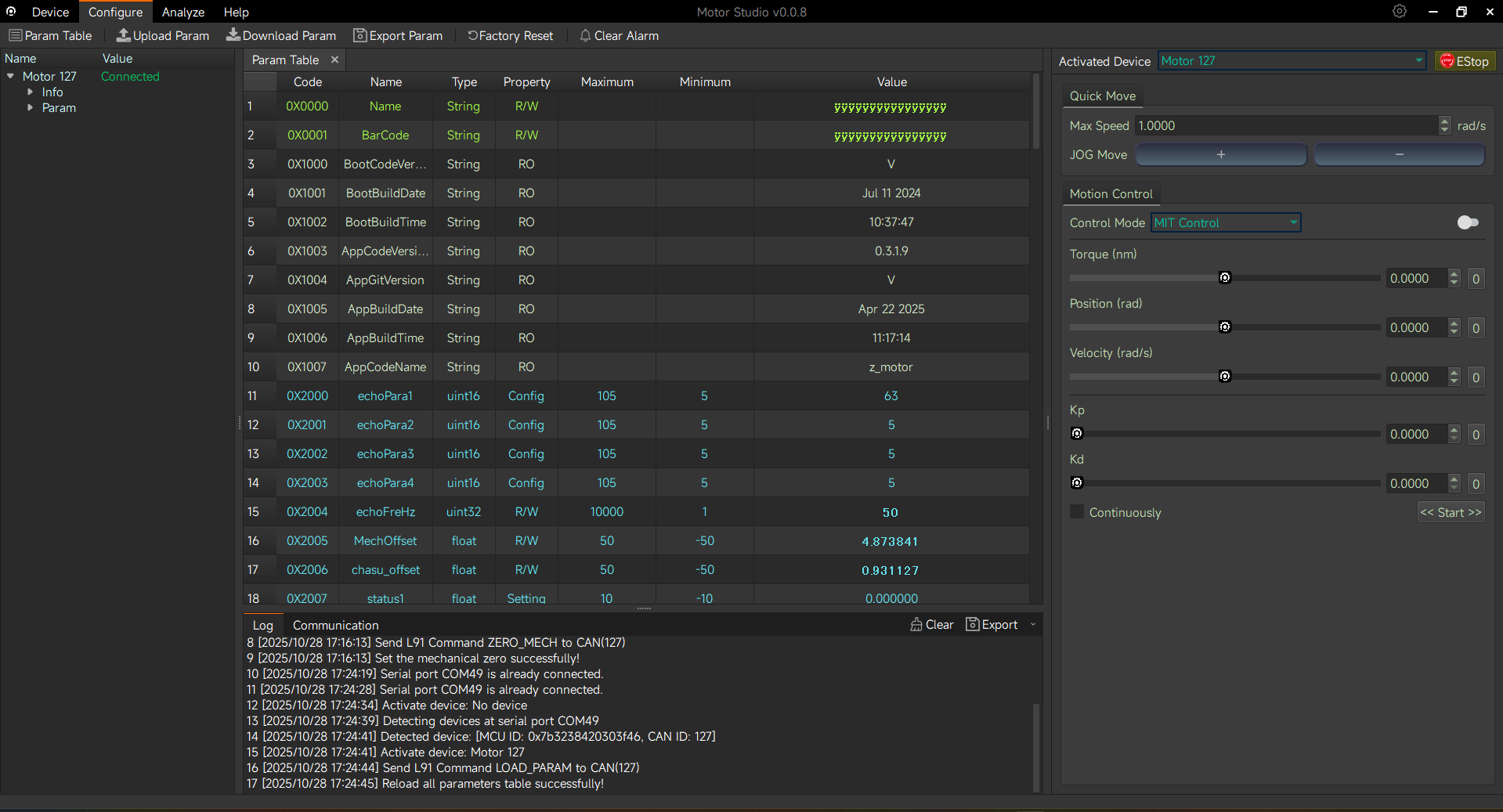
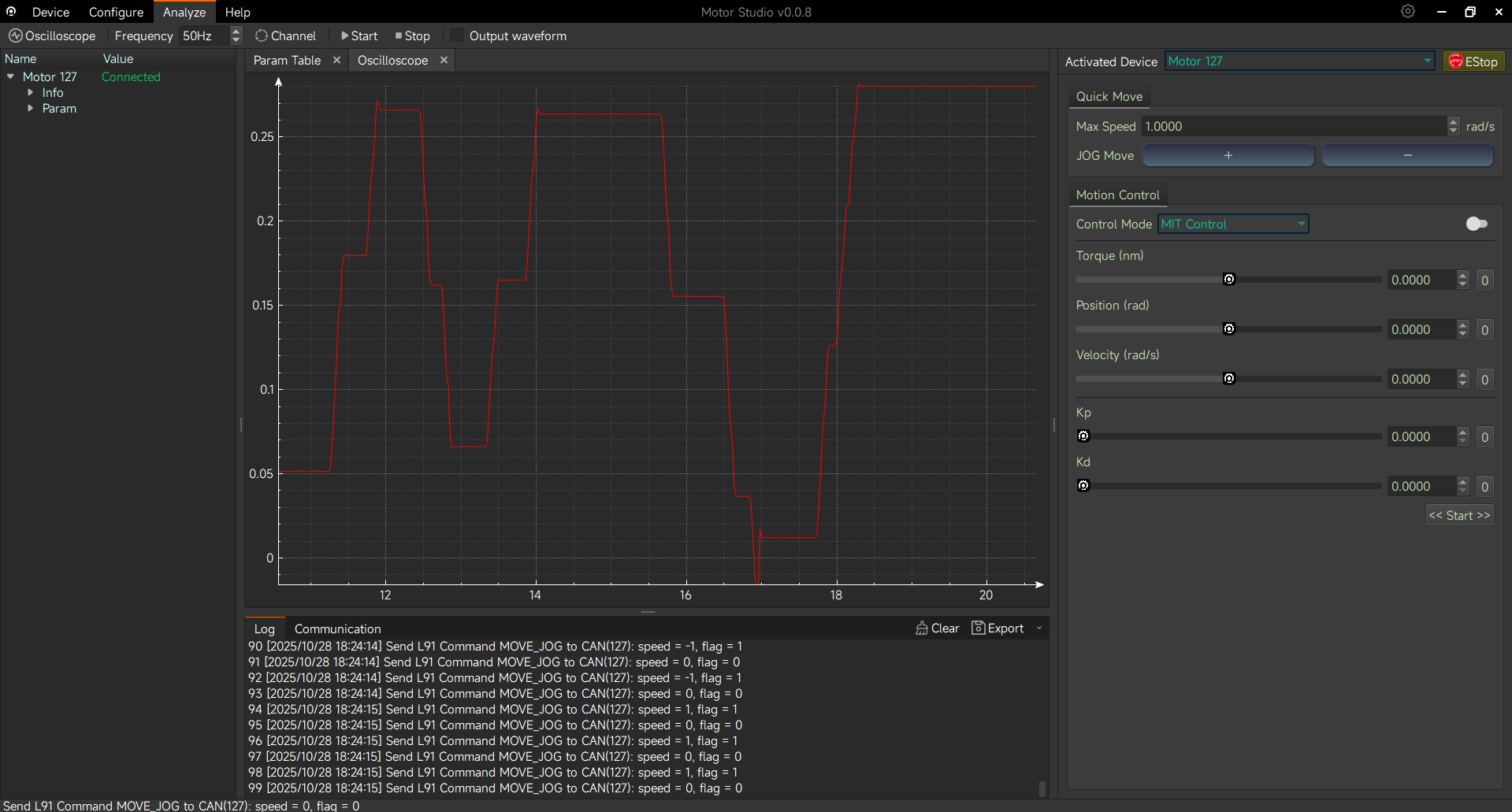
まず、MotorSdutioとは何かを簡単に書きます。これはWin11上で動作するRobstride製のモータをテストするためのテストツールです。以下のようなGUIでボタンをポチポチするだけで、速度制御、位置制御、パラメータの設定などを色々試すことができます。
Robstride製のモータを使ってロボットなどを開発する時に便利なツールです。
用意するもの
用意するものは以下です。
- Win11のPC
- MotorStudio v0.0.8
- USB-CAN変換 (CH340を使ったUSB-CAN変換)
こういうやつ (Color: USB to CAN Module)
MotorStudioのダウンロード方法
Robstride DynamicsのGitHubから、MotorStudio->Tags->V0.0.8と移動して、motorstudio0.0.8.zipをダウンロードしてください。
ダウンロードしたら、zipファイルを適当な場所に解凍してください。
CH340ドライバのインストール
MotorStudio v0.0.8のzipを解凍するとCH340用のドライバインストーラが入っています。CH340のドライバがない人は、driver.exeでインストールしておいてください。
MotorStudioの言語設定
言語設定はconfig.xmlというファイルの中を少し書き換えると変更できます。
ただし、日本語はなさそうです。デフォルトは中国語なので、英語の方が読めるという人は英語にしましょう。
英語に変更するときは、以下の内容を
<c name="language" type="10" value="zh_CN"/>
以下のように、変更してください。
