このようなモデルで制御系を設計します。
実際のハードウェアとしては、3軸のNCフライス盤を想定しています。
今時の流行りだと3Dプリンタなのかもしれません。
直交3軸の機械の1軸分だと思ってください。
なぜ3慣性モデルか
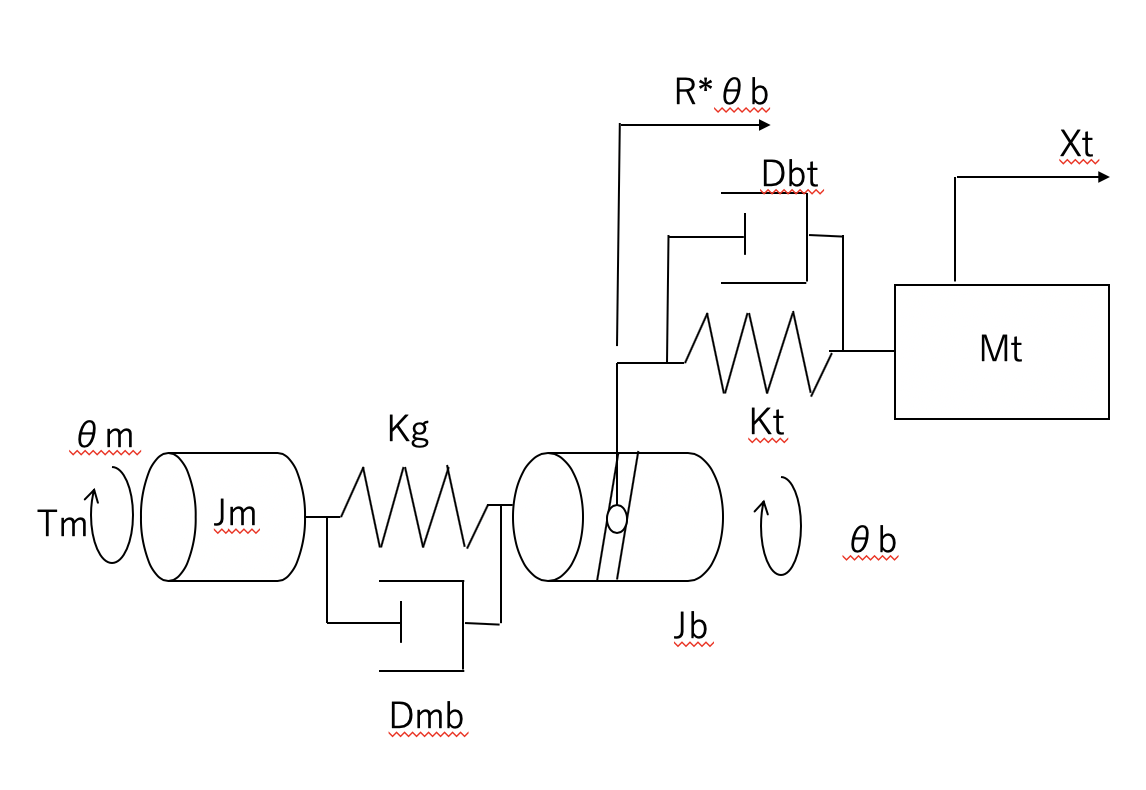
モータ、ボールネジ、直動部の3慣性でモデル化しました。
モータからツールのある手先までをモデル化する場合、ボールネジから直動部まで剛体締結として1つの慣性でモデル化する場合もあるのですが、今回は2つの理由から3慣性にしました。
1つはリニアエンコーダの取り付け位置をボールネジの位置に設定するためです。HDDのモータなんかだと、一番先端のヘッドが位置センサも兼ねているので、フルクローズドフィードバックが可能ですが、工作機械の場合はエンコーダから先端の手先までが長く、セミクローズドフィードバックで設計する必要があるためです。
もう1つはさらに上に乗っかる軸を想定しました。NCフライス盤は3軸がシリアルにY軸の上にX軸、その上にZ軸が乗っかるので、上の軸が乗っかっているイメージです。
定義
Tm:モータのトルク[Nm]
Jm:モータの慣性モーメント[kgm^2]
θm:モータの回転角[rad]
Dmb:モータとボールネジの間の粘性摩擦[Nms/rad]
Kg:ボールネジとモータの間のねじり剛性:[Nm/rad]
Jb:ボールネジの慣性モーメント[kgm^2]
θb:ボールネジの回転角[rad]
Dbt:ボールネジと直動部の粘性摩擦[Nms/rad]
Kt:ボールネジと直動部の間の剛性:[N/m]
Mt:直動部の質量[kg]
xt:直動部の移動量[rad]
目的
今回作ったモデルはモータトルクTmを生成して、直動部の移動量xtを制御することになります。
モータトルクの前には工作機械の移動パターンが定義されていて、時系列で移動パターンが渡されて、それに合わせてxtが動くような制御系を通してモータトルクTmが出力されます。
制限
フィードバックに使える信号を決めます。
xtが使えれば一番楽なのですが、xtには工具などが鎮座してますので、xtは観測できません。
- モータにはロータリーエンコーダが付いているのでθmが観測できます。
- ボールネジの回転角θbはリニアエンコーダで観測できます。(R*θbが観測可能)
まとめ
今回は直交3軸の機械の3慣性モデルの定義を行いました。
次回は今回定義した力学モデルについて説明していきます。