from IPython.display import HTML
HTML('''
<script>
code_show=true;
function code_toggle() {
if (code_show){
$(\'div.input\').hide();
} else {
$(\'div.input\').show();
}
code_show = !code_show
}
$( document ).ready(code_toggle);
</script>
<form action="javascript:code_toggle()">
<input type="submit" value="Toggle code">
</form>
''')
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import sklearn.gaussian_process as gp
%matplotlib inline
plt.rcParams['font.size']=15
def plt_legend_out(frameon=True):
plt.legend(bbox_to_anchor=(1.05, 1), loc='upper left', borderaxespad=0, frameon=frameon)
線形回帰
カーネル関数
$k(x,x')=xx'+\sigma^2I\ \ \ [x=x']$
# カーネル関数 k(x,x') を定義
def GPk(xv,zv,sd=1):
return(np.outer(xv,zv) + sd**2 * np.equal.outer(xv,zv))
n, sd = 30, 0.5; # 設定
theta = 1 # 回帰係数
# データ生成
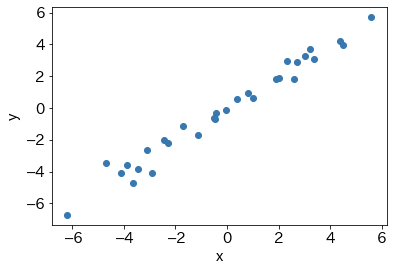
X = np.random.normal(scale=3,size=n)
Yob = np.dot(X,theta) + np.random.normal(scale=sd,size=n)
newx = np.linspace(X.min(),X.max(),100) # 予測点
plt.scatter(X,Yob)
plt.xlabel('x')
plt.ylabel('y')
plt.show()
y\sim N(k(x)^TK^{-1}_{ob}y_{ob},k(x,x)-k(x)^TK^{-1}_{ob}k(x))
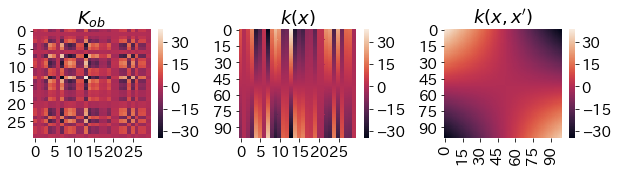
# カーネル関数の計算
Kob = GPk(X,X,sd=sd)
kx = GPk(newx,X,sd=sd)
knewx = GPk(newx,newx,sd=sd)
plt.figure(figsize=(10,2))
plt.subplots_adjust(wspace=0.4)
plt.subplot(131)
sns.heatmap(Kob)
plt.title('$K_{ob}$')
plt.subplot(132)
sns.heatmap(kx)
plt.title('$k(x)$')
plt.subplot(133)
sns.heatmap(knewx)
plt.title('$k(x,x\')$')
plt.show()
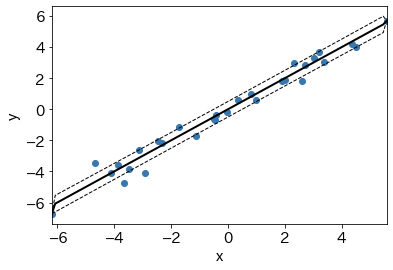
# ガウス過程による回帰関数の予測
GPf = np.dot(kx, np.linalg.solve(Kob,Yob))
GPv = np.maximum(np.diag(knewx- np.dot(kx, np.linalg.solve(Kob,kx.T))),0)
# プロット
plt.xlim(X.min(),X.max())
plt.scatter(X,Yob) # データ点
plt.plot(newx, GPf, 'k-', lw=2) # 推定した回帰関数
# 信頼区間
plt.plot(newx, GPf+np.sqrt(GPv), 'k--', lw=1)
plt.plot(newx, GPf-np.sqrt(GPv), 'k--', lw=1)
plt.xlabel('x')
plt.ylabel('y')
plt.show()
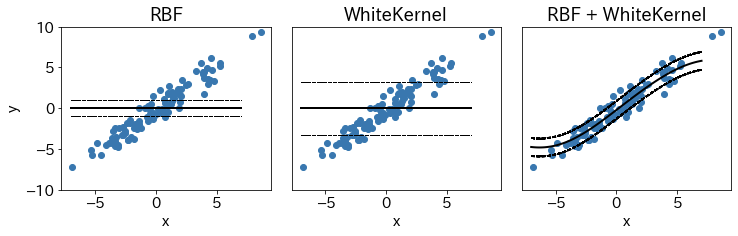
非線形回帰
- ガウスカーネル:RBF
- ホワイトカーネル:$I\ \ \ [x=x']$
