ハードウェアの準備
用意するもの
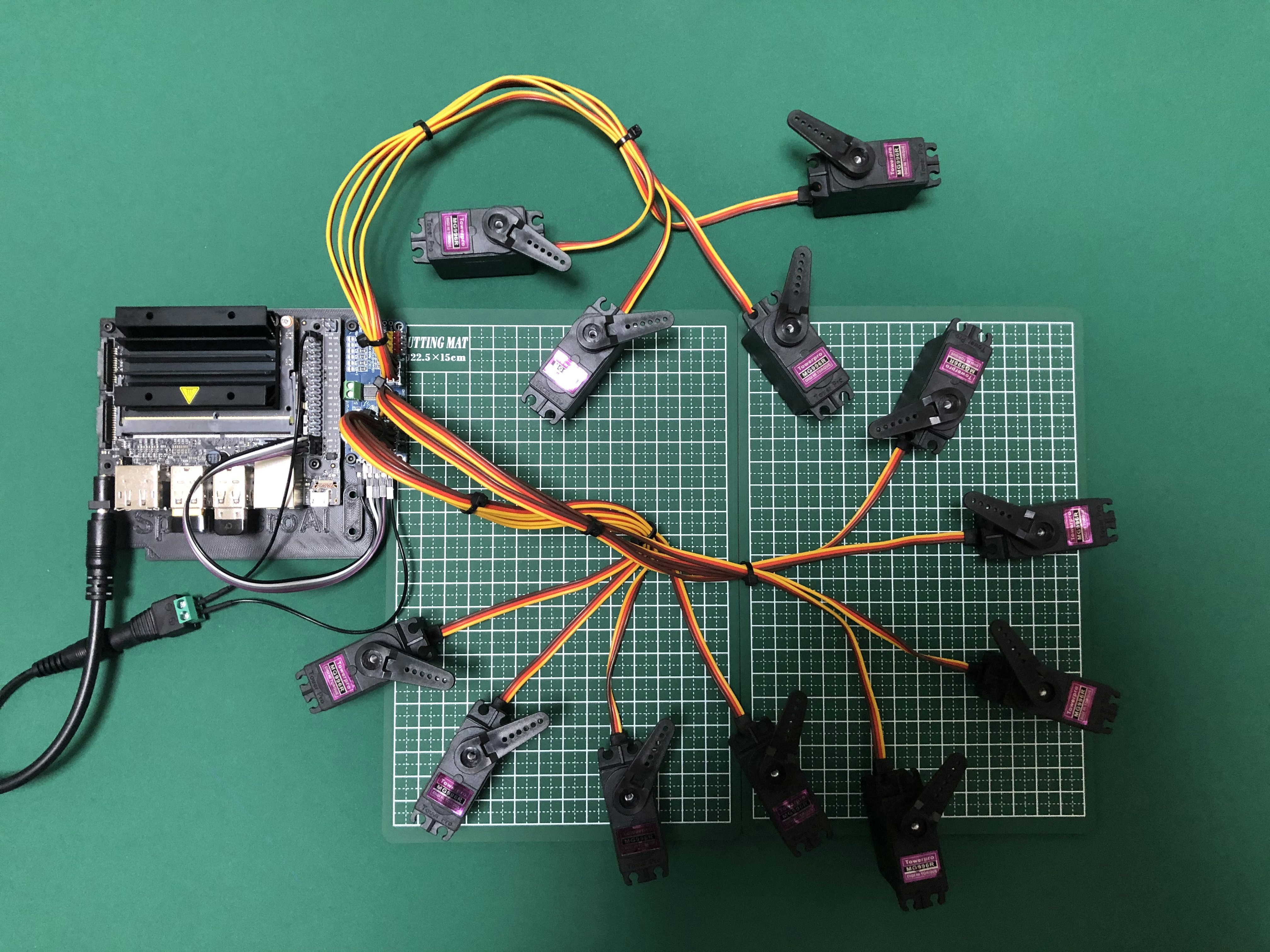
動かしたいサーボモータを複数用意します。
ここではMG996Rを12個動かすことを目標としますが、他のサーボモータや個数でも同様だと思います。
Jetson Nano単体では、せいぜい数個程度のサーボモータしか制御できません。
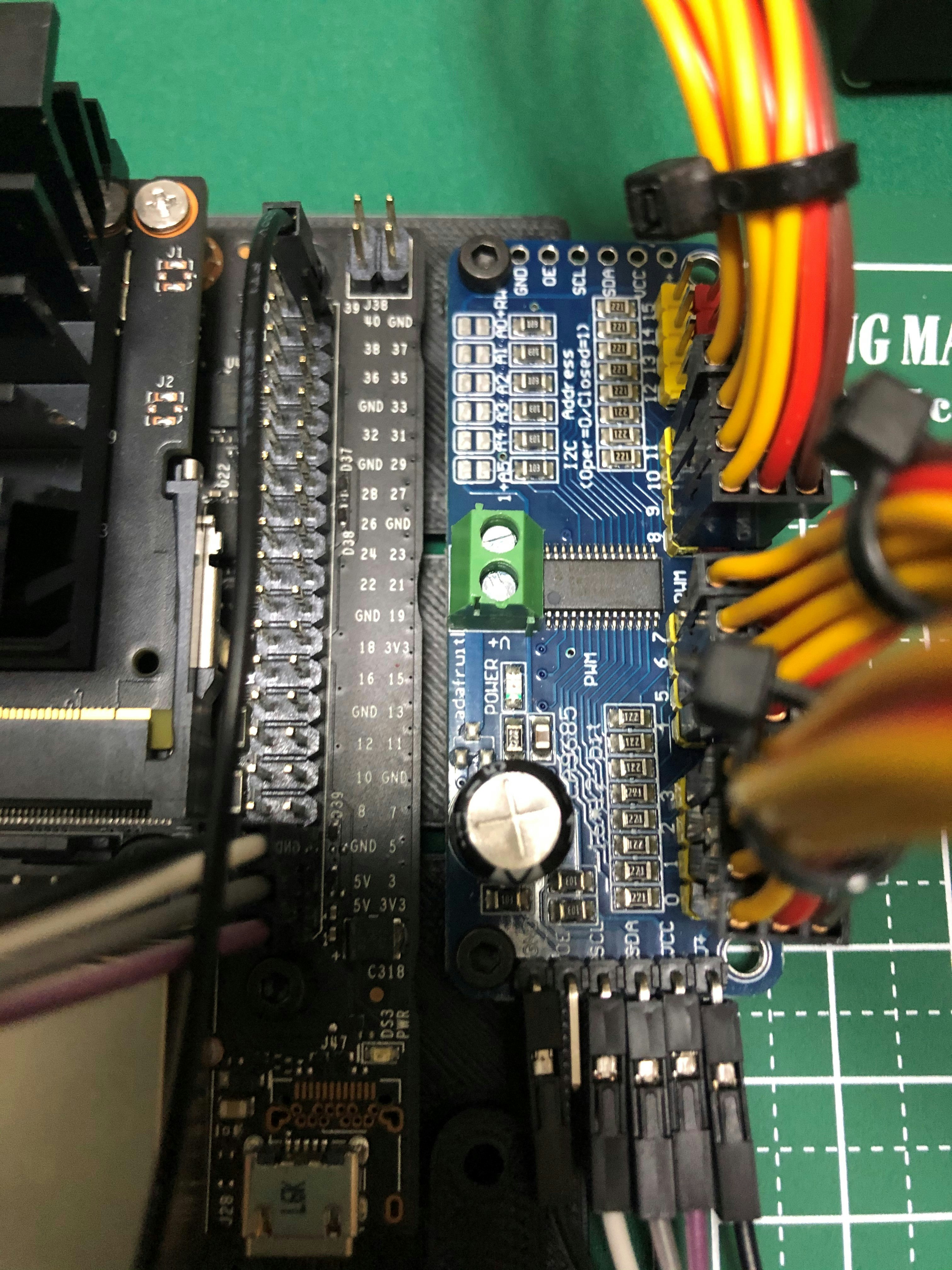
そのため、サーボドライバ PCA9685を使用します。
PCA9685は16チャンネルあるので、サーボモータを最大16個まで制御することができます。
ここでは12個のサーボモータを動かしたいので、1つあれば充分です。
| デバイス | 個数 | 説明 |
|---|---|---|
| Jetson Nano | 1 | |
| PCA9685 | 1 | サーボドライバ |
| MG996R | 12 | サーボモータ |
| ACアダプタ 5V-4A | 2 | Jetson NanoおよびPCA9685用の電源 |
| ジャンパワイヤ メスーメス | 4 | Jetson NanoとPCA9685を接続 |
回路図
Jetson NanoのGPIOピンのレイアウトは次のようになっています。
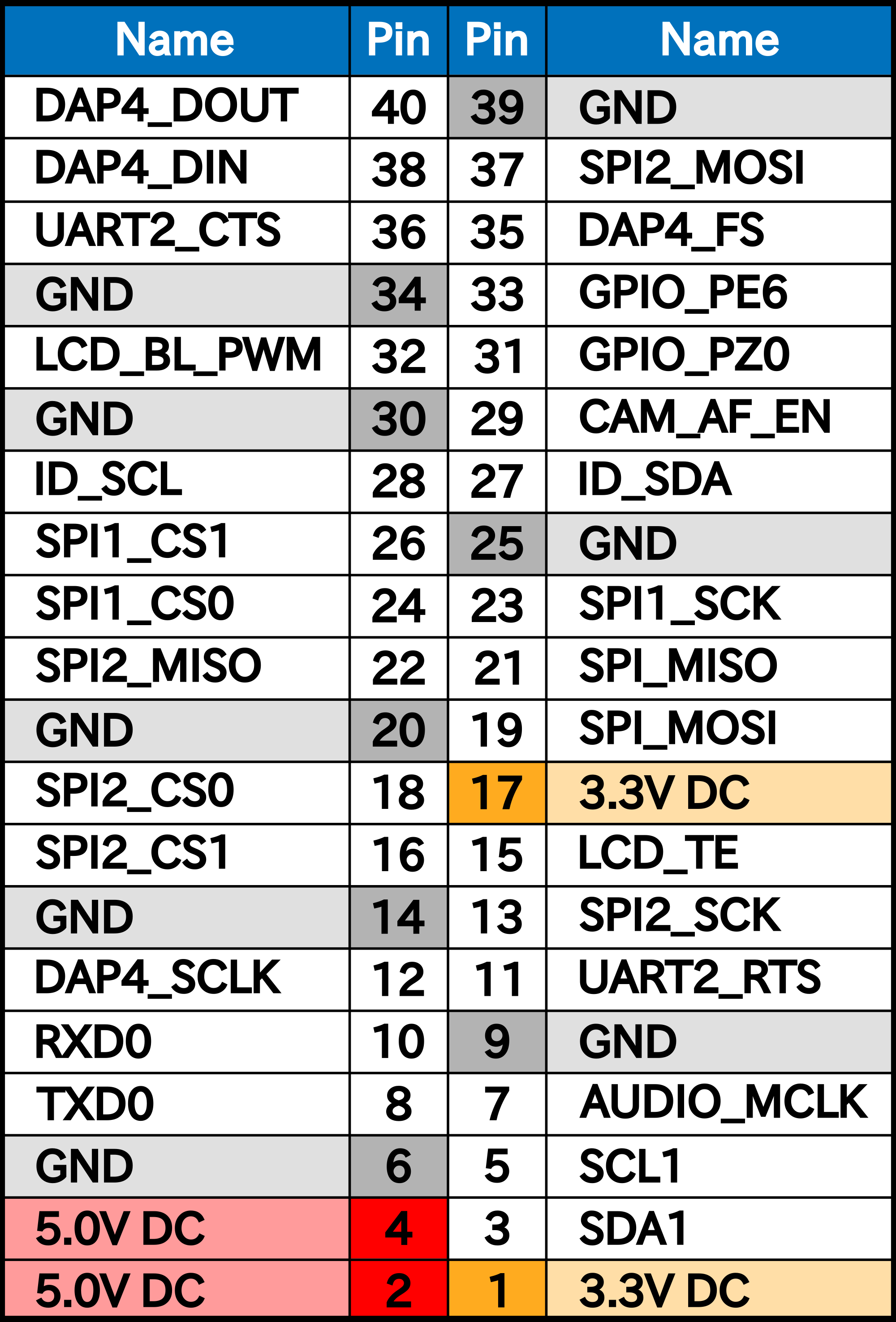
