こんにちは、本日は自動航行船ロボコンのMaritime RobotX Challengeの公式シミュレータのセットアップ方法についてメモしておきたいとおもいます。
まず、リポジトリのURLはこちらです。
また本記事はこちらのチュートリアルを参考にしてください。
動作環境
PCスペック
CPU:Intel Core i7 4770K
Memory:32GB
GPU:GTX1060
OS等
OS:Ubuntu 16.04 LTS
ROS:Kinetic
Gazebo: Ver.7.0.0
依存関係のダウンロード等
以下のコマンドを実行してください。
(path_to_ros_workspace)にはソースコードを置きたいROSのワークスペースへのパスが入ります。
install_dependencies.sh
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt update
sudo apt install mercurial cmake pkg-config python python-pip git gazebo7 libgazebo7-dev ros-kinetic-ros-base ros-kinetic-teleop-tools ros-kinetic-teleop-twist-keyboard ros-kinetic-gazebo-plugins ros-kinetic-gazebo-ros ros-kinetic-xacro ros-kinetic-joy libeigen3-dev wget
sudo pip install --upgrade pip
sudo pip install packaging
sudo pip install vcstools
sudo pip install appdirs
cd (path_to_ros_workspace)/src
hg clone https://bitbucket.org/osrf/vmrc
cd (path_to_ros_workspace)
catkin_make
ビルド中に起こったエラー
vmrc/robotx_gazebo/CMakeFiles/robotx_gazebo_generate_messages_java_gradle.dir/build.make:63: ターゲット 'vmrc/robotx_gazebo/java/robotx_gazebo/build.gradle' のレシピで失敗しました
make[2]: *** [vmrc/robotx_gazebo/java/robotx_gazebo/build.gradle] エラー 1
CMakeFiles/Makefile2:4866: ターゲット 'vmrc/robotx_gazebo/CMakeFiles/robotx_gazebo_generate_messages_java_gradle.dir/all' のレシピで失敗しました
make[1]: *** [vmrc/robotx_gazebo/CMakeFiles/robotx_gazebo_generate_messages_java_gradle.dir/all] エラー 2
make[1]: *** 未完了のジョブを待っています....
fatal error: robotx_gazebo/UsvDrive.h: そのようなファイルやディレクトリはありません
初回ビルド時には上の2つのエラーにであいました。
おそらくオリジナルメッセージのビルド周りだとおもうのでもう一度catkin_makeしてみたところビルドに成功しました。
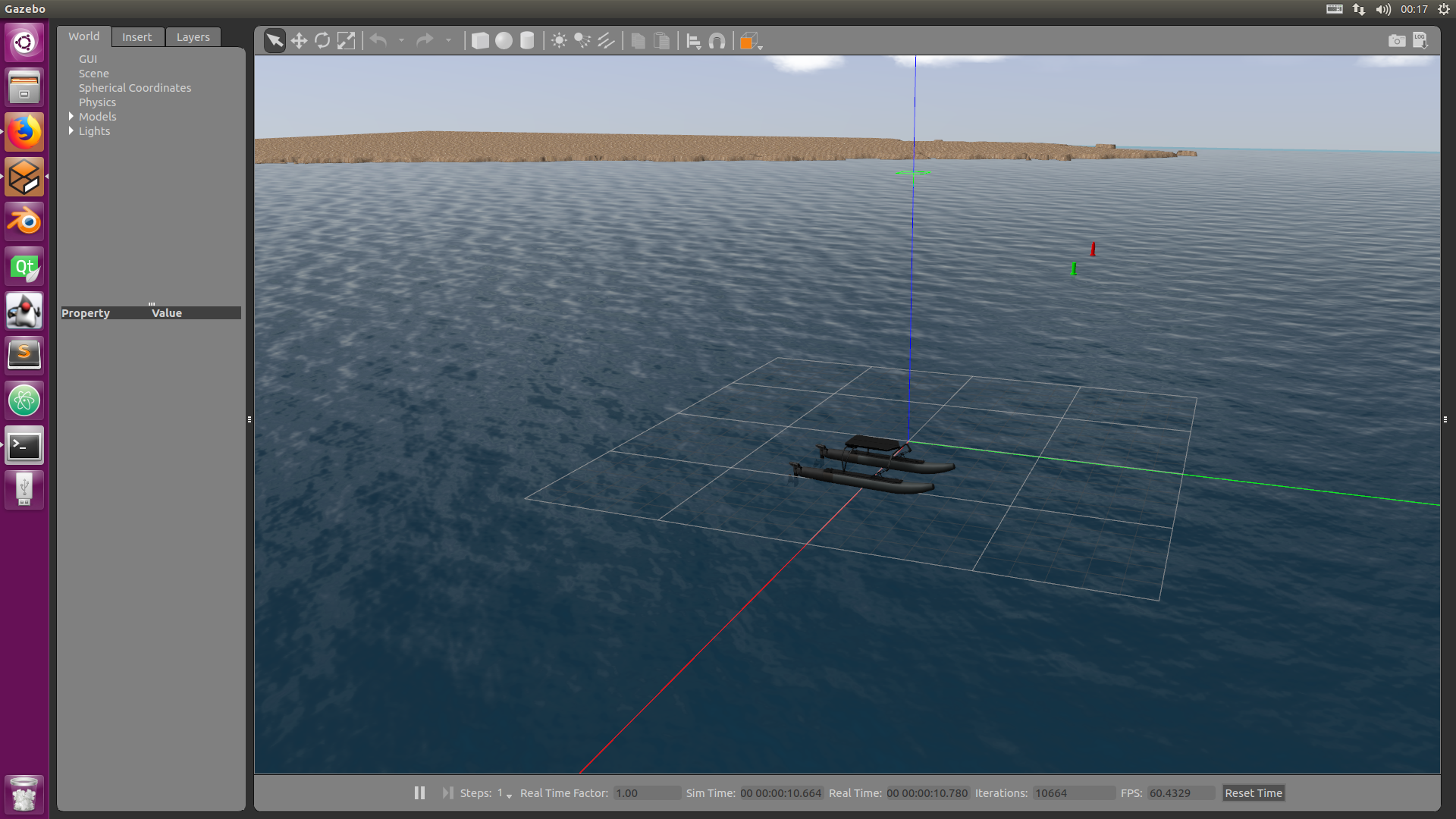
シミュレーション実行結果
roslaunch robotx_gazebo sandisland.launch