# トレーニングデータの生成
n, sd = 100, 1 # 設定
theta = 1 # 回帰係数
X = np.random.normal(scale=3, size=n).reshape(n,-1)
Yob = np.dot(X,theta) + np.random.normal(scale=sd,size=n).reshape(n,-1)
# プロット
plt.figure(figsize=(12,3))
plt.subplots_adjust(wspace=0.1)
plt.subplot(131)
kk = gp.kernels.RBF()
# kk = gp.kernels.WhiteKernel()
# kk = gp.kernels.RBF() + gp.kernels.WhiteKernel()
gpm = gp.GaussianProcessRegressor(kernel=kk)
gpm.fit(X, Yob) # データへのフィッティング
newx = np.linspace(-7,7,100).reshape(100,-1) # 予測点
GPf, GPv = gpm.predict(newx, return_cov=True) # 予測値と分散共分散行列
GPsd = np.sqrt(np.diag(GPv)) # 予測値の標準偏差
plt.ylim(-10,10)
plt.scatter(X,Yob)
plt.plot(newx, GPf,'k-', lw=2)
plt.plot(newx, GPf+GPsd,'k--', lw=1)
plt.plot(newx, GPf-GPsd,'k--', lw=1)
plt.xlabel('x')
plt.ylabel('y')
plt.title('RBF')
plt.subplot(132)
# kk = gp.kernels.RBF()
kk = gp.kernels.WhiteKernel()
# kk = gp.kernels.RBF() + gp.kernels.WhiteKernel()
gpm = gp.GaussianProcessRegressor(kernel=kk)
gpm.fit(X, Yob) # データへのフィッティング
newx = np.linspace(-7,7,100).reshape(100,-1) # 予測点
GPf, GPv = gpm.predict(newx, return_cov=True) # 予測値と分散共分散行列
GPsd = np.sqrt(np.diag(GPv)) # 予測値の標準偏差
plt.ylim(-10,10)
plt.scatter(X,Yob)
plt.plot(newx, GPf,'k-', lw=2)
plt.plot(newx, GPf+GPsd,'k--', lw=1)
plt.plot(newx, GPf-GPsd,'k--', lw=1)
plt.xlabel('x')
plt.tick_params(left=False,labelleft=False)
plt.title('WhiteKernel')
plt.subplot(133)
# kk = gp.kernels.RBF()
# kk = gp.kernels.WhiteKernel()
kk = gp.kernels.RBF() + gp.kernels.WhiteKernel()
gpm = gp.GaussianProcessRegressor(kernel=kk)
gpm.fit(X, Yob) # データへのフィッティング
newx = np.linspace(-7,7,100).reshape(100,-1) # 予測点
GPf, GPv = gpm.predict(newx, return_cov=True) # 予測値と分散共分散行列
GPsd = np.sqrt(np.diag(GPv)) # 予測値の標準偏差
plt.ylim(-10,10)
plt.scatter(X,Yob)
plt.plot(newx, GPf,'k-', lw=2)
plt.plot(newx, GPf+GPsd,'k--', lw=1)
plt.plot(newx, GPf-GPsd,'k--', lw=1)
plt.xlabel('x')
plt.tick_params(left=False,labelleft=False)
plt.title('RBF + WhiteKernel')
plt.show()