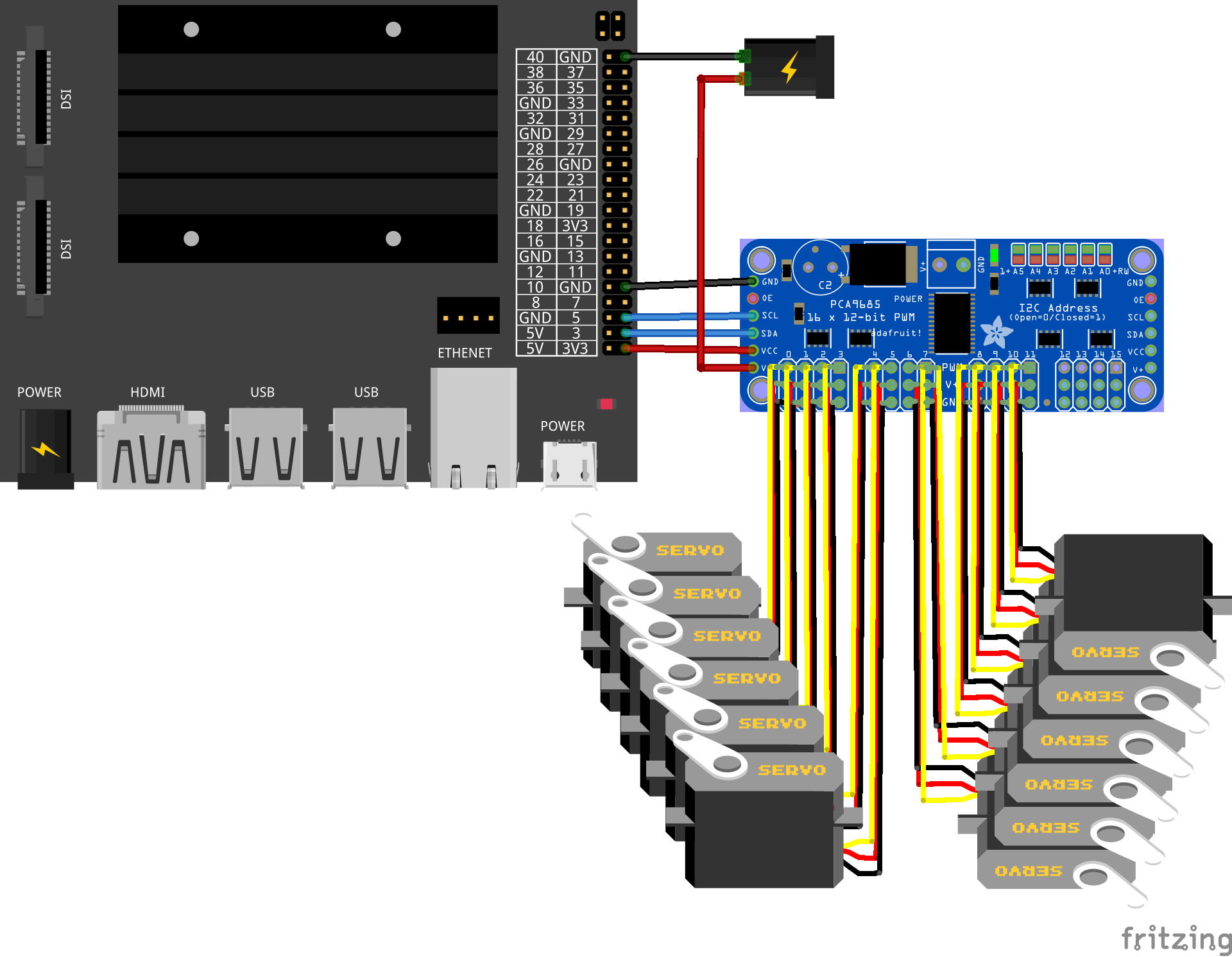
以下のように繋ぎます。
Jetson NanoとPCA9685の外部電源は、ともに5V 4Aを使用します。
| Jetson Nano GPIOピン番号 | <---> | PCA9685 |
|---|---|---|
| 1 | <---> | VCC |
| 3 | <---> | SDA |
| 5 | <---> | SCL |
| 9 | <---> | GND |
ソフトウェアの準備
ライブラリのインストール
こちらのサイトを参考に各種ライブラリをインストールしていきます。
接続確認
インストールが完了すれば、以下のコマンドで接続確認ができます。
$ sudo i2cdetect -y -r 1
正しく接続されていれば、次のような表示になるはずです。
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: 40 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: 70 -- -- -- -- -- -- --
モータ制御プログラム
joint_control.py
# !/usr/bin/python
# -*- coding: utf-8 -*-
import Adafruit_PCA9685