<c name="language" type="10" value="zh_EN"/>
MotorStudioとRobstrideの接続
MotorStudioとRobstrideの接続は以下の手順で行います。
-
USB-CAN変換のH・L・GND、電源をRobstrideに接続する
-
motorstudio.exeでMotorStudioを起動する -
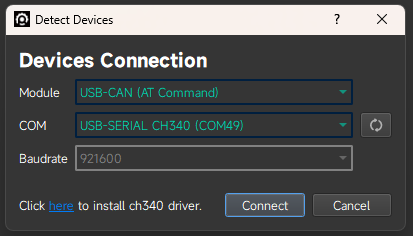
左上のConnectをクリックして、USB-CAN変換と接続する
-
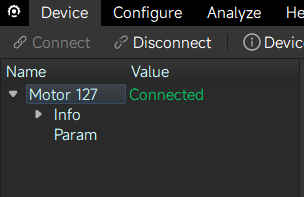
Robstrideが正常に認識されれば、以下のようにCAN-IDなどが表示される
とりあえず、モータを回転させる
接続できたら、JOG Moveを押せば簡単にRobstrideを回せます。
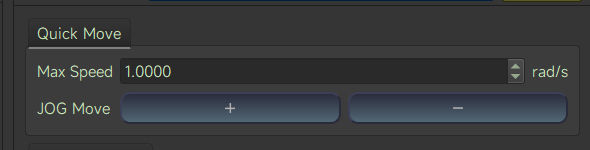
これはボタンを長押し中は回り続け、離すと止まる動作をします。
Max Speedを変更すれば、最大速度を変えることもできます。
とりあえず回したいだけなら、これだけで十分です。
現在設定されているパラメータを見る
現在Robstrideに設置されているパラメータの一覧を見ることができます。
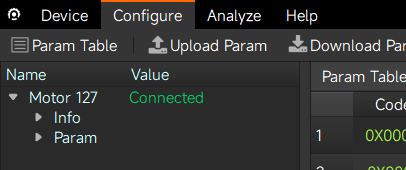
左上のタブからConfigureを選び、Param Tableを選択します。
Robstrideからパラメータを取得するには、Upload Param、パラメータを送信するには、Download Paramを押します。自分の感覚的にはUploadとDownloadが逆だったので、間違えないように注意してください。
各パラメータは書き換えることができるものもあるので、それを書き換えてからDownload Paramを押せばRobstride側のパラメータを書き換えることができます。