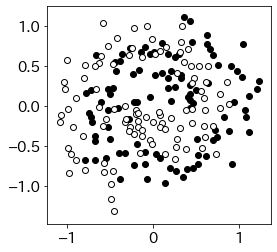
判別分析
まずはパラメトリックモデルの仮定。$\tau(z)$はシグモイド関数や標準正規分布の分布関数
$p(y|x;w)=\tau (y\color{red}{x^Tw})$
2値分類問題の場合、$\tau(z)$の性質より$\color{red}{x^Tw} \geq 0$なら$y=1$、$\color{red}{x^Tw} <0$なら$y=-1$
点$x$でのラベル$y$の予測分布
$p(y|x;D)=\int \tau(y\color{red}{x^Tw})p(w|D)dw$
ノンパラ
判別分析では、ラプラス近似で事後分布を求める。事後分布の対数を最大化する点を$f=\tilde{f}$とし、その周りでテーラー展開する。
$p(f|D)\propto \color{red}{p(y|f)}p(f)=\color{red}{\sum_{i=1}^n\tau(y_if(x_i))}p(f)$
from common import mlbench as ml # code_mlbench.spirals を使う
X, y = ml.spirals(200,cycles=1.2,sd=0.16) # データ生成
plt.figure(figsize=(4,4))
plt.scatter(X[y==0,0],X[y==0,1],color='k')
plt.scatter(X[y==1,0],X[y==1,1],color='w',edgecolors='k')
plt.show()
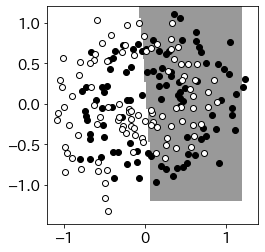
kk = gp.kernels.RBF()+gp.kernels.WhiteKernel() # カーネル設定
gpm = gp.GaussianProcessClassifier(kernel=kk)
gpm.fit(X,y) # データ・フィッティング
m = 100; newx = np.linspace(-1.2,1.2,m) # 予測点生成
newdat = np.array([(y, x) for x in newx for y in newx])
GPpred = gpm.predict(newdat) # 予測ラベル
# プロット
ext=(-1.2,1.2,-1.2,1.2)
plt.figure(figsize=(4,4))
plt.imshow(GPpred.reshape(m,-1)[::-1],cmap='gray',extent=ext, alpha=0.4)
plt.scatter(X[y==0,0],X[y==0,1],color='k')
plt.scatter(X[y==1,0],X[y==1,1],color='w',edgecolors='k')
plt.show()
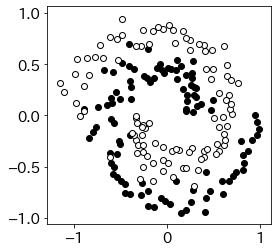
ベイズ最適化
ベイズ最適化の流れ(最小化問題の場合)
- 繰り返し点数$T$、カーネル関数、獲得関数$a(x)$、関数評価の初期点$x_1$を定める
- 以下を$T$回繰り返す
- 入力$x_t$に対する出力$y_t$を得る
- これまでの最適値$\hat{f}=\min_{t'=1\cdots t}{y_{t'}}$ と対応する$x_{opt}\in {x_1,\cdots x_t}$を求める
- 獲得関数$a(x)$を更新する
- $a(x)$の最適値を達成する解を$x_{t+1}$とする
- 最適値$\hat{f}$を達成する$x_{opt}$を得る
期待改善量(EI, Expected Improvement)$a_{EI}(x)$
$a_{EI}(x)$を最大にする$x$を求め、その点における$f(x)$の値を観測する。
$$
\begin{eqnarray}
a_{EI}(x) &=& \mathbb{E}_{Z\sim N(\mu(x),v(x))}\left [\max{{0,\hat{f}-f(Z)}}\right ]\
&=& (\hat{f}-\mu(x))\color{red}{\Phi(\hat{f};\mu(x),v(x))}+v(x)\color{blue}{\phi(\hat{f};\mu(x),v(x))}
\end{eqnarray}
$$
$\color{red}{\Phi(f;\mu(x),v(x))}$は正規分布の分布関数の$f$における値、$\color{blue}{\phi(f;\mu(x),v(x))}$は対応する確率密度関数の$f$における値