import time
# Initialise the PCA9685 using desired address and/or bus:
pwm = Adafruit_PCA9685.PCA9685(address = 0x40, busnum = 1)
# Number of servo
servo_num = 12
# Configure min and max servo pulse lengths
servo_min = 150 # min. pulse length
servo_max = 600 # max. pulse length
servo_offset = 50
# Set frequency to 60[Hz]
pwm.set_pwm_freq(60)
while True:
# Move servo on each channel
for i in range(servo_num):
print('Moving servo on channel: ', i)
pwm.set_pwm(i, 0, servo_min + servo_offset)
time.sleep(1)
for i in range(servo_num):
print('Moving servo on channel: ', i)
pwm.set_pwm(i, 0, servo_max - servo_offset)
time.sleep(1)
# Move servo on all channel
for i in range(servo_num):
print('Moving servo on channel: ', i)
pwm.set_pwm(i, 0, servo_min + servo_offset)
time.sleep(1)
for i in range(servo_num):
print('Moving servo on channel: ', i)
pwm.set_pwm(i, 0, servo_max - servo_offset)
time.sleep(1)
サーボを動かす
ここまで準備ができたらいざ動かしてみましょう!
実行権限を与えてから実行すればサーボが動くはずです。
$ chmod +x joint_control.py
$ python3 joint_control.py

おまけ
PCA9685の外部電源として、5V-4Aではなく5V-2Aを供給した場合の動作と外部電源の電圧が以下になります。
単体で動かす分には充分ですが、複数個動かす場合には電流が足りず、電圧が低下してしまうためうまく動いてくれません。
定格電流には注意しましょう。