工場出荷状態に戻す
色々いじっているとRobstrideの挙動がおかしくなる場合があります。これはRobstrideに変なパラメータを書き込んだ可能性が高いので、工場出荷状態に戻すのが良いです。
タブからConfigureを押して、Factory Resetを押すと工場出荷状態に戻すことができます。
位置制御のゼロ位置設定
Robstrideは位置制御におけるゼロ位置の場所を任意の場所に設定できます。
タブのDeviceを押して、Reset Zero Positionを押すと、Robstrideの現在位置がゼロ位置に設定されます。
Robstrideにはいくつか種類があり、Dual Encoderが搭載されている製品でないと、電源OFF時にゼロ位置を忘れるので注意が必要です。
グラフ機能
Robstrideの各パラメータをグラフに表示する機能があります。例えば、以下のようにRobstrideの角度をグラフに表示することができます。
設定の方法は以下です。
-
タブの
Analyzeを押す -
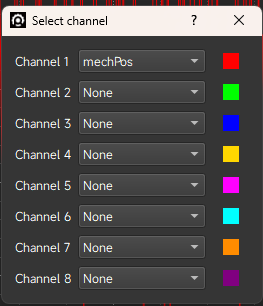
Channelから表示したいパラメータを選ぶ。選んだら、バツで閉じる
(角度なら、mechPos)
-
Startを押す -
止めたい場合は、
Stopを押す
送信しているCANパケットの解析
MotorStudioがRobstrideへ送信しているCANパケットの内容を見ることができます。
以下のDropBoxからエクセルをダウンロードして、パケットを張り付けると以下のように内容が解析されます。

まとめ
今回はMotorStudioの基本的な使い方を紹介しました。この記事が誰かの役に立てば幸いです。
何かご質問や指摘などありましたら、コメントいただければと思います。