目次
- FreeRTOSのタスクとは?
- ブレッドボードの部品配置
- 【実装】delay() で普通にLチカしてみる
- 【実装】FreeRTOSのタスクを使用し、Lチカしてみる
- タスクを使用する上での注意点
- まとめ
1. FreeRTOSのタスクとは?
FreeRTOSにおける「タスク」は、
“自分の仕事を延々と繰り返す、小さなプログラム単位”
です。
Arduino の loop() が 1つしかないのに対し、
FreeRTOS では loop() を複数に分割して独立して動かせる というイメージです。
例:タスクで分割できる処理
・LEDを点滅させるタスク
・0.2秒ごとにシリアル出力するタスク
・センサー値を取得するタスク
・Wi-Fi通信を行うタスク
これらを同時進行で動かせるのがタスクの考え方です。
3章で、loop()単体の挙動との違いを比較します。
2. ブレッドボードの部品配置
ESP32 の実物が少し雑で申し訳ありませんが、
LEDの配線図は以下を参考にしてください。
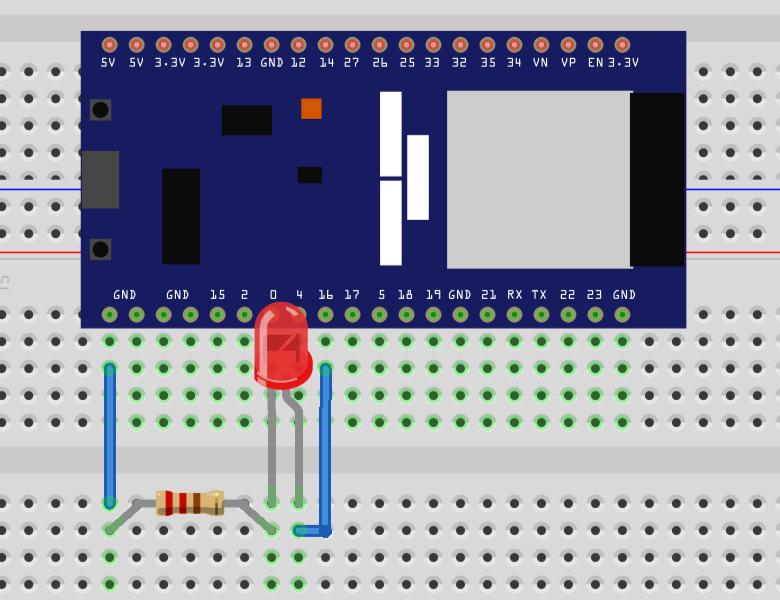
GPIO 16 → LED → 抵抗 → GND
の構成です。
3. 【実装】delay() で普通にLチカしてみる
最初に「Arduino標準のLチカ」を実装して、
delay() がどのように動作を止めてしまうか 確認します。
今回の仕様
・LEDを1秒間隔で点滅
・LEDのON/OFFをシリアル出力
上記の2つのをdelayを使用して実現します。
#include <Arduino.h>
void setup() {
Serial.begin(115200);
//GPIOの16ピンをOUTPUTに設定
pinMode(16, OUTPUT);
}
void loop() {
//LEDをON
digitalWrite(16, HIGH);
delay(1000);
Serial.println("LED is ON");
//LEDをOFF
digitalWrite(16, LOW);
delay(1000);
Serial.println("LED is OFF");
}
▼ 処理の流れ
LED ON→1s待機→"LED is ON表示"→
LED OFF→1s待機→"LED is OFF表示"
(以後ループ)
delay(1000) の間は CPU が完全に停止します。
他の処理は一切動きません。
これがタスクとの大きな違いになります。
それでは次にタスクを使用した場合を確認しましょう。
4. 【実装】FreeRTOSのタスクを使用し、Lチカしてみる
続いて、LED点滅とシリアル出力を 別々のタスク として動かします。
今回の仕様
・LEDを1秒間隔で点滅(タスクA)
・LED状態を0.2秒間隔でシリアル出力(タスクB)
#include <Arduino.h>
bool led_flag = false;
void LedTask(void *pvParameters) {
//GPIOの16ピンをOUTPUTに設定
pinMode(16, OUTPUT);
while (1) {
//LEDをON
digitalWrite(16, HIGH);
led_flag = true;
//1秒待機
vTaskDelay(1000 / portTICK_PERIOD_MS);
//LEDをOFF
digitalWrite(16, LOW);
led_flag = false;
//1秒待機
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
void SerialTask(void *pvParameters) {
while (1) {
if(led_flag) {
Serial.println("LED is ON");
} else {
Serial.println("LED is OFF");
}
//0.2秒待機
vTaskDelay(200 / portTICK_PERIOD_MS);
}
}
void setup() {
Serial.begin(115200);
//2つのタスクを開始
xTaskCreate(LedTask, "LedTask", 2048, NULL, 1, NULL);
xTaskCreate(SerialTask, "SerialTask", 2048, NULL, 1, NULL);
}
void loop() {}
▼ 処理の流れ
タスクA(LED)
LED ON → 1秒休憩 → LED OFF → 1秒休憩
(以後ループ)
タスクB(シリアル)
LEDの状態を出力 → 0.2秒休憩
(以後ループ)
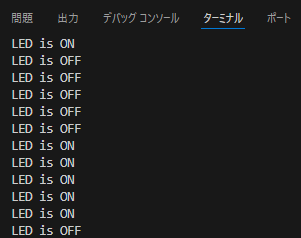
ターミナル上では、
LEDが1秒周期で変化する間にログが5回出ているのが確認できます。
▼ ポイント
・2つの処理が“独立して”動いている
・vTaskDelay() 中は他タスクが動く
5. タスクを使用する上での注意点
FreeRTOSには便利な機能が多い反面、
タスクを扱ううえで押さえるべきポイントがあります。
① タスクを増やしすぎない
タスクが多い=良い ではないです。
推奨:
2〜5個程度
タスク間通信は Queue / Semaphore で整理
※Queue/Semaphoreは別記事で解説予定です。
② スタックサイズは適量に
ESP32はWi-FiやBluetoothで多くのRAMを使用します。
一般的には 2048〜4096 がバランス良いです。
③ 優先度は基本「1」で揃える
初心者ほど“優先度で制御しようとする”傾向がありますが、
実務では優先度1を複数並べた構成の方が安定します。
④ delay() を併用しない
FreeRTOS内で delay() を使うと、
スケジューラが止まりタスク制御が不安定になります。
→ vTaskDelay() を統一的に使うことが大切。
6. まとめ
今回は delay() と vTaskDelay() を比較しながら、
FreeRTOSの「タスク」がどう動くのかを実例で紹介しました。
タスクの本質
・タスクは「独立した仕事単位」
・vTaskDelay は「他タスクへCPUを渡す」ための命令
・delay は「CPUを止める」ため、同時処理には不向き
FreeRTOSでは他にも
Queue・Semaphore・タイマー・イベントグループなど便利な仕組みがあり、
次回以降の記事で比較しながら触れていく予定です。
FreeRTOS × ESP32 記事シリーズ
- タスク入門
- Queue入門
- Semaphore入門
- EventGroup入門
- MessageBuffer入門
- StreamBuffer入門
- Notification入門
- SoftwareTimer入門
Taskをより詳細にまとめていますので良ければご覧ください。