上側信頼限界(UCB, upper confidence bound)※本来は最大化問題に対して使用されるため「上側」と呼ばれるが、今回は最小化問題について考えているので「下側」と考えて良い。信頼区間の下限が最も小さくなる点を選ぶ。$v$は分散、$\kappa$は重み(自分で決める)。
$a_{UCB}(x)=\mu(x)-\kappa \sqrt{v(x)}$
from sklearn.svm import SVC
from sklearn.model_selection import cross_validate
from skopt import gp_minimize
from scipy.spatial import distance # distanceの計算
X,y = ml.spirals(200,cycles=1,sd=0.1,label=[0,1]) # データ生成
plt.figure(figsize=(4,4))
plt.scatter(X[y==0,0],X[y==0,1],color='k')
plt.scatter(X[y==1,0],X[y==1,1],color='w',edgecolors='k')
plt.show()
目的関数を定義。CV=5としたときのスコア。logCとlogsigはそれぞれ正則化パラメータ$C$の対数とカーネル幅の対数
# 目的関数を定義
def svmcv(par):
logC, logsig = par
sv = SVC(kernel="rbf", gamma=10**logsig, C=10**logC)
cv = cross_validate(sv,X,y,scoring='accuracy',cv=5)
return(1-np.mean(cv['test_score']))
# カーネル幅の範囲をデータから決める
from scipy.spatial import distance # distanceの計算
cg = np.log10(1/np.percentile(distance.pdist(X),[1,99])**2)
space = [(-5.,5.), (cg[1],cg[0])]
%%time
x0 = [0., np.mean(cg)]
op = gp_minimize(svmcv,space,x0=x0,acq_func="EI",n_calls=100,verbose=False)
# op = gp_minimize(svmcv,space,x0=x0,acq_func="EI",n_calls=100,verbose=True)
CPU times: user 1min 41s, sys: 2min 6s, total: 3min 47s
Wall time: 37.4 s
optC,optsig = 10**np.array(op.x)
print('optC ',optC)
print('optsig',optsig)
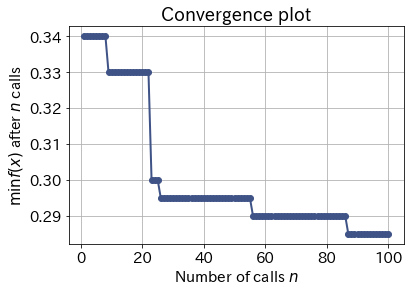
from skopt.plots import plot_convergence
plot_convergence(op)
plt.show()
optC 31405.928164443125
optsig 0.2932912067899352
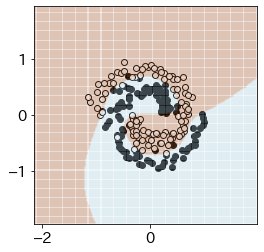
sv = SVC(kernel="rbf", gamma=optsig, C=optC)
sv.fit(X, y)
h = .02 # step size in the mesh
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h), np.arange(y_min, y_max, h))
Z = sv.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
plt.figure(figsize=(4,4))
plt.scatter(X[y==0,0],X[y==0,1],color='k')
plt.scatter(X[y==1,0],X[y==1,1],color='w',edgecolors='k')
plt.pcolormesh(xx, yy, Z, cmap=plt.cm.Paired, alpha=0.1)
plt.show()